

новая папка / БЕЗОПАСНОСТЬ ТРАНСПОРТНЫХ СРЕДСТВ В ЭКСПЛУАТАЦИИ
.pdfтягача и полуприцепа. На рисунке 1 приведена его динамическая модель в среде
MSC.ADAMS.
В Республиканском компьютерном центре машиностроительного профиля ГНУ «Объединенный институт машиностроения НАН Беларуси» разработаны и успешно используются методики виртуальных испытаний, позволяющие производить оценку проектируемой техники по показателям управляемости и устойчивости в соответствии с нормативной документацией [1-3].
Рис. 1. Динамическая модель автопоезда в среде MSC.ADAMS
На рисунке 2 показан алгоритм и структура подготовки модели и проведения виртуальных испытаний по оценке показателей управляемости и устойчивости на примере работы в программе MSC. ADAMS.
Динамическая модель автопоезда в программе MSC.ADAMS
Динамические модели узлов автомобиля (подвеска, рулевое управление и т.д.) собираются из примитивов (жесткое тело, пружина, демпфер, кинематическая связь и т.д.) базы данных программы MSC.ADAMS на основании разработанной кинематической схемы данного узла [7]. Первичную проверку динамической модели можно провести с помощью инструмента визуализации, позволяющего отражать характерные движения модели в соответствии с наложенными кинематическими и силовыми связями и ограничениями. Последующее тестирование динамической модели происходит в результате анализа функциональных зависимостей в виде графиков и таблиц, полученных в результате проведения виртуальных испытаний (проведенных расчетов) исследуемой математической модели /8/. Разработка полнокомплектной динамической модели автомобиля включает ее сборку из подмодулей крупных узлов, таких как подвеска, рама, рулевое управление и т.д. В исследуемом автомобиле передняя подвеска - зависимая рессорная, задняя и подвеска полуприцепа – зависимая с пневмобаллонами в качестве упругих элементов. Динамическая модель передней подвески включает: малолистовые рессоры, стабилизатор поперечной устойчивости, амортизаторы, буферы отбоя. Динамическая модель задней подвески и подвески полуприцепа включает: пневмобаллоны с нелинейной характеристикой, опоры пневмобаллонов, поперечная тяга, амортизаторы, буферы отбоя. Общий вид моделей подвесок автопоезда приведен на рисунке 3.
Вподвесках автопоезда установлены амортизаторы и пневмобаллоны, имеющие нелинейные упругие и демпфирующие характеристики, показанные на рисунках 4 и 5.
Всостав рулевого управления входят подмодели рулевого колеса (рис. 6а) рулевого механизма (рис. 6б), рулевой трапеции (рис. 6в). При моделировании рулевого управления в сборе с управляемыми колесами, учтены углы установки управляемых колѐс, углы наклона шкворней и кинематика рулевой трапеции.
Общий вид подмоделей рулевого управления представлены на рис. 6.
