

- •Содержание
- •Глава 1 - Общие сведения о газотурбинных двигателях
- •1.1 — Введение
- •1.2.1.2 — Турбовинтовые двигатели и вертолетные ГТД
- •1.2.1.3 — Двухконтурные турбореактивные двигатели (ТРДД)
- •1.2.1.4 — Двигатели для самолетов вертикального взлета и посадки
- •1.2.1.5 - Комбинированные двигатели для больших высот и скоростей полета
- •1.2.1.6 - Вспомогательные авиационные ГТД и СУ
- •1.2.2 - Авиационные СУ
- •1.2.3 - История развития авиационных ГТД
- •1.2.3.1 - Россия
- •1.2.3.2 - Германия
- •1.2.3.3 – Англия
- •1.3 - ГТД наземного и морского применения
- •1.3.1 - Области применения наземных и морских ГТД
- •1.3.1.1 -Механический привод промышленного оборудования
- •1.3.1.2 - Привод электрогенераторов
- •1.3.1.3 - Морское применение
- •1.3.2 - Основные типы наземных и морских ГТД
- •1.3.2.1 - Стационарные ГТД
- •1.3.2.2 - Наземные и морские ГТД, конвертированные из авиадвигателей
- •1.3.2.3 - Микротурбины
- •1.4 - Основные мировые производители ГТД
- •1.4.1 - Основные зарубежные производители ГТД
- •1.4.2 - Основные российские производители ГТД
- •1.6 - Перечень использованной литературы
- •Глава 2 - Основные параметры и требования к ГТД
- •2.1 - Основы рабочего процесса ГТД
- •2.1.1 - ГТД как тепловая машина
- •2.1.1.1 – Простой газотурбинный цикл
- •2.1.1.2 - Применение сложных циклов в ГТД
- •2.1.2 - Авиационный ГТД как движитель
- •2.1.3 - Полный к.п.д. и топливная эффективность (экономичность) ГТД
- •2.2 - Параметры ГТД
- •2.2.1 - Основные параметры авиационных ГТД
- •2.2.2 - Основные параметры наземных и морских приводных ГТД
- •2.3 - Требования к авиационным ГТД
- •2.3.1 - Требования к тяге (мощности)
- •2.3.2 – Требования к габаритным и массовым характеристикам
- •2.3.3 - Возможность развития ГТД по тяге (мощности)
- •2.3.4 - Требования к используемым горюче-смазочным материалам
- •2.3.4.1 - Топлива авиационных ГТД
- •2.3.4.2 – Авиационные масла
- •2.3.4.3 - Авиационные гидравлические жидкости
- •2.3.5 – Надежность авиационных ГТД
- •2.3.5.1 – Основные показатели
- •2.3.5.1.1 – Показатели безотказности, непосредственно влияющие на безопасность работы двигателя
- •2.3.5.2 – Методология обеспечения надежности
- •2.3.5.2.1 – Этап проектирования
- •2.3.6 - Ресурс авиационных ГТД
- •2.3.6.1 - Методология обеспечения ресурса
- •2.3.6.2 - Количественные показатели ресурса
- •2.3.7 - Требования производственной технологичности
- •2.3.8 - Требования эксплуатационной технологичности
- •2.3.8.1 - Эксплуатационная технологичность - показатель совершенства ГТД
- •2.3.8.2 - Основные качественные характеристики ЭТ
- •2.3.8.3 - Количественные показатели ЭТ
- •2.3.9 - Экономические требования к авиационным ГТД
- •2.3.9.1 - Себестоимость производства
- •2.3.9.2 - Стоимость ЖЦ двигателя
- •2.3.10 - Экологические требования
- •2.3.10.2 - Ограничения по шуму
- •2.3.12 - Соответствие требованиям летной годности
- •2.4 - Особенности требований к ГТД наземного применения
- •2.4.1 - Особенности требований к приводным ГТД для ГПА
- •2.4.1.1 - Требования к характеристикам ГТД
- •2.4.1.2 - Требования к ресурсам и надежности
- •2.4.1.4 - Используемые ГСМ
- •2.4.1.5 - Требования экологии и безопасности
- •2.4.1.6 - Требования производственной и эксплуатационной технологичности
- •2.4.2 - Особенности требований к ГТД энергетических установок
- •2.4.2.1 - Требования к характеристикам ГТД
- •2.4.2.2 - Используемые ГСМ
- •2.4.2.3 - Требования к ресурсам и надежности
- •2.4.2.4 - Требования к экологии и безопасности
- •2.4.2.5 - Требования к контролепригодности, ремонтопригодности и др.
- •2.5 - Методология проектирования
- •2.5.1 - Основные этапы проектирования ГТД
- •2.5.1.1 - Техническое задание
- •2.5.1.2 – Техническое предложение
- •2.5.1.3 – Эскизный проект
- •2.5.1.4 – Технический проект
- •2.5.1.5 – Разработка конструкторской документации
- •2.5.2 - Разработка конструкций ГТД на основе базовых газогенераторов
- •2.5.2.1 - Газогенератор – базовый узел ГТД
- •2.5.2.2 – Основные параметры и конструктивные схемы газогенераторов ГТД
- •2.5.2.3 – Создание ГТД различного назначения на базе единого газогенератора
- •2.6.1.1 — Общие положения по авиационным ГТД
- •2.6.1.2 — Общие положения по сертификации наземной техники
- •2.6.1.3 — Общие положения по сертификации производства и СМК
- •2.6.1.4 — Органы регулирования деятельности
- •2.6.1.4.1 — Авиационная техника
- •2.6.1.4.2 — Органы регулирования деятельности по сертификации производства и СМК
- •2.6.2.1 — Авиационная техника
- •2.6.2.2 — Наземная техника
- •2.6.2.3 Производство и СМК
- •2.6.2.4 — Принятые сокращения и обозначения
- •2.6.3.1 — Основные этапы создания авиационных ГТД
- •2.6.3.2 — Этапы процесса сертификации авиационных ГТД
- •Глава 3 - Конструктивные схемы ГТД
- •3.1 - Конструктивные схемы авиационных ГТД
- •3.1.1 - Турбореактивные двигатели
- •3.1.2 - Двухконтурные турбореактивные двигатели
- •3.1.3 - Турбовинтовые и вертолетные ГТД
- •3.2 - Конструктивные схемы наземных и морских ГТД
- •3.2.1 - Одновальные ГТД
- •3.2.2 - ГТД со свободной силовой турбиной
- •3.2.3 - ГТД со «связанным» КНД
- •3.2.4 - Конструктивные особенности наземных ГТД различного назначения
- •3.2.5 - Конструктивные особенности ГТД сложных циклов
- •3.4 - Перечень использованной литературы
- •Глава 4 - Силовые схемы ГТД
- •4.1 - Усилия, действующие в ГТД
- •4.1.2 - Крутящие моменты от газовых сил
- •Глава 5 - Компрессоры ГТД
- •6.4.4 - Корпуса КС
- •6.4.4.1 - Наружный корпус КС
- •6.4.4.2 - Внутренний корпус КС
- •6.4.4.3 - Разработка конструкции корпусов
- •6.4.5 - Системы зажигания ГТД
- •6.5 - Экспериментальная доводка КС
- •6.6 - Особенности КС двигателей наземного применения
- •6.7 - Перспективы развития камер сгорания ГТД
- •Глава 7 - Форсажные камеры
- •7.1 - Характеристики ФК
- •7.2 - Работа ФК
- •7.3 - Требования к ФК
- •7.4 - Схемы ФК
- •7.4.2 - Вихревые ФК
- •7.4.3 - ФК с аэродинамической стабилизацией
- •7.5 - Основные элементы ФК
- •7.5.1 - Смеситель
- •7.5.2 - Диффузоры
- •7.5.3 - Фронтовые устройства
- •7.5.4 - Корпусы и экраны
- •7.6 - Управление работой ФК
- •7.6.1 - Розжиг ФК
