

Доступ до зовнішньої і резидентної пам’яті
В
МПС на базі МК51 можливе використання
двох типів зовнішньої пам’яті: постійної
пам’яті програм (ЗПП) і оперативної
пам’яті даних (ЗПД). Доступ до ЗПП
здійснюється за допомогою строб-сигналу
читання
![]() .
Доступ до ЗПД можливий через сигнали
.
Доступ до ЗПД можливий через сигнали
![]() i
i
![]() ,
які формуються на лініях Р3.7 і Р3.6 порту
3 в режимі альтернативних функцій.
,
які формуються на лініях Р3.7 і Р3.6 порту
3 в режимі альтернативних функцій.
При зверненні до ЗПП завжди використовується 16-бітова адреса, а до ЗПД-16-бітова адреса (MOVX, @ DPTR) або 8-бітова адреса (MOVX A, @ R1).
Доступ
до ЗПП можливий при наявності двох умов:
або на вхід відключення резидентної
пам’яті програм (![]() )
подається сигнал низького рівня, або
вміст лічильника перевищує значення
0FFFH
(при суміщенні РПП і ЗПП). Наявність
сигналу
)
подається сигнал низького рівня, або
вміст лічильника перевищує значення
0FFFH
(при суміщенні РПП і ЗПП). Наявність
сигналу
![]() забезпечує доступ до молодших 4К адрес
адресного простору ЗПП.
забезпечує доступ до молодших 4К адрес
адресного простору ЗПП.
Часова
діаграма вибирання коду команди з ЗПП
приведена на рисунку 8.6. У фазах S2P1,
S2P2 на
виводах порту Р0 формується молодший
байт комірки зовнішньої пам’яті програм,
де знаходиться код наступної команди.
В цей же момент старший байт адреси
видається через порт Р2. Заднім фронтом
сигналу
![]() (фаза S2P2)
фіксується, а порт РО переходить у
Z-стан.
За переднім фронтом стробу PSEN
(фаза S4P1)
код команди зчитується із ЗПП.
(фаза S2P2)
фіксується, а порт РО переходить у
Z-стан.
За переднім фронтом стробу PSEN
(фаза S4P1)
код команди зчитується із ЗПП.
Таймер - лічильник
МК51 має два програмованих 16-бітних таймери/лічильники (Т/Л0 Т/Л1), які можуть використовуватись як таймери або лічильники зовнішніх подій. При роботі його в режимі таймера вміст Т/Л інкрементується в кожному машинному циклі, тобто через кожні 12 періодів резонатора. При роботі його в режимі лічильника вміст Т/Л інкрементується під дією переходів з 1 в 0 зовнішнього вхідного сигналу на відповідних (Т0 і Т1) виводах МК51. Максимальна частота підрахунку вхідних сигналів рівна 1/24 частоти резонатора.
Для керування роботою Т/Л і організації взаємодії таймерів з системою переривань використовуються два регістри спеціальних функцій (TMOD i TCON), опис яких приведений в таблицях 8.7 – 8.8 відповідно.
Таблиця 8.7- Регістр режиму роботи таймера/лічильника.
