

8.2. Уравнение гармонического колебательного движения.
Пусть
на некоторое тело массы “m”
действует квазиупругая сила
![]() ,
под действием которой тело приобретает
ускорение “a”, тогда по
II-закону Ньютона
,
под действием которой тело приобретает
ускорение “a”, тогда по
II-закону Ньютона
![]() и, следовательно
и, следовательно
![]() (пример, колебание шарика, подвешенного
к пружинке). Здесь движение (колебательный
процесс) происходит вдоль оси “x”.
(пример, колебание шарика, подвешенного
к пружинке). Здесь движение (колебательный
процесс) происходит вдоль оси “x”.
Далее
![]() ;
и
;
и
 ;
тогда
;
тогда
![]() или
или
![]() .
.
Колебательный
процесс возможен, если коэффициент при
“x” положителен, представим
его в виде
![]() (здесь 0 –
вещественная величина). Тогда получим:
(здесь 0 –
вещественная величина). Тогда получим:
|
|
– дифференциальное уравнение гармонического колебания. |
Таким
образом, движение шарика на пружинке
под действием силы
![]() описывается линейным однородным
дифференциальным уравнением 2-го порядка.
описывается линейным однородным
дифференциальным уравнением 2-го порядка.
Решением такого уравнения является функция вида:
![]() , (8.1)
, (8.1)
где А – амплитуда колебаний, величина наибольшего отклонения системы от положения равновесия. Определяется величиной первоначального отклонения (А = const > 0).
(0t+) – фаза колебаний. Физический смысл фазы состоит в том, что она определяет смещение колеблющейся точки в любой момент времени. Постоянная представляет собой значение фазы в момент времени t = 0 и называется начальной фазой колебания. Из уравнения следует, что фазам, отличающимся на величину, кратную 2, соответствуют одинаковые смещения.
Так как смещение системы при колебательном движении представляет периодическую функцию от времени, то и скорость и ускорение такой системы будут также в точности повторяться через равные промежутки времени T, за который фаза колебаний получит приращение, кратное 2. Этот промежуток времени T называется периодом колебаний (или иначе T – это время, за которое совершается полный цикл колебаний).
 (8.2)
(8.2)
С учетом
![]() получим
получим
 . (8.3)
. (8.3)
Из формулы видно, что период колебаний зависит только от свойств самой системы.
Для описания колебательного периодического движения вводится еще несколько величин:
а)
– частота колебаний – это величина
численно равная числу колебаний в
единицу времени.
![]() .
За единицу частоту (1Гц) принимают частоту
такого колебания, период которого равен
1с.
.
За единицу частоту (1Гц) принимают частоту
такого колебания, период которого равен
1с.
б) 0 = 2 – круговая или циклическая частота (0 – число колебаний за 2 секунд).
Для колебательного процесса смещение, скорость и ускорение можно представить как аналитически:
1.
![]() .
.
2.
 .
.
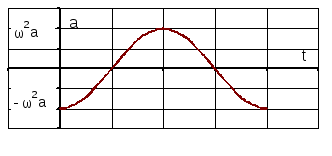
3.
![]() .
.
т
Рис. 8.2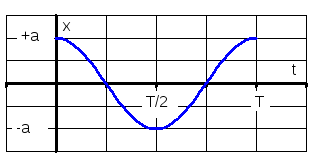

8.3. Графическое изображение гармонических колебаний. Векторная диаграмма.
Сложение нескольких колебаний одинакового направления (или, что то же самое, сложение нескольких гармонических функций) значительно облегчается и становится наглядным, если изображать колебания графически в виде векторов на плоскости.
В
Рис. 8.3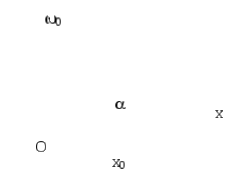
0t1+; 0t2+; 0t3+; и т.д.
А проекция этого вектора будет перемещаться по оси «x» в пределах от –А до +А. Причем координата этой проекции будет изменяться со временем по закону:
![]() .