- •7.6.2 - Управление ФК на режимах приемистости и сброса
- •7.6.3 - Управление ФК на стационарных режимах
- •Глава 8 - Турбины ГТД
- •8.2 - Аэродинамическое проектирование турбины
- •8.2.2 - Технология одномерного проектирования турбины
- •8.2.4 - 2D/3D-моделирование невязкого потока в проточной части турбины
- •8.2.5 - 2D/3D-моделирование вязкого потока в турбине
- •8.2.6 - Синтез геометрии профилей и лопаточных венцов
- •8.2.7 - Одномерное проектирование турбины
- •8.2.7.1 - Выбор количества ступеней ТВД
- •8.2.7.2 - Выбор количества ступеней ТНД
- •8.2.7.3 - Аэродинамическое проектирование и к.п.д. турбины
- •8.2.9 - Методы управления пространственным потоком в турбине
- •8.2.10 - Экспериментальное обеспечение аэродинамического проектирования
- •8.2.11 - Перечень использованной литературы
- •8.3 - Охлаждение деталей турбины
- •8.3.1 - Тепловое состояние элементов турбин
- •8.3.1.1 - Принципы охлаждения
- •8.3.2 - Конвективное, пленочное и пористое охлаждение
- •8.3.3 - Гидравлический расчет систем охлаждения
- •8.3.4 - Методология расчета температур основных деталей турбин
- •8.3.5 - Расчет полей температур в лопатках
- •8.3.6 - Перечень использованной литературы
- •8.4 - Роторы турбин
- •8.4.1 - Конструкции роторов
- •8.4.1.1 - Диски турбин
- •8.4.1.2 - Роторы ТВД
- •8.4.1.3 - Роторы ТНД и СТ
- •8.4.1.4 - Примеры доводки и совершенствования роторов
- •8.4.1.5 - Предотвращение раскрутки и разрушения дисков
- •8.4.2 - Рабочие лопатки турбин
- •8.4.2.1 - Соединение рабочих лопаток с диском
- •8.4.3 - Охлаждение рабочих лопаток
- •8.4.4 - Перечень использованной литературы
- •8.5 - Статоры турбин
- •8.5.1 - Корпусы турбин
- •8.5.2 - Сопловые аппараты
- •8.5.3 - Аппараты закрутки
- •8.5.4 – Перечень использованной литературы
- •8.6 - Радиальные зазоры в турбинах
- •8.6.1 - Влияние радиального зазора на к.п.д. турбины
- •8.6.2 - Изменение радиальных зазоров турбины в работе
- •8.6.3 - Управление радиальными зазорами
- •8.6.4 - Выбор радиального зазора при проектировании
- •8.6.5 - Перечень использованной литературы
- •8.7 - Герметизация проточной части
- •8.7.1 - Герметизация ротора и статора от утечек охлаждающего воздуха
- •8.7.2 - Уплотнения между ротором и статором
- •8.7.3 - Перечень использованной литературы
- •8.8 - Материалы основных деталей турбины
- •8.8.1 - Диски и роторные детали турбины
- •8.8.2 - Сопловые и рабочие лопатки
- •8.8.3 - Покрытия лопаток
- •8.8.4 - Корпусы турбин
- •8.9.1 - Перечень использованной литературы
- •8.10.1 - Прогары и трещины лопаток ТВД
- •8.10.3 - Недостаточный циклический ресурс и поломки роторных деталей
- •8.10.4 - Устранение дефектов турбины в ходе доводки
- •8.11 - Перспективы развития конструкций и методов проектирования турбин
- •8.11.1 - 2D-аэродинамика: эффективные охлаждаемые лопатки ТВД
- •8.11.2 - 2D-аэродинамика: сокращение количества лопаток
- •8.11.3 - Противоположное вращение роторов ТВД и ТНД
- •8.11.4 - 2D-аэродинамика: эффективные решетки профилей ТНД
- •8.11.5 - 3D-аэродинамика: эффективные формы лопаточных венцов
- •8.11.6 - Новые материалы и покрытия для лопаток и дисков
- •8.11.7 - Совершенствование конструкций охлаждаемых лопаток
- •8.11.8 - Оптимизированные системы управления радиальными зазорами
- •8.11.9 - Развитие средств и методов проектирования
- •Глава 9 - Выходные устройства ГТД
- •9.1 - Нерегулируемые сопла
- •9.2 - Выходные устройства ТРДД
- •9.2.1 - Выходные устройства со смешением потоков
- •9.2.2 - Выходные устройства ТРДД с раздельным истечением потоков
- •9.3 - Регулируемые сопла
- •9.3.1 - Осесимметричные регулируемые сопла
- •9.3.1.1 - Регулируемое сопло двигателя Д30-Ф6
- •9.3.2 - Плоские сопла
- •9.4 - Выходные устройства двигателей самолетов укороченного и вертикального взлета-посадки
- •9.5 - «Малозаметные» выходные устройства
- •9.6 - Реверсивные устройства
- •9.6.1 - Реверсивные устройства ковшового типа
- •9.6.2 - Реверсивные устройства створчатого типа
- •9.6.3.1 - Гидравлический привод реверсивного устройства
- •9.6.3.3 - Механический замок фиксации положения реверсивного устройства
- •9.7 - Приводы выходных устройств
- •9.7.1 - Пневмопривод
- •9.7.2 - Пневмомеханический привод
- •9.8 - Выходные устройства диффузорного типа
- •9.8.1 - Конические диффузоры
- •9.8.2 - Осекольцевые диффузоры
- •9.8.3 - Улитки
- •9.8.4 - Соединения с выхлопными шахтами
- •9.8.5 - Выходные устройства вертолетных ГТД
- •9.12 - Перечень использованной литературы
- •Глава 10 - Привод агрегатов, редукторы, муфты ГТД
- •10.1 - Привод агрегатов ГТД
- •10.1.1 - Центральный привод
- •10.1.2 - Коробки приводов агрегатов
- •10.2 - Редукторы ГТД
- •10.2.1 - Редукторы ТВД
- •10.2.1.1 - Общие требования, кинематические схемы
- •10.2.1.2 - Конструкция редукторов ТВД
- •10.2.2 - Редукторы привода несущего и рулевого винтов вертолетов
- •10.2.2.1 - Редукторы привода несущего винта
- •10.2.2.1.1 - Кинематические схемы главных редукторов вертолетов
- •10.2.2.1.2 - Конструкция главных редукторов вертолетов
- •10.2.2.2 - Редукторы хвостовые и промежуточные
- •10.2.3 - Редукторы ГТУ
- •10.2.3.1 - Конструкция редукторов
- •10.3 - Муфты приводов ГТД и ГТУ
- •10.3.1 - Требования к муфтам
- •10.3.2 - Конструкция муфт
- •10.4 - Проектирование приводов агрегатов ГТД
- •10.4.1 - Проектирование центрального привода
- •10.4.1.1 - Конструкция центрального привода
- •10.4.2 - Проектирование коробок приводов агрегатов
- •10.4.2.1 - Конструкция коробки приводов агрегатов
- •10. 5 - Проектирование редукторов
- •10.5.1 - Особенности проектирования редукторов ТВД
- •10.5.2 - Особенности проектирования вертолетных редукторов
- •10.5.3 - Особенности проектирования редукторов ГТУ
- •10.6.1 - Требования к зубчатым передачам
- •10.6.2 - Классификация зубчатых передач
- •10.6.3 - Исходный производящий контур
- •10.6.4 - Нагруженность зубчатых передач
- •10.6.5 - Конструктивные параметры зубчатых передач
- •10.6.5.1 - Конструкции зубчатых колес
- •10.6.6 - Материалы зубчатых колес, способы упрочнения
- •Глава 11 - Пусковые устройства
- •11.1 - Общие сведения