|
Символ |
Позиція |
Ім’я та призначення |
||
|
GATE |
TMOD.7 для Т/Л1 і TMOD.3 для Т/Л0 |
Керування блокуванням. Якщо біт установлено, то таймер/ лічильник “х” дозволений до тих пір, доки на вході “INTx” високий рівень і біт керування “TRx” установлено. Якщо біт скинуто, тоді Т/Л дозволений, як тільки біт керування “TRx” установлено. |
||
|
Л/ |
TMOD.6 для Т/Л1 і TMOD.2 для Т/Л0 |
Біт вибору режиму таймера або лічильника подій. Якщо його скинуто, то працює таймер від внутрішнього джерела сигналу синхронізації. Якщо біт установлено, тоді працює лічильник від зовнішніх сигналів на вході “Тх”. |
||
|
М1
М0 |
TMOD.5 для Т/Л1 і TMOD.1 для Т/Л0
TMOD.4 для Т/Л1 і TMOD.0 для Т/Л0 |
М1 |
М0 |
Режими роботи |
|
|
|
0 |
0 |
Таймер-лічильник ”TLx” працює як 5-бітовий дільник. |
|
|
|
0 |
1 |
16-бітовий таймер/лічильник. “THx” і “TLx” включені послідовно. |
|
|
|
1 |
0 |
8-бітовий таймер-лічильник з автоперезавантаження. “THx” зберігає значення, яке перезавантажується в “TLx” після чергового переповнення. |
|
|
|
1 |
1 |
Таймер/лічильник 1 зупиняється. Таймер/ лічильник 0: TLO працює як 8-бітовий таймер/ лічильник, і його режим визначається керуючим бітом таймера 0. ТНО працює як 8-бітовий таймер, і його режим визначається керуючим бітом таймера1. |
Таблиця 8.8- Регістр керування/статуса таймера
|
Символ |
Позиція |
Ім’я та призначення |
|
TF1 |
TCON.7 |
Індикатор переповнення таймера 1. Установлюється апаратно. Скидається апаратно при обслуговуванні переривань. |
|
TR1 |
TCON.6 |
Біт керування таймера 1. Визначається програмно, для його пуску або зупинки. |
|
TF0 |
TCON.5 |
Індикатор переповнення таймера 0. Установлюється апаратно і скидається при обслуговуванні переривань. |
|
TR0 |
TCON.4 |
Біт керування таймера 0. Визначається програмно для пуску або зупинки таймера/лічильника. |
|
IE1 |
TCON.3 |
Індикатор фронту переривання 1. Визначається програмно для специфікації запиту INT1. |
|
IT1 |
TCON.2 |
Біт керування типом переривання 1. Визначається програмно для специфікації запиту INT1 (зріз / низький рівень). |
|
IE0 |
TCON.1 |
Індикатор фронту переривання 0. Установлюється за зрізом сигналу INT0. Скидається при обслуговуванні переривань. |
|
IT0 |
TCON.0 |
Біт керування типом переривання 0. Визначається програмно для специфікації запиту INT0 (зріз / низький рівень). |
Для розуміння роботи таймерів/лічильників необхідно попередньо проглянути схемотехніку організації режимів роботи таймера/лічильника, показану на рисунку 8.7. Таймери/лічильники можуть працювати в режимах 0,1,2 і 3 (таблиця 8.7). Коротко розглянемо роботу Т/Л в цих режимах.
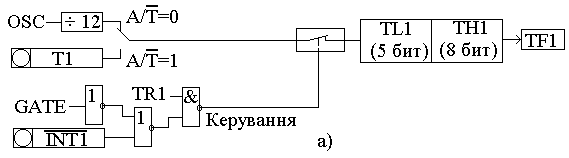
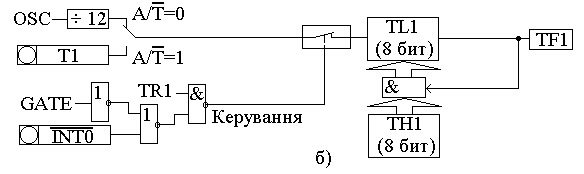
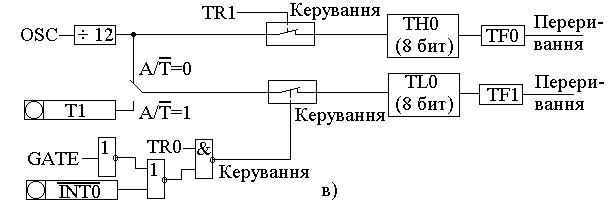
Рисунок 8.7- Таймер/лічильник подій:
а-Т/Л1 в режимі 0: 13-бітовий лічильник; б-Т/Л1 в режимі 2: 8-бітовий лічильник з перезавантаженням; в-Т/Л0 в режимі 3: два 8- бітових лічильники.