10
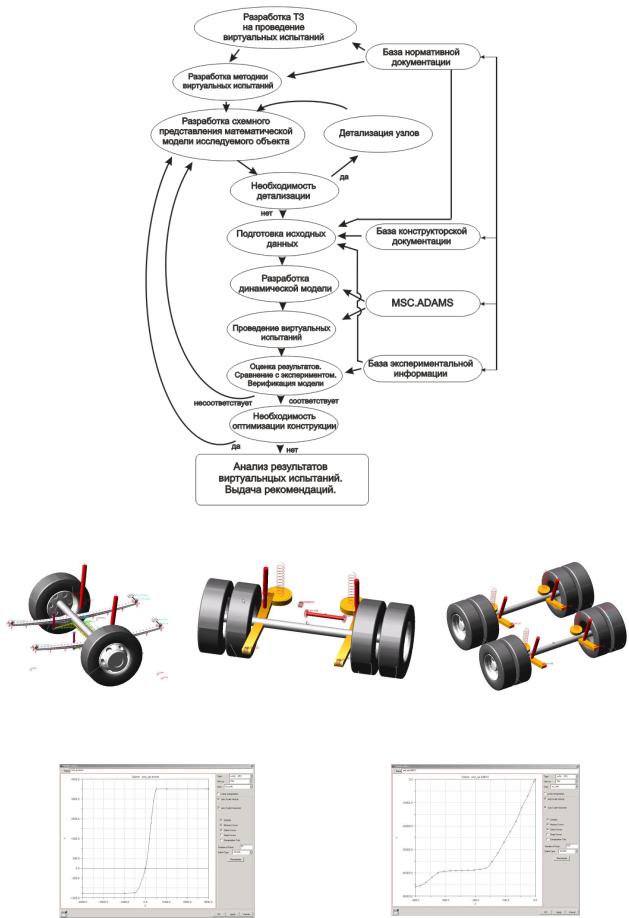
Рис. 2. Алгоритм и структура подготовки модели и проведения виртуальных испытаний
a) |
б) |
в) |
|
Рис. 3. Модели подвесок |
|
|
а – передняя; б – задняя; в – полуприцепа |
|
Рис. 4. Характеристика амортизатора |
Рис. 5. Характеристика пневматического |
|
упругого элемента |
11

Рис. 6. Модели рулевого управления
При разработке полнокомплектной динамической модели автопоезда основные характеристики модели получены из конструкторской документации и натурного эксперимента (рис. 2). Полученные результаты натурных экспериментов отдельных узлов автомобилей используются также и для верификации динамических моделей этих же узлов [4-6]. Схемы и фотографии стендов для испытаний подвесок в сборе, а также рессор и амортизаторов по отдельности приведены на рис. 7-10.
Рис. 7. Принципиальные схемы стендов для испытаний передних и задних подвесок
Рис. 8. Натурные стенды для испытаний передней и задней подвески
Рис. 9. Принципиальная схема управления стендами и натурные стенды для испытаний амортизаторов
12
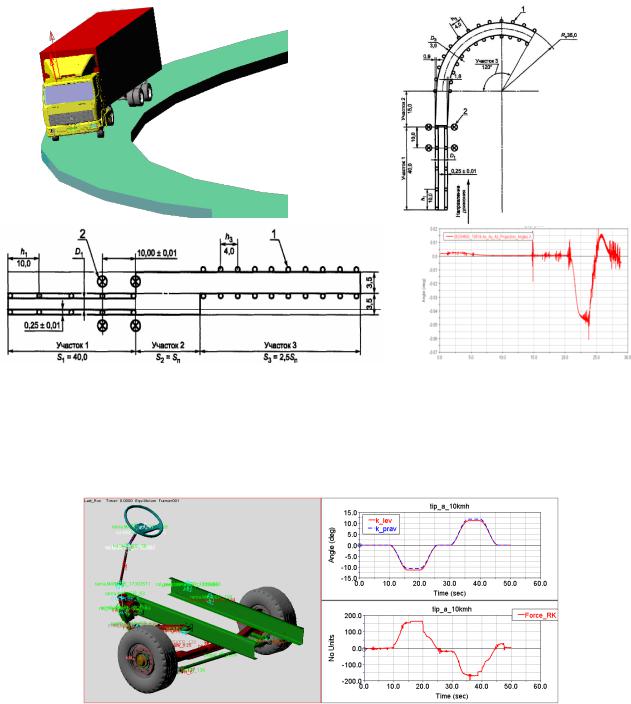
В соответствие с ГОСТ Р 52302-2004 (СТБ ГОСТ Р 52302-2006) «Автотранспортные средства. Управляемость и устойчивость. Технические требования. Методы испытаний» на базе разработанной в среде MSC.ADAMS полнокомплектной динамической модели среднетоннажного автопоезда проведен комплекс виртуальных испытаний по оценке параметров управляемости и устойчивости. В результате моделирования маневров «ПОВОРОТ» и «ПЕРЕСТАВКА» выявлены максимально возможные скорости устойчивого движения автопоезда (рис. 10). Сравнение полученных результатов с результатами экспериментальных исследований по определению критической скорости совершения маневра показывает, что отличие моделирования от эксперимента не превышает 7%.