- •11.1.1 - Основные типы пусковых устройств современных ГТД
- •11.1.2 - Технические характеристики пусковых устройств современных ГТД
- •11.2 - Электрические пусковые устройства ГТД
- •11.3 - Воздушные пусковые устройства ГТД
- •11.3.1 - Воздушно - турбинные пусковые устройства ГТД
- •11.3.2 - Регулирующие и отсечные воздушные заслонки
- •11.3.3 - Струйное пусковое устройство ГТД
- •11.4 - Турбокомпрессорные пусковые устройства ГТД
- •11.4.1 - Классификация ТКС ГТД
- •11.4.2 - Принцип действия ТКС
- •11.4.3 - Одновальный ТКС
- •11.4.4 - ТКС со свободной турбиной
- •11.4.5 - Особенности систем ТКС
- •11.5 - Гидравлические пусковые устройства ГТД
- •11.5.1 - Конструкция гидравлических стартеров
- •11.6 - Особенности пусковых устройств ГТД наземного применения
- •11.6.1 - Электрические пусковые устройства
- •11.6.2 - Газовые пусковые устройства
- •11.6.3 - Гидравлические пусковые устройства
- •11.7 - Редукторы пусковых устройств
- •11.8 - Муфты свободного хода пусковых устройств
- •11.8.1 - Муфты свободного хода роликового типа
- •11.8.2 – Муфты свободного хода храпового типа
- •11.9 – Системы смазки пусковых устройств
- •11.11 - Перечень используемой литературы
- •Глава 12 - Системы ГТД
- •12.1.1 - Системы автоматического управления и контроля авиационных ГТД
- •12.1.1.1 - Назначение САУ
- •12.1.1.2 - Состав САУ
- •12.1.1.3 - Основные характеристики САУ
- •12.1.1.5.2 - Порядок разработки САУ
- •12.1.1.5.3 - Основные принципы выбора варианта САУ в процессе проектирования
- •12.1.1.5.4 - Структурное построение САУ
- •12.1.1.5.5 - Программы управления ГТД
- •12.1.1.5.6 - Расчет и анализ показателей надежности
- •12.1.2 - САУ наземных ГТУ
- •12.1.2.1 - Назначение САУ
- •12.1.2.2 - Выбор САУ ГТУ и ее элементов
- •12.1.2.3 - Состав САУ ГТУ
- •12.1.2.4 - Основные характеристики САУ
- •12.1.2.5 - Работа САУ ГТУ
- •12.1.2.6 - Блок управления двигателем (БУД)
- •12.1.2.7 - Особенности системы контроля и диагностики наземных ГТД
- •12.1.4 – Перечень использованной литературы
- •12.2 - Топливные системы ГТД
- •12.2.1 - Топливные системы авиационных ГТД
- •12.2.1.1 - Назначение топливной системы
- •12.2.1.2 - Состав топливной системы
- •12.2.1.3 - Основные характеристики топливной системы
- •12.2.1.4 - Работа топливной системы
- •12.2.1.5 - Выбор топливной системы и ее элементов
- •12.2.1.5.1 – Выбор топливной системы
- •12.2.1.5.2 - Выбор насосов топливной системы
- •12.2.1.5.3 - Определение подогревов топлива в топливной системе
- •12.2.1.5.5 - Математическая модель топливной системы
- •12.2.1.6 - Гидроцилиндры
- •12.2.1.7 - Топливные фильтры
- •12.2.2 - Особенности топливных систем ГТУ
- •12.2.2.1 - Назначение топливной системы
- •12.2.2.2 - Выбор топливной системы и ее элементов
- •12.2.2.3 - Основные характеристики топливной системы
- •12.2.2.4 - Работа топливной системы
- •12.2.4 – Перечень использованной литературы
- •12.3 - Системы диагностики
- •12.3.1 - Общие вопросы диагностирования
- •12.3.1.1 - Задачи диагностирования ГТД
- •12.3.1.3 - Диагностируемые системы ГТД
- •12.3.1.4 - Виды наземного и бортового диагностирования ГТД
- •12.3.1.5 - Структура систем диагностики
- •12.3.1.6 - Регламент диагностирования ГТД
- •12.3.1.7 - Регистрация параметров ГТД
- •12.3.2 - Диагностирование системы механизации ГТД, САУ и ТП ГТД
- •12.3.3 - Диагностирование работы маслосистемы и состояния узлов ГТД, работающих в масле
- •12.3.3.1 - Неисправности маслосистемы и узлов ГТД, работающих в масле
- •12.3.3.2 - Диагностирование по параметрам маслосистемы
- •12.3.3.3 - Контроль содержания в масле частиц износа (трибодиагностика)
- •12.3.4 - Контроль и диагностика по параметрам вибрации ГТД
- •12.3.4.1 - Параметры вибрации и единицы изменения
- •12.3.4.2 - Статистические характеристики вибрации
- •12.3.4.3 - Причины возникновения вибрации в ГТД
- •12.3.4.4 - Датчики измерения вибрации
- •12.3.4.5 - Вибрационная диагностика ГТД
- •12.3.5 - Диагностирование ГТД по газодинамическим параметрам
- •12.3.5.1 - Неисправности проточной части ГТД
- •12.3.5.2 - Требования к перечню контролируемых параметров
- •12.3.5.3 - Алгоритмы диагностирования проточной части ГТД
- •12.3.6 - Обеспечение диагностирования ГТД инструментальными методами
- •12.3.6.1 - Виды неисправностей, выявляемых инструментальными методами
- •12.3.6.2 - Методы и аппаратура инструментальной диагностики
- •12.3.6.2.1 - Оптический осмотр проточной части ГТД
- •12.3.6.2.2 - Ультразвуковой метод диагностирования
- •12.3.6.2.3 - Вихретоковый метод диагностирования
- •12.3.6.2.4 - Капиллярный метод диагностирования с применением портативных аэрозольных наборов
- •12.3.6.2.5 - Диагностирование состояния проточной части ГТД перспективными методами
- •12.3.7 - Особенности диагностирования технического состояния ГТД наземного применения на базе авиационных двигателей
- •12.3.7.1 - Особенности режимов эксплуатации
- •12.3.7.2 - Общие особенности диагностирования наземных ГТД
- •12.3.7.3 - Особенности диагностирования маслосистемы
- •12.3.7.5 - Особенности диагностирования проточной части
- •12.4 - Пусковые системы
- •12.4.1 - Пусковые системы авиационных ГТД
- •12.4.1.1 - Назначение
- •12.4.1.2 - Общие требования
- •12.4.1.3 - Состав пусковых систем
- •12.4.1.4 - Область эксплуатации двигателя, область запуска
- •12.4.1.6 - Надежность запуска
- •12.4.1.7 - Характеристики запуска
- •12.4.1.8. - Выбор типа и параметров стартера
- •12.4.1.9 - Особенности запуска двигателей двухроторных схем
- •12.4.1.10 - Системы зажигания
- •12.4.1.11 - Обеспечение характеристик запуска на разгоне
- •12.4.1.12 - Регулирование компрессора на пусковых режимах
- •12.4.2 - Особенности пусковых систем наземных ГТУ
- •12.4.4 - Перечень использованной литературы
- •12.5 - Воздушные системы ГТД
- •12.5.1 - Функции ВС
- •12.5.2 - Основные требования к ВС
- •12.5.3 - Общие и локальные ВС ГТД
- •12.5.4 - Работа локальных ВС
- •12.5.4.1 - ВС охлаждения турбин ГТД
- •12.5.4.2 - ВС наддува и охлаждения опор
- •12.5.4.2.1 - Работа ВС наддува и охлаждения опор
- •12.5.4.2.2 - Типы ВС наддува и охлаждения опор
- •12.5.4.2.3 - Построение общей схемы ВС наддува и охлаждения опор