Режим 0. В цьому режимі Т/Л працює як 13-бітовий лічильник/таймер. При переході зі стану “всі одиниці” в стан “всі нулі” установлюється індикатор TF1 (рисунок8.7а). Вхідний сигнал таймера 1 дозволений, якщо TR1=1 і або GATE=0 або INT1=1. Коли GATE=1, таймер можна використовувати для вимірювання тривалості імпульсного сигналу на вході INT1.
Режим1. Робота Т/Л аналогічна режиму 0, але таймерний регістр має розрядність 16 бітів.
Режим 2. В Цьому режимі переповнення 8-бітового лічильника TL1 викликає не тільки установку індикатора TF1, але і автоматично перезавантажує в TL1 вміст старшого байта (ТН1) таймерного регістра, що задається програмно (рисунок 8.7б). Вміст ТН1 не змінюється. Т/Л0 і Т/Л1 працюють однаково.
Режим 3. В даному режимі Т/Л0 і Т/Л1 працюють у такий спосіб. Т/Л1 не змінює свого вмісту, а Т/Л0 (рисунок 8.7в) функціонує, як два незалежний 8-бітових лічильники. Проте ТН0 може працювати тільки як таймер при TR1=1. При цьому ТН0 використовує індикатор переповнення TF1.
Робота ТL0 визначається керуючими бітами Л/T, GATE, TRO, вхідним сигналом INTO та індикатором TF0.
Послідовний інтерфейс
Універсальний асинхронний приймач-передавач (УАПП) забезпечує обмін інформації, поданої у послідовному коді (молодшими бітами вперед), в повному дуплексному режимі обміну. В склад УАПП (послідовний порт) входять приймаючі і передаючі зсуваючі регістри, а також спеціальний буферний регістр (SBUF). Запис байта в буфер приводить до автоматичного перезапису байта в зсуваючий регістр передавача і ініціюється початок передачі байта. Наявність буферного регістра приймача дозволяє суміщати операцію читання раніше прийнятого байта, з прийманням чергового байта.
Послідовний порт може працювати в чотирьох режимах.
Режим 0. В цьому режимі інформація передається і сприймається через зовнішній вивід входу приймача (RXD). Довжина посилки даних складає 8 біт. Через зовнішні виводу виходу передавача (TXD) видаються імпульси зсуву, що супроводжують кожен біт. Частота передачі біта інформації рівна 1/12 частоти резонатора.
Режим 1. В цьому режимі передаються через TXD або приймаються через RXD 10 бітів інформації: старт-біт (0), 8 бітів даних і стоп-біт (1). Швидкість передачі/прийому – величина змінна і задається таймером.
Режим 2. В цьому режимі через TXD передаються або із RXD приймаються 11 бітів інформації: старт-біт, 8 бітів даних програмований 9 біт і стоп-біт. При передачі дев’ятий біт даних може приймати значення 0 або1, або ознаку контролю за парністю (вміст індикатора паритету PSW.0). Частота обміну задається програмно і складає 1/32 або 1/64 частоти резонатора (визначається керуючим бітом SMOD).
Режим 3. Цей режим співпадає з режимом 2, проте частота обміну задається таймером.
Керування режимом роботи УАПП здійснюється через програмування спеціального регістра SCON. Функціональне призначення бітів цього регістра показане в таблиці 8.9.
Прикладна програма визначає режим роботи УАПП шляхом завантаження в старші біти регістра SCON 2-бітового коду. У всіх режимах роботи передача із УАПП ініціюється будь-якою командою, де буферний регістр SBUF є приймачем байта. Приймання інформації в УАПП в режимі 0 можливе за умови, що RI=0 i REN=1. В режимах 1,2,3 прийом починається з переходом старт-біта, якщо REN=1.
