

-
Основной закон динамики вращательного движения
Основной закон динамики вращательного движения:
в инерциальной системе отсчета угловое
ускорение
![]() ,
приобретаемое телом, вращающимся
относительно неподвижной оси,
пропорционально суммарному моменту
,
приобретаемое телом, вращающимся
относительно неподвижной оси,
пропорционально суммарному моменту
![]() всех сил, действующих на тело, и обратно
пропорционально моменту инерции
всех сил, действующих на тело, и обратно
пропорционально моменту инерции
![]() тела относительно данной оси:
тела относительно данной оси:
![]() .
.
Моментом импульса точки (моментом
количества движения точки) относительно
некоторой неподвижной оси называется
векторная величина
![]() ,
равная произведению момента инерции
,
равная произведению момента инерции
![]() точки на угловую скорость
точки на угловую скорость
![]() ее движения вокруг этой оси:
ее движения вокруг этой оси:
![]() ,
,
![]() .
.
Для материальной точки
![]() и
и
![]() ,
поэтому модуль момента импульса точки
может быть определен как:
,
поэтому модуль момента импульса точки
может быть определен как:
![]() ,
,
где
![]() – модуль импульса материальной точки;
– модуль импульса материальной точки;
![]() – ее расстояние от оси.
– ее расстояние от оси.
Моментом импульса тела (моментом
количества движения тела) относительно
некоторой неподвижной оси называется
векторная величина
![]() ,
равная сумме моментов импульса всех
,
равная сумме моментов импульса всех
![]() точек тела относительно этой оси:
точек тела относительно этой оси:
![]() ,
,
или ![]() ,
,
где
![]() – момент инерции тела относительно
данной неподвижной оси.
– момент инерции тела относительно
данной неподвижной оси.
При использовании момента импульса уравнение основного закона динамики вращательного движения принимает вид
![]() или
или
![]() ,
,
где
![]() – бесконечно малое изменение момента
импульса за промежуток времени
– бесконечно малое изменение момента
импульса за промежуток времени
![]() ;
;
![]() – суммарный момент всех внешних сил,
действующих на тело в данной инерциальной
системе отсчета.
– суммарный момент всех внешних сил,
действующих на тело в данной инерциальной
системе отсчета.
В такой форме основной закон динамики вращательного движения может быть применен к телу, момент инерции которого в процессе движения изменяется, или к системе тел, совершающих вращательное движение вокруг данной неподвижной оси.
Если рассмотреть замкнутую систему тел, то в ней сумма моментов внешних сил равна нулю. Для такой системы
![]() и
и
![]() .
.
Закон сохранения момента импульса:
в инерциальной системе отсчета суммарный момент импульса замкнутой системы тел с течением времени не изменяется.
-
Статика
Раздел динамики, в котором изучается условие равновесия тел, называется статикой11.
Под действием силы тело приобретает ускорение, а под действием момента силы – угловое ускорение. Равновесием тела называется такое его положение, которое может сохраняться достаточно долго без внешних воздействий. В соответствии с основными уравнениями динамики поступательного и вращательного движений, покоящееся тело не начнет двигаться поступательно, если сумма сил, действующих на него равна нулю. Аналогично, неподвижное тело не будет вращаться, если сумма моментов сил, действующих на него, равна нулю. Значит, условиями равновесия покоящегося тела являются равенства нулю суммы сил и моментов сил, действующих на это тело:
![]() (1.2)
(1.2)
Но для того, чтобы судить о поведении тела в реальных условиях, мало знать, что оно находится в равновесии. Надо еще оценить это равновесие. Для этого надо немного (в пределе – бесконечно мало) вывести тело из равновесия. При этом, возможно, появятся силы или моменты сил, и условия равновесия будут нарушены. Если возникающие силы или моменты сил возвращают тело в положение равновесия, то это равновесие устойчиво; если уводят дальше – равновесие неустойчиво, если, наконец, суммы сил и моментов сил остаются равными нулю – равновесие безразличное.
В качестве примера рассмотрим положение
однородного прямоугольного параллелепипеда
на горизонтальной поверхности (рис.
1.18). В позиции а тело не находится в
положении равновесия, ибо предоставленное
самому себе изменит это положение под
действием момента силы тяжести
![]() .
В позициях б – г суммы сил и моментов
сил равны нулю. Следовательно в этих
положениях наблюдается равновесие.
.
В позициях б – г суммы сил и моментов
сил равны нулю. Следовательно в этих
положениях наблюдается равновесие.
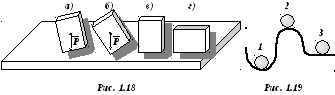
Тело на горизонтальной поверхности находится в равновесии, если вертикальная проекция центра тяжести располагается в площади опоры. Но равновесия бывают разные. На рисунке 1.19 изображены три положения равновесия. Чтобы оценить равновесие тела, чуть-чуть выведем его из начального положения и предоставим самому себе. В положении 1 тело возвращается обратно – равновесие устойчиво; в положении 2 тело удаляется – равновесие неустойчиво; в положении 3 сохраняет его без изменения – равновесие безразличное. Устойчивое положение равновесия, как видно из приведенных примеров, связано с минимумом потенциальной энергии по отношению ко всевозможными близким положениям тела; неустойчивое положение равновесия – с максимумом потенциальной энергии по отношению к таким же положениям; безразличное положение равновесия связано с неизменной потенциальной энергией всех близких состояний.
-
С
 вяжите
возможные состояния равновесия тела
в гравитационном поле с расположением
его центра тяжести.
вяжите
возможные состояния равновесия тела
в гравитационном поле с расположением
его центра тяжести.
Рассматривая равновесия на рисунке 1.18, становится ясным, что в положении б равновесие тела неустойчиво. При отклонении его в любую сторону возникает момент силы тяжести, уводящий тело от этого положения. Равновесия в и г устойчивы. Но устойчивость их различна. При одинаковых размерах (и массах) устойчивость тела тем больше, чем больше его площадь опоры и чем ниже высота центра тяжести.
-
Н

 а
рисунке 1.18 положение г) более устойчиво
по сравнению с положением в). А какое
положение тела будет более устойчиво
чем положение г)?
а
рисунке 1.18 положение г) более устойчиво
по сравнению с положением в). А какое
положение тела будет более устойчиво
чем положение г)?
-
Е
 сли
тело имеет закрепленную ось, то условием
равновесия является равенство нулю
только суммы моментов действующих на
него сил. Как Вы думаете, почему этого
достаточно?
сли
тело имеет закрепленную ось, то условием
равновесия является равенство нулю
только суммы моментов действующих на
него сил. Как Вы думаете, почему этого
достаточно?