- •12.5.4.3 - Противообледенительная система (ПОС)
- •12.5.4.4 - Система кондиционирования воздуха
- •12.5.4.5 - Система активного управления зазорами
- •12.5.4.6 - Системы внешнего охлаждения ГТД
- •12.5.4.7 - Системы внешнего обогрева ГТД
- •12.5.5 - Подготовка воздуха для ВС ГТД
- •12.5.6 - Особенности ВС наземных ГТУ
- •12.5.7 - Агрегаты ВС
- •12.5.9 - Перечень использованной литературы
- •12.6.1 - Общие требования
- •12.6.2 - Схемы маслосистем ГТД
- •12.6.2.1 - Маслосистема с регулируемым давлением масла
- •12.6.2.2 - Маслосистема с нерегулируемым давлением масла
- •12.6.2.3 - Маслосистемы ГТД промышленного применения
- •12.6.3 - Маслосистемы редукторов
- •12.6.3.1 - Маслосистемы авиационных редукторов
- •12.6.3.2 - Маслосистемы редукторов ГТУ
- •12.6.4 - Особенности проектирование маслосистем
- •12.6.5 - Агрегаты маслосистемы
- •12.6.5.1 - Бак масляный
- •12.6.5.2 - Насосы масляные
- •12.6.5.3 - Теплообменники
- •12.6.5.4 - Фильтры и очистители
- •12.6.5.5 - Воздухоотделители и суфлеры
- •12.6.6 - Перспективы развития маслосистем
- •12.6.8 – Перечень использованной литературы
- •12.7 - Гидравлические системы ГТД
- •12.7.1 - Гидросистемы управления реверсивными устройствами
- •12.7.1.1 - Централизованная гидросистема управления реверсивным устройством
- •12.7.1.2 - Автономная гидросистема управления реверсивным устройством
- •12.7.1.3 - Порядок проектирования гидросистем
- •12.7.3 - Перечень использованной литературы
- •12.8 - Дренажные системы
- •12.8.1 - Назначение и классификация систем
- •12.8.2 - Характеристика объектов дренажа
- •12.8.3 - Основные схемы и принцип действия систем
- •12.8.4 - Основные требования к дренажным системам
- •12.8.5 - Обеспечение работоспособности дренажных систем
- •12.8.6 - Особенности конструкции дренажных баков
- •12.8.8 - Перечень использованной литературы
- •Глава 13 - Обвязка авиационных ГТД
- •13.1 - Общая характеристика обвязки
- •13.2 - Конструкция обвязки
- •13.2.1 - Трубопроводные коммуникации
- •13.2.1.1 - Основные сведения
- •13.2.1.2 - Трубы и патрубки
- •13.2.1.3 - Соединения
- •13.2.1.4 - Компенсирующие устройства
- •13.2.1.5 - Соединительная арматура
- •13.2.1.6 - Узлы крепления
- •13.2.1.7 - Неисправности трубопроводов
- •13.2.2 - Электрические коммуникации
- •13.2.2.1 - Общие сведения
- •13.2.2.2 - Конструкция элементов
- •13.2.2.2.1 - Электрические жгуты
- •13.2.2.2.2 - Электрические провода
- •13.2.2.2.3 - Электрические соединители
- •13.2.2.2.4 - Материалы для изготовления электрических жгутов
- •13.2.3 - Узлы крепления агрегатов и датчиков
- •13.2.4 - Механическая проводка управления
- •13.3 - Проектирование обвязки
- •13.3.1 - Требования к обвязке
- •13.3.2 - Основные принципы и порядок проектирования обвязки
- •13.3.3 - Методы отработки конструкции обвязки
- •13.3.3.1 - Натурное макетирование
- •13.3.3.2 - Электронное макетирование обвязки
- •13.3.5 - Проектирование трубопроводных коммуникаций
- •13.3.6 - Проектирование электрических коммуникаций
- •13.3.6.1 - Требования к электрическим коммуникациям
- •13.3.6.2 - Порядок проектирования электрических коммуникаций
- •13.3.6.3 - Разработка электрических схем
- •13.3.6.4 - Разработка монтажных схем
- •13.3.6.5 - Разработка чертежей электрических жгутов
- •13.6 - Перечень использованной литературы
- •Глава 14 - Динамика и прочность ГТД
- •14.1 - Теоретические основы динамики и прочности ГТД
- •14.1.1 - Напряженное состояние, тензор напряжений
- •14.1.2 - Уравнения равновесия
- •14.1.3 - Перемещения в деформируемом твердом теле. Тензор деформаций
- •14.1.4 - Уравнения совместности деформаций
- •14.1.5 - Обобщенный закон Гука
- •14.1.7 - Плоская задача теории упругости
- •14.1.8 - Пластическая деформация материала. Простое и сложное нагружение
- •14.1.11 - Ползучесть. Релаксация напряжений. Длительная прочность
- •14.1.12 - Усталостное разрушение элементов конструкций
- •14.1.13 - Малоцикловая усталость. Термическая усталость
- •14.1.14 - Накопление повреждений при нестационарном нагружении
- •14.1.15 - Закономерности развития трещин в элементах конструкций
- •14.1.16 - Свободные колебания системы с одной степенью свободы
- •14.1.17 - Вынужденные колебания системы с одной степенью свободы
- •14.1.18 - Колебания системы с вязким сопротивлением. Демпфирование колебаний
- •14.1.19 - Вынужденные колебания системы с одной степенью свободы под действием произвольной периодической возмущающей силы
- •14.1.21 - Колебания системы с распределенной массой
- •14.2 - Статическая прочность и циклическая долговечность лопаток
- •14.2.1 - Нагрузки, действующие на лопатки. Расчетные схемы лопаток
- •14.2.2 - Напряжения растяжения в профильной части рабочей лопатки от центробежных сил
- •14.2.3 - Изгибающие моменты и напряжения изгиба от газодинамических сил
- •14.2.5 - Суммарные напряжения растяжения и изгиба в профильной части лопатки
- •14.2.6 - Температурные напряжения в лопатках
- •14.2.7 - Особенности напряженного состояния широкохордных рабочих лопаток
- •14.2.9 - Расчет соединения рабочих лопаток с дисками
- •14.2.10 - Расчет на прочность антивибрационных (бандажных) полок и удлинительной ножки лопатки
- •14.2.11 - Особенности расчета на прочность лопаток статора
- •14.2.13 - Анализ трехмерных полей напряжений и деформаций в лопатках
- •14.3 - Статическая прочность и циклическая долговечность дисков
- •14.3.1 - Расчетные схемы дисков
- •14.3.2 - Расчет напряжений в диске в плоской оссесимметричной постановке
- •14.3.3 - Общие закономерности напряженного состояния дисков
- •14.3.7 - Подтверждение циклического ресурса дисков на основе концепции допустимых повреждений
- •14.3.8 - Расчет роторов барабанного типа
- •14.3.9 - Расчет дисков радиальных турбомашин
- •14.3.10 - Оптимальное проектирование дисков. Равнопрочный диск
- •14.4 - Колебания и вибрационная прочность лопаток осевых компрессоров и турбин
- •14.4.2 - Приближенный расчет собственных частот колебаний лопаток
- •14.4.3 - Трехмерные модели колебаний лопаток
- •14.4.4 - Влияние конструктивных и эксплуатационных факторов на собственные частоты колебаний лопатки