.
Следовательно, проекция конца вектора на некоторую произвольную ось будет совершать гармоническое колебание с амплитудой равной длине вектора, круговой частотой равной угловой скорости вращения вектора и начальной фазой равной углу, образованному вектором с осью в начальный момент времени.
Итак, гармоническое колебание может быть задано с помощью вектора, длина которого равна амплитуде колебания, а направление вектора образует с осью “x” угол равный начальной фазе колебания.
Р
Рис. 8.4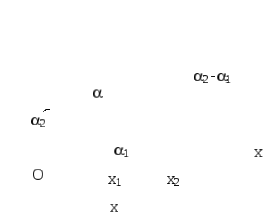
![]()
![]()
Представим
оба колебания с помощью векторов
![]() и
и
![]() (рис. 8.4) По правилам сложения векторов
строим результирующий вектор
(рис. 8.4) По правилам сложения векторов
строим результирующий вектор
![]() .
Проекция этого вектора на ось X
будет равна сумме проекций слагаемых
векторов: x=x1+x2.
Следовательно, вектор
.
Проекция этого вектора на ось X
будет равна сумме проекций слагаемых
векторов: x=x1+x2.
Следовательно, вектор
![]() представляет собой результирующее
колебание. Этот вектор вращается с той
угловой скоростью 0,
что и векторы
представляет собой результирующее
колебание. Этот вектор вращается с той
угловой скоростью 0,
что и векторы
![]() и
и
![]() ,
так что результирующее движение будет
гармоническим колебанием с с частотой
0, амплитудой
«а» и начальной фазой .
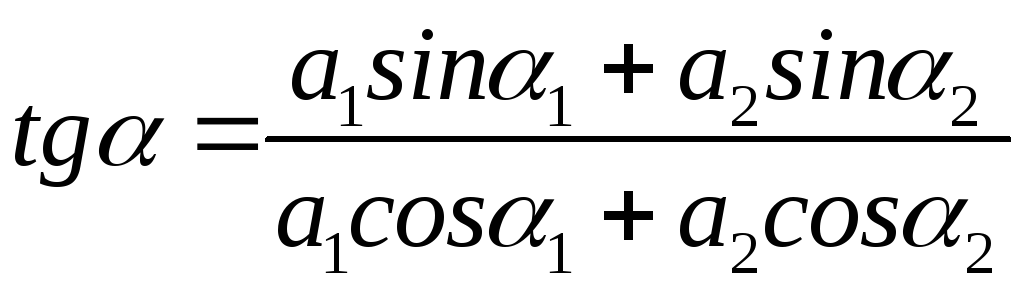
Из построения следует, что
,
так что результирующее движение будет
гармоническим колебанием с с частотой
0, амплитудой
«а» и начальной фазой .
Из построения следует, что
![]() .
.
Итак, представление гармонических колебаний посредством векторов дает возможность свести сложение нескольких колебаний к операции сложения векторов. Этот способ отличается большей простотой и наглядностью, чем использование тригонометрических преобразований.
Проанализируем
выражение для амплитуды. Если разность
фаз обоих колебаний 2
1
= 0, то амплитуда результирующего колебания
равна сумме (а2 + а1).
Если разность фаз 2
1
= + или ,
т.е. колебания находятся в противофазе,
то амплитуда результирующего колебания
равна
![]() .
.
Если
частоты колебаний x1
и x2 неодинаковы,
векторы
![]() и
и
![]() будут вращаться с различной скоростью.
В этом случае результирующий вектор
будут вращаться с различной скоростью.
В этом случае результирующий вектор
![]() пульсирует по величине и вращается с
непостоянной скоростью, Следовательно,
результирующим движением будет в этом
случае не просто гармоническое
колебании, а некоторый сложный
колебательный процесс.
пульсирует по величине и вращается с
непостоянной скоростью, Следовательно,
результирующим движением будет в этом
случае не просто гармоническое
колебании, а некоторый сложный
колебательный процесс.