

10.3.2 Засоби комплексного відлагодження мпс
Основним методом інтеграції АЗ і ПЗ та комплексного відлагодження МПС є метод внутрішньої схемної емуляції. Даний метод грунтується на тому, що для відлагодження МПС створюється єдина відлагоджувальна система, яка включає в себе прототип МПС, об’єкт або імітатор об’єкта і внутрішній схемний емулятор, яка функціонує як одне ціле під керуванням емулятора (рисунок 10.11).
Внутрішній схемний емулятор (ВСЕ), або просто емулятор, вмонтовується в загальну систему відлагодження МПС, дає можливість відлагоджувати систему так, ніби емулятор є її складовою. Таким чином, ВСЕ- це відлагоджувальний засіб, який під’єднується до відлагоджуваної або тестової системи через мікропроцесорний роз’єднувач і забезпечує керування системою шляхом підміни (емуляції) окремих функціональних вузлів прототипу МПС, в першу чергу МП, відповідними вузлами емулятора.
Емулятор містить цільовий МП, ОЗП, пристрої вводу-виводу (ПВВ), блок керування емулятора, шину керування та системну шину емулятора і з’єднується з прототипом МПС при допомозі (вилку) з двома рядами паралельно розташованих штирьових контактів, які мають теж маркування та специфікацію, що і цільовий МП.
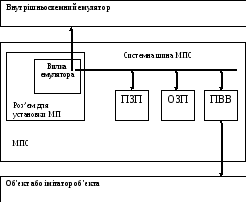
Рисунок 10.11- Структурна схема відлагоджувальної системи
емулятор-МПС-об’єкт
Вказаний роз’єм вставляється в гніздо контактної колодки (розетки) прототипу МПС, на місці установки МП (рисунок 10.12).
Зв’язана з емулятором системна шина МПС забезпечує
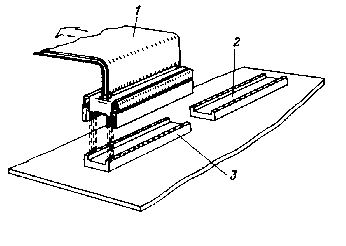
Плоский
кабель зі штиревим роз’ємом
від емулятора;
Колодка для
установки ВІС ППЗП;
Колодка для
установки ВІС МП або підключення
емулятора.
Рисунок 10.12
керування всіма апаратурними засобами прототипу МПС і не вимагає додаткових шин керування.
Після стикування роз’ємів емулятора та прототипу з’єднуються їх системні шини, і прототип МПС може функціонувати так, ніби в прототип установлений справжній МП. Проте є суттєва відмінність емулятора від реального МП: при функціонуванні реального МП (без емулятора) відсутня можливість контролювати внутрішній стан і керувати поведінкою прототипу, крім під’єднаних до МПС вхідних та вихідних пристроїв. З іншої сторони, при допомозі емулятора забезпечується повний контроль стану МП, гнучке керування прототипом в різних режимах, необхідних для відлагодження, а також аналіз помилок в роботі МПС.
Емулятор в процесі відлагодження МПС дозволяє емулювати (замінювати) не тільки цільовий МП, але також деякі функціональні вузли МПС. Наприклад, пам’ять емулятора може бути використана як ОЗП або ППЗП прототипу МПС. Методика відлагодження МПС передбачає поетапну процедуру: від відлагодження з використанням максимально можливого числа вузлів емулятора поступово переходячи на відлагодження з використанням повного складу реальних АЗ прототипу МПС, за виключенням МП.
Розглянемо узагальнену структуру ВСЕ (рисунок 10.13).
ВСЕ складається з таких основних вузлів: заміщуваний МП або його функціональний аналог; тактовий генератор або схема синхронізації; пам’ять емулятора; блок керування; зовнішній інтерфейс зв’язку з керуючими пристроями або периферійним обладнанням; буфер зв’язку з влагодженим МПС.
Всі вузли зв’язані між собою внутрішньою магістраллю емулятора, яка включає ШД, ША і ШК.
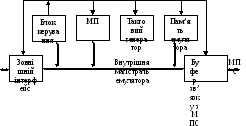
Рисунок 10.13-Узагальнена схема ВСЕ
Відлагодження МПС з допомогою емулятора
Відлагодження МПС при допомозі емулятора можна починати зразу ж після усунення грубих неполадок (коротких замикань та обривів). Одначе спочатку доцільніше провести автономне відладгодження АЗ і ПЗ МПС.