- •14.4.6 - Автоколебания лопаток
- •14.4.7 - Демпфирование колебаний лопаток
- •14.4.8 - Вынужденные колебания лопаток. Резонансная диаграмма
- •14.4.9 - Математическое моделирование вынужденных колебаний лопаток
- •14.4.10 - Экспериментальное исследование колебаний лопаток
- •14.4.11 - Коэффициент запаса вибрационной прочности лопаток, пути его повышения
- •14.4.12 - Колебания дисков
- •14.5 - Динамика роторов. Вибрация ГТД
- •14.5.1 - Критическая частота вращения ротора. История вопроса
- •14.5.2 - Динамика одномассового ротора. Поступательные перемещения
- •14.5.3 - Динамика одномассового ротора. Угловые перемещения
- •14.5.4 - Динамика одномассового несимметричного ротора
- •14.5.5 - Ротор с распределенными параметрами
- •14.5.6 - Особенности колебаний системы роторов и корпусов
- •14.5.7 - Демпфирование колебаний роторов
- •14.5.7.1 - Конструкция и принцип действия демпферов колебаний роторов
- •14.5.7.2 - Расчет параметров демпфирования
- •14.5.7.3 - Особенности гидромеханики реальных демпферов
- •14.5.8 - Вибрация ГТД
- •14.5.8.1 - Источники возмущающих сил и спектр вибрации
- •14.5.8.3 - Статистические характеристики вибрации
- •14.5.8.4 - Измерение и нормирование вибрации
- •14.6 - Прочность корпусов и подвески двигателя
- •14.6.1 - Силовая схема корпуса. Условия работы силовых корпусов
- •14.6.4 - Устойчивость корпусных деталей
- •14.6.5 - Расчет корпусов на непробиваемость
- •14.6.6 - Расчет элементов подвески
- •14.8 – Перечень использованной литературы
- •Глава 15 - Шум ГТД
- •15.1 - Источники шума ГТД
- •15.3 - Методы оценки акустических характеристик
- •15.4 - Снижение шума ГТД
- •15.4.1 - Методология проектирования систем шумоглушения
- •15.4.2 - Шумоглушение в выходных устройствах авиационных ГТД
- •15.4.3 - Конструкция звукопоглощающих узлов авиационных ГТД
- •15.4.4 – Глушители шума в наземных ГТУ
- •15.4.5 – Конструкция глушителей шума наземных ГТД
- •15.7 – Список использованной литературы
- •Глава 16 - Газотурбинные двигатели как силовой привод
- •16.1 - ГТД в силовом приводе ГТЭС и ГПА
- •16.2 - ГТД в силовых (энергетических) установках кораблей и судов
- •16.3 - ГТД в силовых установках танков
- •16.5 - Компоновка корабельных и судовых ГГТД
- •16.6 - Компоновка ГТД в силовой установке танка
- •16.8 – Перечень использованной литературы
- •Глава 17 - Автоматизация проектирования и поддержки жизненного цикла ГТД
- •17.1 - Проектирование и информационная поддержка жизненного цикла ГТД (идеология CALS)
- •17.2 - Жизненный цикл изделия. Обзор методов проектирования
- •17.3 - Программные средства проектирования
- •17.4 - Аппаратные средства систем проектирования
- •17.5 - PDM-системы: роль и место в организации проектирования
- •17.6 - Организация производства и ERP-системы
- •17.7 - Параллельный инжиниринг. Интеграция эскизного и технического проектирования
- •17.8 - Переход на безбумажную технологию
- •17.10 - ИПИ-технологии и эксплуатация изделий
- •17.11 - ИПИ-технологии и управление качеством
- •17.12 - Анализ и реинжиниринг бизнес-процессов
- •17.13 - Основы трехмерного проектирования
- •17.13.1 - Общие принципы трехмерного проектирования
- •17.13.1.1 - Способы создания геометрических моделей
- •17.13.1.2 - Основные термины объемной геометрической модели
- •17.13.1.3 - Принцип базового тела
- •17.13.1.4 - Основные термины при проектировании геометрической модели детали
- •17.13.2 - Управляющие структуры
- •17.13.3 - Принцип «Мастер-модели»
- •17.13.5 - Моделирование сборок
- •17.15 - Перечень использованной литературы
- •Глава 18 - Уплотнения в ГТД
- •18.1 - Уплотнение неподвижных соединений
- •18.2 - Уплотнения подвижных соединений
- •18.2.1 - Гидравлический расчет уплотнений подвижных соединений
- •18.3 - Уплотнение газового тракта между ротором и статором ГТД
- •18.3.1 - Лабиринтные уплотнения
- •18.3.2 - Щеточные уплотнения
- •18.3.3 - Скользящие сухие уплотнения газодинамические
- •18.3.4 - Скользящие сухие уплотнения газостатические
- •18.3.5 - Сравнение эффективностей уплотнений газового тракта между ротором и статором ГТД
- •18.4 - Примеры уплотнений газового тракта ГТД
- •18.4.1 - Пример 1
- •18.4.2 - Пример 2. Уплотнение статорной и роторной частей турбины
- •18.5 - Уплотнения масляных полостей опор роторов, редукторов, коробок приводов
- •18.7 - Перечень использованной литературы

Глава 14 - Динамика и прочность ГТД
Составим уравнение равновесия пирамиды, спроектировав все силы, действующие по его граням, на ось õ. Проекция объемной силы в уравнение не входит, так как представляет собой величи- ну высшего порядка малости по сравнению с проекциями поверхностных сил:
Составив уравнения проекции сил на оси y и z, получим два аналогичных уравнения. В результате будем иметь три уравнения равновесия:
(14.1.6-1)
Эти уравнения связывают нагрузку на поверхности тела с напряжениями теле, т.е. представляют граничные условия задачи теории упругости. Система уравнений теории упругости (14.1.2-2), (14.1.9) и (14.1.16), дополненная граничными условиями по напряжениям (14.1.6-1) и по перемещениям представляет общую постановку собой краевой задачи теории упругости.
Методы решения краевой задачи теории упругости, как точные, так и приближенные можно разделить на две группы: решение в перемещениях и напряжениях.
В первом случае за основные неизвестные принимают перемещения точек упругого тела:
u= f1(x,y,z),
v= f2(x,y,z),
w= f3(x,y,z).
Для получения решений нужно в уравнения обобщенного закона Гука (14.1.16) подставить геометрические соотношения (14.1.9), т.е. выразить напряжения через перемещения, и затем полученные выражения подставить в уравнения равновесия (14.1.2-2), в результате чего получаются три уравнения
ψ1(u,v,w) = 0, ψ2(u,v,w) = 0, ψ3(u,v,w) = 0,
решение которых даст искомые перемещения. Отметим, что граничные условия в напряжениях так-
же необходимо преобразовать в перемещения подобным образом.
Во втором случае за неизвестные принимают компоненты напряжения:
σx = Ô1(x, y, z), σy = Ô2(x, y, z), σz = Ô3(x, y, z),
τxy = Ô4(x, y, z), τyz = Ô5(x, y, z), τzx = Ô6(x, y, z).