Таблиця 8.9- Регістр керування/статуса УАПП
|
Символ |
Позиція |
Ім’я та призначення |
||
|
SM0 SM1 |
SCON.7 SCON.6 |
Біти керування режимом роботи УАПП: |
||
|
|
|
SM0 |
SM1 |
Режими роботи УАПП |
|
|
|
0 |
0 |
Зсувний регістр розширення вводу-виводу |
|
|
|
0 |
1 |
УАПП-8 бітів. Змінна швидкість передачі |
|
|
|
1 |
0 |
УАПП-9 бітів. Фіксована швидкість передачі |
|
|
|
1 |
1 |
УАПП-9 бітів. Змінна швидкість передачі |
|
SM2 |
SCON.5 |
Біт керування режимом УАПП. Установлюється програмно для заборони прийому повідомлень, в яких дев’ятий біт має значення 0 |
||
|
REN |
SCON.4 |
Біт дозволу прийому. Установлюється/скидується програмно для дозволу/заборони прийому послідовних даних |
||
|
TB8 |
SCON.3 |
Передача біта 8. Установлюється/скидається програмно для запису дев’ятого біта в режимі передачі УАПП-9 бітів |
||
|
RB8 |
SCON.2 |
Прийом біта 8. Установлюється/скидається апаратно для фіксації дев’ятого прийнятого біта в режимі УАПП-9 бітів |
||
|
TI |
SCON.1 |
Індикатор переривання передавача. Установлюється апаратно при закінченні передачі байта. Скидається програмно після обслуговування переривання |
||
|
RI |
SCON.0 |
Індикатор переривання передавача. Установлюється апаратно після прийому байта. Скидається програмно після обслуговування переривання |
||
В біті ТВ8 програмно установлюється значення дев’ятого біта даних, який характерний для режиму 2 і 3. В біті RB8 фіксується в режимі 2 і 3 дев’ятий прийнятий біт даних. В режимі 1, якщо SM2=0, в біті RB8 заноситься стоп-біт. В режимі 0 біт RB8 не використовується.
Індикатор переривання передавача ТІ установлюється апаратно в кінці періоду передачі восьмого біта даних в режимі 0 і на початку періоду передачі стоп-біта в режимах 1,2,3. У підпрограмі обслуговування переривань необхідно обнулювати біт ТІ.
Індикатор переривання приймача RI установлюється апаратно в кінці періоду приймання восьмого біта даних в режимі 0 і в середині періоду прийому стоп-біта в режимах 1,2,3. Підпрограма обслуговування переривань має скидати біт RI.
Швидкість
обміну УАПП в різних режимах роботи
визначається різними способами. В режимі
0 частота передачі залежить тільки від
резонансної частоти резонатора
![]() За один машинний цикл послідовний порт
передає один біт інформації.
За один машинний цикл послідовний порт
передає один біт інформації.
В режимах 1,2,3 швидкість обміну залежить від керуючого біта SMOD в регістрі спеціальних функцій (регістр PCON). Призначення регістра PCON показане в таблиці 8.10.
В
режимі 2 частота передачі визначається
виразом
![]() .
Якщо SMOD=0
частота
передачі рівна
.
Якщо SMOD=0
частота
передачі рівна
![]() ,
а при SMOD=1
-
,
а при SMOD=1
-
![]() .
.
Таблиця 8.10- Регістр керування потужністю PCON
|
Символ |
Позиція |
Найменування та функція |
|
SMOD |
PCON.7 |
Подвоєння швидкості обміну |
|
|
PCON.6 |
|
|
- |
PCON.5 |
Не використовуються |
|
- |
PCON.4 |
|
|
GF1 |
PCON.3 |
Індикатори, що визначаються користувачем |
|
GF2 |
PCON.2 |
|
|
PD |
PCON.1 |
Біт зниження споживаної потужності МК |
|
IDL |
PCON.0 |
Біт неробочого ходу. Якщо IDL=1, то наступає режим неробочого ходу |
 -
-Зауваження. Обнуління вмісту PCON виконується шляхом завантаження в нього коду ****0000.