Відлагодження і контроль АЗ МПС при допомозі емулятора здійснюється через послідовне звернення до всіх функціональних вузлів і блоків прототипу МПС, включаючи пристрої вводу-виводу, і перевіряється їх роботоздатність. При цьому доцільна наступна послідовність перевірки: магістральні шини, блок синхронізації (тактовий генератор), пам’ять, пристрої вводу-виводу і т.д.
Після перевірки апаратури прототипу можна почати відлагодження програми. Для початкової перевірки і відлагодження ПЗ МПС існує два основних методи і відповідно режими роботи емулятора: покроковий і трасування, тобто відстежування за ходом виконання програми. При покроковому методі після виконання кожної команди програма зупиняється і її виконання поновлюється за вказівкою оператора. При зупинці програми емулятор забезпечує можливість відображення в наглядній формі інформації про стан АЗ, задіяних в процесі відлагодження (пам’яті, регістрів тощо). Одержані результати порівнюють з очікуваними і, при їх співпаданні, подається команда на виконання наступного кроку програми. Хоча цей метод вимагає значних затрат часу, проте він є ефективним засобом відлагодження ПЗ, оскільки дозволяє виявити низку грубих помилок.
При трасуванні програми емулятор забезпечує виконання програми в автоматичному режимі, запам’ятовуючи в пам’яті або реєструючи на друкуючому пристрої вміст регістрів цільового МП після виконання кожної команди. Деякі емулятори паралельно видають символьне представлення виконуваних команд. Можливий режим трасування, при якому реєструється проходження МП через задані контрольні точки програми з відображенням стану МП в них.
Важливим засобом ефективного відлагоджування ПЗ МПС є використання функції зупинки (переривання емуляції). Різноманітність умов зупинки є важливою технічною характеристикою ВСЕ. До числа найпростіших умов зупинки відносяться: зупинка за кодовим словом, за адресою (команди або даних), за заданим кодом команди або даних, за словом стану МП, за станом вузлів МПС тощо.
Таким чином, апаратурні та програмні засоби ВСЕ дозволяють комплексно, ефективно і за мінімальний час здійснити відлагодження спроектованої МПС.
Список використаних джерел
1. Микропроцессоры. В 3-х кн. Кн. 1. Архитектура и проектирование
микро-ЭВМ. Организация вычислительных процессов: Учеб. для вузов /
Под редакцией Л.Н.Преснухина. М.:Высш. шк.. 1986.-495 с.
2. Микропроцессорные комплекты интегральных схем.Состав и структура:Справ./Под редюА.А.Васенкова,В.А.Шахнова.-М.:Радио и связь,1982-192с.
3.Микропроцессорный комплект К1810.
Структура, программирование, применение. Под редакцией Ю. М. Казаринова. М.: Высш. Шк., 1990.-296 с.
4.Скэнлон Л. Персональные ЭВМ ІВМ РС и ХТ.
Программирование на языке ассемблера: Пер. с англ.-2-е изд., стереотип.-М.:Радио и связь. 1991.-336 с.
5.Сташин В.В. и другие. Проектирование цифровых устройств на однокристальных микроконтроллерах.-М.: Энергоатомиздат, 1990.-224с.
6.Новик Г.Х., Сташин В.В. Проэктирование цифровых устрорйств управления объектами на основе однокристального микроконтролера МК1816ВЕ48. М.: Машиностроение, 1986.
7. Однокристальные микроЭОМ. Семейство МК48. Семейство
МК51 / Липовецкий Г.Н. и др. – М., 1992. – 340с.
8. Домнин С.Б. Средства комплексной отладки микропроцессорных устройств/Под ред. В.Г.Домрачева.- М.:Энергоатомиздат,1988.-145 с.
9. Григорьев В.Л. Програмное обеспечение микропроцессорных систем.
- М.:Энергоатомиздат,1983.-208 с.
10.Токхайм Р. Микропроцессоры:Пер. с англ. /Под ред. В.Н. Грасевича.- М.:Энергоатомиздат,1987.-336 с.