Ñпомощью обобщенного закона Гука (14.1.5-
3)и уравнений равновесия (14.1.2-2), шесть уравнений неразрывности деформаций (14.1.4-1) можно записать через напряжения:
F1(σ x,…,τzx) = 0 … F6(σx,…, τzx) = 0.
Решение этих уравнений вместе с граничными условиями дает искомые компоненты тензора напряжений.
14.1.7 - Плоская задача теории упругости
Существуют два важных в практическом отношении частных случая напряженно-деформиро- ванного состояния тела, когда решение задачи теории упругости существенно упрощается. Это плоское деформированное и плоское напряженное состояния.
При плоском деформированном состоянии (см. Рис. 14.1.7_1 а) точки тела не могут перемещаться вдоль оси z из-за препятствия со стороны соседних элементов, т.е. вдали от торцов при большой длине тела перемещения w вдоль оси z отсутствуют (w = 0). Нагрузка, действующая на тело, постоянна вдоль оси z, но может меняться в плоскости õÎó. В таком случае любой элемент единич- ной толщины, вырезанный двумя параллельными сечениями, перпендикулярными оси z, на достаточно большом расстоянии от торцов находится в одинаковых условиях с соседними и испытывает плоское деформированное состояние, перемещения u è v не зависят от координаты z.
При плоском напряженном состоянии размеры тела вдоль оси z малы (см. Рис. 14.1.7_1, б), а боковые плоскости, параллельные õÎó свободны от нагрузки, т.е. напряжения σz, τzx è τzy на этих плоскостях равны нулю. Ввиду малой толщины можно предположить, что и внутри тела, по плоскостям, параллельным õÎó, напряжения пренебрежимо малы, а напряжения σx, σy è τxy не зависят от коор-
929
Глава 14 - Динамика и прочность ГТД
динаты z. Перемещения w вдоль оси z происходят, но они представляют собой функцию напряжений
σx è σy.
Основные уравнения теории упругости в слу- чае плоского деформированного состояния упростятся следующим образом. Все искомые функции станут функциями двух координат. Кроме того равны нулю перемещение w, компоненты тензора деформации, εz, γzx è γzy, компоненты тензора напря-
жений τyz, τzx.
Из третьего уравнения закона Гука (14.1.5-1), считая деформацию εz = 0, получаем:
σz = µ (σx + σy) |
(14.1.7-1) |
Подставив в уравнения (14.1.5-3) выражение (14.1.7-1) и заменив модуль упругости, модуль сдвига и коэффициент Пуассона приведенными величинами:
получим уравнения закона Гука в виде:
(14.1.7-2)
Для плоского напряженного состояния равны нулю деформации γyz è γzx, напряжения σz, τyz è τzx. Уравнения закона Гука принимают вид:
Из трех уравнений равновесия (14.1.2-2) ввиду того, что все напряжения не зависят от z, a τyz è τzx равны нулю, остается два:
(14.1.7-4)
Условия на поверхности (14.1.22) примут вид:
(14.1.7-5)
Из шести уравнений совместности (14.1.4-1) вследствие того, что εx,εy è γxy не зависят от z, εz равно нулю или тоже не зависит от z, à γyz è γzx равны нулю, останется одно:
(14.1.7-6)
Если здесь заменить деформации напряжениями, пользуясь уравнениями (14.1.7-3), и выполнить преобразования уравнение совместности деформации может быть представлено в напряжениях:
èëè
(14.1.7-7)
(14.1.7-3)
Рисунок 14.1.7_1 - Плоское деформированное (а) и плоское напряженное (б) состояния
ãäå 2 - оператор Лапласа.
Из совместного решения этого уравнения и уравнений равновесия (14.1.7-4) могут быть найдены все три неизвестные компоненты напряжения в случае плоской задачи. Так как в эти уравнения не входят упругие постоянные, можно заключить, что в такой постановке задачи напряженное состояние не зависит от материала.
В случае, если объемные силы отсутствуют, задача может быть сведена к отысканию единственной функции, так называемой функции напряжений ϕ. В теории упругости доказано, что существует функция ϕ, через которую могут быть выражены все три неизвестные компоненты напряжения σõ, σy è τõó следующим образом:
930

Глава 14 - Динамика и прочность ГТД
(14.1.7-8).
Можно убедиться, что эти выражения удовлетворяют уравнениям равновесия (14.1.7-4). Подставив в уравнение (14.1.7-70), получим бигармоническое уравнение:
(14.1.7-9)
Решение плоской задачи сводится к отысканию функции ϕ, удовлетворяющей этому уравнению и условиям на поверхности. Существует аналитическое решение этой задачи для некоторых простейших вариантов формы тела. При применении численных методов решение плоской задачи существенно менее трудоемко, чем пространственной.
14.1.8 - Пластическая деформация материала. Простое и сложное нагружение
Для описания явления пластической деформации воспользуемся типичной зависимостью деформации от напряжения (см. Рис. 14.1.8_1), получаемой экспериментально при растяжении образцов из большинства конструкционных материалов.
Если напряжение σ не превышает предела упругости σe, то зависимость между напряжением σ и деформацией ε оказывается линейной:
σ = Εε.
В этой зависимости модуль упругости материала E равен тангенсу угла наклона линейного участка диаграммы (σ - ε). Линейная зависимость между напряжениями и деформациями характерна для упругости, но критерий упругого поведения материалов состоит в том, что после снятия внешнего воздействия все размеры детали восстанавливаются. На диаграмме (σ-ε) (см. Рис. 14.1.8_1) это проявляется следующим образом. Если в точке А0 ïðè σ < σ e прекратить нагружение материала и снять
внешнюю нагрузку, деформация материала исчезнет (точка, изображающая на диаграмме состояние материала, вернется в начало координат). При возрастании напряжений выше предела упругости σ > σ e зависимость σ îò ε перестает быть линейной. Если в некоторый момент нагружения, соответствующий точке А, прекратить нагружение и снять нагрузку, то разгрузка пойдет по прямой АА1, приблизительно параллельной начальному участку. Точка А перейдет в точку А1, и в материале сохранится остаточная деформация εÐ, которая представляет собой пластическую деформацию в материале, образовавшуюся при его нагружении. Полная деформация складывается из упругой εe и пласти- ческой ε p:
ε = ε p + εe |
(14.1.8-1) |
Уравнение (14.1.8-1) справедливо для любого момента деформации. Пластическая деформация существует одновременно с упругой, поэтому следует говорить об упругопластических деформациях материала. Упругая деформация для металлов составляет 0,2…0,8%, пластическая может доходить до 20…40%.
При повторном нагружении из точки А1 процесс нагружения пойдет по прямой А1À, ò.å. ïðå-
Рисунок 14.1.8_1 - Диаграмма деформирования материала
931

Глава 14 - Динамика и прочность ГТД
дел упругости возрастет. Таким образом, после предварительной пластической деформации происходит упрочнение материала, при дальнейшем нагружении (переход от точки А к точке В) деформирование идет так же, как в случае однократного нагружения.
Диаграммы (σ-ε), получаемые при сжатии пластичных материалов, мало отличаются от диаграмм растяжения. Предел упругости в точке A1 (см. Рис. 14.1.8_2) по абсолютной величине такой же, как при растяжении. Иное поведение материала наблюдается, если сжатию предшествовало растяжение в пластической области. Предел упругости существенно уменьшается (точка A*). Этот эффект называется эффектом Баушингера и объясняется остаточным взаимодействием между зернами материала после деформации растяжения.
Влияние температуры на диаграмму растяжения выражается в снижении модуля упругости и п- редела текучести с ростом температуры практически для всех металлов (см. Рис. 14.1.8_3).