В режимах 1 і 3 у формуванні частоти передачі крім керуючого біта SMOD приймає участь таймер 1. При цьому частота передачі залежить від частоти переповнення (OVT1) і визначається у такий спосіб:
![]()
Переривання від таймера 1 в цьому випадку має бути заблоковане. Сам Т/Л1 може працювати і як таймер, і як лічильник подій в будь-якому з трьох режимів. Однак найвдалішим є використання режиму таймера з автозавантаженням (старша тетрада TMOD=0010 B). При цьому частота передачі визначається виразом:
![]()
З особливостями роботи УАПП в різних режимах детально можна ознайомитись у спеціальній літературі [ ].
Система переривань
Спрощена схема переривань МК51 подана на рисунку 8.8.
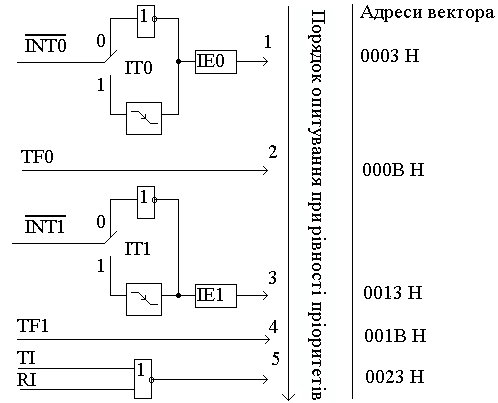
Рисунок 8.8- Схема переривань МК51
Зовнішні
переривання
![]() і
і
![]() можуть викликатись рівнем 0 або переходом
сигналу з 1 в 0 на входах МК в залежності
від значень керуючих бітів ІТ0 і ІТ1 в
регістрі ТCON. Від зовнішніх переривань
установлюється індикатори ІЕ0 і ІЕ1 в
регістрі ТCON, які ініціюють виклик
відповідної програми обслуговування
переривань. Обнуління цих індикаторів
виконується апаратно лише тоді, коли
переривання викликане за зрізом сигналу.
Якщо ж переривання викликане рівнем
вхідного сигналу, то скинути індикатор
ІЕ можна у підпрограмі обслуговування
переривань шляхом впливу на джерело
переривань з метою скасування запиту.
можуть викликатись рівнем 0 або переходом
сигналу з 1 в 0 на входах МК в залежності
від значень керуючих бітів ІТ0 і ІТ1 в
регістрі ТCON. Від зовнішніх переривань
установлюється індикатори ІЕ0 і ІЕ1 в
регістрі ТCON, які ініціюють виклик
відповідної програми обслуговування
переривань. Обнуління цих індикаторів
виконується апаратно лише тоді, коли
переривання викликане за зрізом сигналу.
Якщо ж переривання викликане рівнем
вхідного сигналу, то скинути індикатор
ІЕ можна у підпрограмі обслуговування
переривань шляхом впливу на джерело
переривань з метою скасування запиту.
Індикатори запиту переривань від таймерів TFO i TF1 обнулюється автоматично при передачі керування підпрограмі обслуговування. Індикатори запиту переривання RI i TI установлюються блоком керування УАПП апаратно, але скидувати треба їх програмно.
Переривання можуть ініціюватись і відмінятись програмно, оскільки всі перераховані індикатори програмно-доступні.
В блоці регістрів спеціальних функцій є два регістри для керування режимами переривань і рівнями пріоритету (відповідно символьні імена ІЕ і ІР). Формати цих регістрів описані в таблицях 8.11 – 8.12. Можливість програмної установки бітів цих регістрів забезпечує гнучку систему переривань МК51.
Таблиця 8.11- Регістр масок переривань ІЕ
|
Символ |
Позиція |
Ім’я та призначення |
|
ЕА |
IE.7 |
Заблокування переривань. Скидається програмно для заборони всіх переривань незалежно від стану ІЕ4-ІЕ0 |
|
|
IE.6 |
Не використовується |
|
- |
IE.5 |
|
|
ES |
IE.4 |
Біт дозволу переривання від УАПП. Програмна установка/ скидання програмне для дозволу /заборони переривань від індикаторів TI i RI |
|
ET1 |
IE.3 |
Біт дозволу переривання від таймера 1. Програмна установка/ скидання для дозволу /заборони переривань від таймера 1 |
|
EX1 |
IE.2 |
Біт дозволу зовнішнього переривання 1. Програмна установка/ скидання для дозволу /заборони зовнішнього переривання 1 |
|
ET0 |
IE.1 |
Біт дозволу переривання від таймера 0. Програмна установка/ скидання для дозволу /заборони переривань від таймера 0 |
|
EX0 |
IE.0 |
Біт дозволу зовнішнього переривання 0. Програмна установка/ скидання для дозволу /заборони зовнішнього переривання 0 |
 -
-
Таблиця 8.12- Регістр пріоритетних переривань
|
Символ |
Позиція |
Ім’я та призначення |
|
- |
IP.7-IP.5 |
Не використовуються |
|
PS |
IP.4 |
Біт пріоритету УАПП. Програмна установка/ скидання для присвоєння перериванню від УАПП вищого/нижчого пріоритету |
|
PT1 |
IP.3 |
Біт пріоритету таймера 1. Програмна установка/ скидання для присвоєння перериванню від таймера 1 вищого/нижчого пріоритету |
|
PX1 |
IP.2 |
Біт
пріоритету зовнішнього переривання
1. Теж для переривання
|
|
PT0 |
IP.1 |
Біт пріоритету таймера 0. |
|
PX0 |
IP.0 |
Біт пріоритету зовнішнього переривання 0. Працює аналогічно ІР.2 |
Індикатори переривань опитуються в момент S5P2 кожного машинного циклу. Ранжування переривань за рівнем пріоритету виконується на наступному машинному циклі. Система переривань генерує апаратний виклик (LCALL) відповідної програми обслуговування, якщо вона не блокується однією з таких умов:
-
в даний момент обслуговується запит переривань рівного або вищого рівня пріоритету;
-
поточний машинний цикл – не останній в циклі виконання команди;
-
виконується команда RETI або інша команда, пов’язана зі зверненням до регістрів ІЕ або ІР.
За апаратно-сформованим кодом LCALL система переривань розміщує в стеку тільки вміст лічильника команд РС і завантажує в нього адресу вектора підпрограми обслуговування. За адресою вектора має бути розміщена команда безумовного переходу (JMP) до початкової адреси підпрограми обслуговування переривань. Підпрограма обслуговування у випадку необхідності має починатись командами запису в стек (PUSH) регістра PSW, акумулятора, покажчика даних тощо і закінчуватись командами відновлення із стеку (РОР). Підпрограма обслуговування переривань має завершуватись командою RETI, за якою у лічильник команд завантажується зі стеку адреса повернення в основну програму.
Cистема команд МК 51
Система базових команд МК 51 містить 111 базових команд,які за функціональною ознакою поділяють на п’ять груп: команди передачі даних, арифметичні операції, логічних операцій, передачі керування і операцій з бітами. Серед цих команд: 50 однобайтових, 45 двобайтові, 16 трибайтові. Більшість команд (64 однобайтових і двобайтових) виконуються за один машинний цикл, 45 команд за 2 машинні цикли, а комнди множення і ділення виконуються за чотири машинні цикли. При тактовій частоті 2 МГц довжина машинного циклу складає 1 мкс. Перелік базових типів команд МК 51 поданий в таблиці 2.11.
Перший байт команди будь-якого типу і формату операції завжди містить код операції (КОП). Другий і третій байти є або адресою операндів або безпосередні операнди. На рисунку 8.9 показані 13 форматів команд МК 51.