Наиболее важными характеристиками сопротивления материала внешним нагрузкам являются пределы текучести и прочности. Предел текучес-
ти характеризует сопротивление материала возникновению пластических деформаций. Так как переход от участка упругости к зоне появления пластических деформаций для большинства материалов носит плавный характер, то условились пределом текучести считать напряжение σ02, соответствующее значению остаточной деформации 0,2%. В отличие от него предел прочности σb– напряжение, соответствующее разрушению образца. Обычно предел текучести составляет (0,5…0,9)σb.
Нагружение считают простым, если все компоненты нагрузок возрастают от нуля одновременно так, что соотношения между ними в любой момент времени сохраняются неизменными, т.е. все внешние силы возрастают пропорционально одному общему параметру. Сами нагрузки при этом могут быть сколь угодно сложны: сосредоточенные силы, равномерно или неравномерно распределенные как по наружной поверхности тела и т.д. Если неизменное соотношение между внешними силами не соблюдается (например, часть сил действует ранее других, или, начав вместе, некоторые из сил прекращают свое действие, а остальные продолжают нарастать и т.д.), то такое нагружение на-
Рисунок 14.1.8_2 - Эффект Баушингера |
Рисунок 14.1.8_3 - Влияние температуры: |
|
T1< T2< T3 |
932

Глава 14 - Динамика и прочность ГТД
зывают сложным, хотя нагрузка по количеству сил, их расположению может быть и простой. Простое и сложное нагружение не следует путать с простым (одноосным) и сложным (когда два или три главных напряжения для рассматриваемой точки отлич- ны от нуля) напряженным состоянием.
Деформацию в некоторой точке называют активной, если интенсивность напряжения для этой точки в каждый момент нагружения имеет значе- ние, превышающее все предшествующие его зна- чения. В случае простого нагружения это происходит при монотонном возрастании нагрузки. Если при деформации интенсивность напряжения меньше предшествующего его значения, деформацию называют пассивной.
14.1.9 - Модели упруго-пластичес- ких деформаций. Метод переменных параметров упругости
Âтеории пластичности используют две группы математических моделей поведения материалов. Их называют теорией упруго-пластических деформаций и теорией течения.
Âпервой группе устанавливают связь между напряжениями и деформациями. Во второй – между напряжениями и бесконечно малыми приращениями деформаций при бесконечно малых приращениях напряжений.
Достоинство моделей первой группы – простота, однако модели этой группы не описывают сложного нагружения и не позволяют учитывать историю нагружения при определении пластических деформаций. Модели второй группы свободны от этих ограничений, но более сложны в использовании. Они не будут рассматриваться здесь,
ñними можно познакомиться в литературе по теории пластичности, например в [14.8.25].
Âоснове теории упруго-пластических деформаций лежит экспериментально обоснованное представление о наличии однозначной зависимости между суммарными деформациями и напряжениями в теле. Для изотропного тела эти зависимости имеют вид:
(14.1.9-1)
ãäå ε0 = (εx+εy+εz )/3 - средние деформации;
σ0 = (σx+σy+σz )/3 - средние напряжения. Экспериментально установлено, что пласти-
ческая деформация не приводит к изменению объема материала, которое пропорционально среднему напряжению. С учетом теплового расширения при изменении температуры:
(14.1.9-2)
В уравнениях (14.1.9-1) величина ψ называется параметром пластичности и вводится как:
(14.1.9-3)
ãäå εi è σi - интенсивности деформаций и напряжений рассмотренные выше.
В теории пластичности часто используется гипотеза единой кривой, состоящая в том, что зависимость между интенсивностями деформаций и напряжений εi = f(σi ), получаемая экспериментально при одноосном растяжении, остается неизменной для любого напряженного состояния. Таким образом, параметр пластичности, вообще говоря, не константа, а функция интенсивности напряжений.
Для того, чтобы понять физический смысл параметра пластичности рассмотрим одноосное растяжение стержня. Все компоненты напряжения, кроме одной равны нулю.
Пусть σx = σ, тогда для интенсивности напряжений из (14.1.1-2) получаем σi = σ. Если продольная деформация стержня εx = ε, то деформации в -
поперечных направлениях εy = -µ*ε è εz = -µ*ε . Здесь µ* - коэффициент Пуассона для пластичес-
ких деформаций, в случае упругих деформаций он равен µ..
Для интенсивности деформаций из (14.1.3-4) находим:
933
Глава 14 - Динамика и прочность ГТД






 .
.
Тогда для одноосного растяжения стержня получаем:
(14.1.9-4)
Здесь σ* = Eε - условное напряжение, которое соответствует деформации e в случае, если бы тело было упругим (точка A* íà Ðèñ. 14.1.8_2).
Таким образом, параметр пластичности можно интерпретировать как отношение напряжений в упругом теле к напряжениям в пластическом теле при одних и тех же деформациях.
На упругом участке кривой деформирования ψ = 1. В этом случае уравнения (14.1.9-1) можно привести к обобщенному закону Гука (14.1.5-3). Так, для рассмотренного выше случая одноосного растяжения стержня средняя деформация равна ε0 = ε(1-2µ)/3, среднее напряжение σ0 = σ/3 è èç (14.1.9-1) ïðè ψ = 1 получаем σ = Eε.
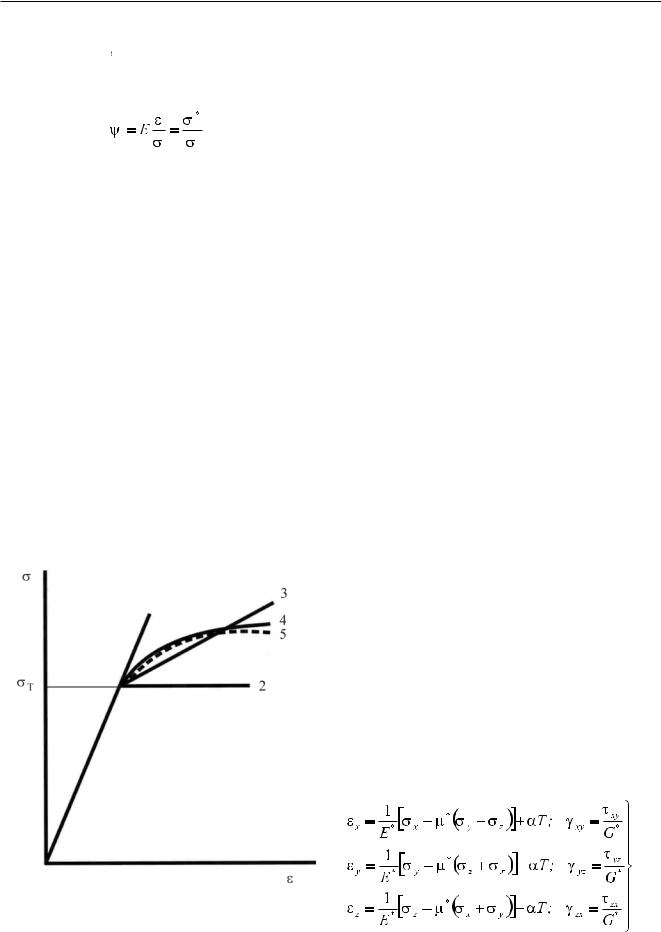
Для математического описания кривой деформирования σi = f(εi) используют различные соотношения (модели) (см. Рис. 14.1.9_1). Простейшая из них – модель идеального упруго-пластического тела (кривая 2), в которой пренебрегают упрочнением материала при пластической деформации. По
Рисунок 14.1.9_1 - Схематизация диаграммы деформирования
мере нагружения при напряжениях менее предела текучести σÒ деформация упругая, она увеличивается пропорционально напряжению (кривая 1). При дальнейшем нагружении деформация увеличивается без увеличения напряжений. Благодаря своей простоте модель используется для оценки эффектов пластической деформации в аналитических расчетах. При развитых пластических деформациях материалов с площадкой текучести (низкоуглеродистых нелегированных сталей, например) эта модель позволяет получать количественные результаты с достаточной для практики точностью. Далее в порядке увеличения точности следуют модели линейного (кривая 3) и степенного (кривая 4) упрочнения. Последние наиболее близки к реальной кривой упрочнения материала (кривая 5). При использовании современных численных методов обычно используются модели того уровня точности, который обеспечивается экспериментальными данными, а не сложностью расчетов.
Система уравнений, описывающая упруго-пла- стическое напряженно-деформированное состояние тела, отличается от системы уравнений теории упругости только соотношениями между деформациями и напряжениями. Она включает в себя уравнения равновесия (14.1.2-2), условия совместности деформаций (14.1.4-1), физические уравнения для упруго-пластического тела (14.1.9-1), а также соотношение (14.1.9-4) для параметра пластичности ψ. Решение должно, кроме того, удовлетворять граничным условиям в перемещениях и напряжениях.
Рассмотрим предложенный И.А.Биргером метод расчета упруго-пластического напряженного состояния – метод переменных параметров упругости. Он сводит упруго-пластическую задачу к цепочке упругих задач в результате применения процесса последовательных приближений. В основе метода лежит использование обобщенного закона Гука, в котором модуль упругости и коэффициент Пуассона зависят от напряжений и поэтому имеют разные значения в разных точках тела.
Уравнения обобщенного закона Гука записываются в виде:
(14.1.9-5)
934

Глава 14 - Динамика и прочность ГТД
Параметры E*, G* è µ* зависят от отношения интенсивностей напряжений и деформаций. В ча- стном случае, когда пренебрегают сжимаемостью материала:
(14.1.9-6)
Процесс последовательных приближений реализуется следующим образом. В первом приближении принимается, что переменные параметры упругости равны параметрам упругости, и решается упругая задача, в результате чего определяются компоненты напряжения и деформации перво-
го приближения σx1, …., τxy1, …, εx1,…, γxy1,… По этим величинам в каждой точке тела вычисляются
интенсивности напряжений и деформаций в первом приближении σi1 è εi1. В координатах σi - εi. (см. Рис. 14.1.9_2) напряженное и деформированное состояние некоторой точки тела изображается точ- кой 1, лежащей на луче, тангенс угла наклона которого пропорционален величине E = 3G.
Во втором приближении вносится поправка для величины E*. В соответствии с (14.1.9-6) она принимается равной отношению интенсивности напряжений σ i1 к интенсивности деформаций εi1 по диаграмме σi-εi (см. Рис. 14.1.9_2). Параметры E* è G* будут различными в разных точках тела. Таким образом, возникает задача определения напряжений в условно неоднородном теле, параметры упругости в различных точках которого раз-
Рисунок 14.1.9_2 - Метод переменных параметров упругости
личны. Далее решают эту задачу, определяют компоненты напряжения и деформации σx2, …, τxy2, …, εx2,…, γxy2,…являющиеся вторым приближением. По этим величинам в каждой точке тела вычисляются интенсивности напряжений и деформаций во втором приближении σi2 è εi2 (точка 2 на Рис. 14.1.9_2).
В третьем приближении величина E* вычисляется как отношение интенсивности напряжений σ*i2 к интенсивности деформаций εi2 по диаграмме деформирования. Далее вычисляют компоненты напряжения и деформации третьего приближения и т.д. Расчет продолжается до тех пор, пока разница результатов в очередном и предыдущем приближениях не станет достаточно малой. Практика расчетов показывает, что процесс хорошо сходится уже на втором – третьем приближениях.
Подобная процедура используется, например, при расчете на прочность дисков ГТД.
14.1.10 - Поведение конструкций при разгрузке. Остаточные напря-
жения
Эффекты, связанные с пластическим деформированием, рассмотрим на примере чистого изгиба стержня прямоугольного сечения. Для простоты используем модель идеального упруго-пластичес- кого тела без упрочнения (см. Рис. 14.1.9_1). Будем считать, что на стержень действуют сосредото- ченные изгибающие моменты M (см. Рис. 14.1.10_1), которые увеличиваются постепенно.
Максимальные напряжения возникают, как известно, в крайних верхних и нижних волокнах. На стадии упругого деформирования они равны:
(14.1.10-1)
ãäå W – момент сопротивления сечения.
Эти напряжения достигают предела текучести при изгибающем моменте:
Пусть изгибающий момент превосходит это значение. При этом в стержне возникает область пластических деформаций, упругими остаются волокна на расстоянии менее h1/2 от нейтральной линии (см. Рис. 14.1.10_1б). В области пластичес-
935

Глава 14 - Динамика и прочность ГТД
à) |
á) |
â) |
ã) |
ä) |
Рисунок 14.1.10_1 - Схема изгиба стержня (а), распределение напряжений после изгиба в пластической области (б), распределение остаточных напряжений (в), распределение напряжений при повторном нагружении (г) и предельное состояние стержня (д)
ких деформаций в соответствии с принятой моделью идеального упруго-пластического тела напряжения равны пределу текучести, в упругой области - пропорциональны расстоянию от нейтральной линии:
(14.1.10-2)
Из условия равновесия
(14.1.10-3)
находим размер пластической зоны:
(14.1.10-4)
Отсюда видно, что с увеличением изгибающего момента пластическая зона постепенно увеличивается, и при некотором предельном значе- нии изгибающего момента MÏÐÅÄ все сечение стержня переходит в пластическое состояние (см. Рис. 14.1.10_1д). Дальнейшее увеличение изгибающего момента в рамках принятой модели идеального упруго-пластического материала невозможно, следовательно он дает оценку предельной несущей способности стержня. Его значение вытекает из
(14.1.10-4) ïðè h1 = 0: MÏÐÅÄ = σTbh2/4.
При разгрузке, как показывают эксперименты, уменьшение напряжений пропорционально уменьшению деформаций. В случае сложного напряженного состояния эта же зависимость формулируется в отношении интенсивностей напряжений и деформаций:
σiразгр = E εiразгр |
(14.1.10-5) |
Напряжения и деформации разгрузки могут быть определены из решения задачи теории упругости для внешних сил, равных разностям сил при нагружении и остающихся после разгрузки. В слу- чае полной разгрузки решается задача теории упругости для внешних сил, нагружающих тело. Это справедливо в том случае, если при разгрузке материал не выходит вновь за пределы упругости.
Поле остаточных напряжений удовлетворяет уравнениям равновесия и граничным условиям по напряжениям, соответствующим нагрузкам, оставшимся после разгрузки. В случае полной разгрузки поле остаточных напряжений должно быть самоуравновешенным. Остаточные напряжения и деформации определяются как разность напряжений и деформаций, достигнутых на стадии нагрузки, и напряжений и деформаций разгрузки:
σij ÎÑÒ |
= σij - σij РАЗГР; |
|
εij ÎÑÒ |
= εij - εij РАЗГР |
(14.1.10-6) |
Вернемся к ситуации, когда в стержне под действием изгибающего момента M возникла пласти- ческая зона размером h – h1 и рассмотрим процесс разгрузки. Напряжение разгрузки, получающееся из решения упругой задачи для изгибающего мо-
936