Рис. 10. Виртуальные испытания «ПОВОРОТ» и «ПЕРЕСТАВКА»
Еще одним показателем оценки управляемости автомобиля в соответствии с вышеуказанным ГОСТом является оценка усилия на рулевом колесе. На рис. 11 показаны результаты виртуальных испытаний по оценке усилия на рулевом колесе, при переходе от прямолинейного движения к движению по окружности радиуса R=12 м со скоростью 10 км/ч.
Рис. 11. Виртуальные испытания «Усилие на рулевом колесе»
Результаты виртуальных испытаний поперечной статической устойчивости при «опрокидывании на стенде» приведены на рис. 12. При этом получены значения угла статической устойчивости против опрокидывания и угла крена подрессоренных масс.
13

Сравнение полученных результатов с результатами экспериментальных исследований показывает, что отличие результатов моделирования от эксперимента не превышает 5%.
Рис. 12. Виртуальные испытания «Опрокидывание на стенде»
Заключение
Применение современных технологии виртуальных испытаний автотракторной техники позволяют с достаточной точностью и в значительно короткое время произвести комплексную оценку показателей управляемости и устойчивости проектируемого образца автомобильной техники без его изготовления, при этом точность оценки его показателей, в зависимости от точности модели будет в пределах 5-10%, что является достаточно хорошим результатом и может быть рекомендована для практического применения в конструкторских отделах автомобильных заводов.
Библиографический список
1.Колесникович, А.Н. Виртуальные испытания транспортных средств на статическую устойчивость / А.Н. Колесникович, В.Б. Альгин, С.В. Харитончик // Повышение конкурентоспособности автотранспортных средств: сб. науч. тр. 2004. С. 229-233.
2.Выгонный, А.Г. Расчетная оценка поперечной устойчивости лесовозных автопоездов / А.Г. Выгонный, А.Н. Колесникович // Современные методы проектирования машин: респ. межведомств. сб. научн. тр. 2004. Вып. 2, Т. IV. С. 103–109.
3.Выгонный, А.Г. Компьютерное моделирование устойчивости и маневренности седельного
автопоезда |
/ |
А.Г. |
Выгонный |
// |
Автомобильная |
промышленность. |
2011. |
№7. С. 35–36.
4.Кончак, В.С. Способ получения динамических характеристик, необходимых для построения компьютерных моделей виброзащитных свойств кабины грузового АТС / В.С. Кончак // Автомобильная промышленность. 2011. № 4. С.33–35.
5.Кончак, В.С. Методы определения динамических характеристик упругих элементов подвески по экспериментальным данным / В.С. Кончак // Весцi НАН Беларусi. сер. фiз.-тэхн. навук. 2008.
№2. С. 20–25.
6.Кончак, В.С. Исследование динамических характеристик задней подвески многоосного автомобиля по экспериментальным данным / В.С. Кончак // Весцi НАН Беларусi. сер. фiз.-тэхн. навук. 2010. № 2. С. 46–51.
7.Высоцкий, М.С. Динамические модели элементов ходовой системы в пакете ADAMS для исследования динамики движения автомобиля-самосвала / М.С. Высоцкий // НИРУП «Белавтотракторостроение» Минск, 2003. 82с. - Деп. в ГУ «БелИСА» 09.08.2004, № Д200480
8.Vysotski M. Multibody simulation of curvelinear dynamics while engineering superlong highway multilink trucks / M. Vysotski // Proc. of FISITA 2010 World Automotive Congress. – Budapest, Нungary. 2010. 10 pp.
14
УДК 629.113
ОГРАНИЧЕНИЕ СКОРОСТИ ПРИ КРИВОЛИНЕЙНОМ ДВИЖЕНИИ С УЧЕТОМ НАКЛОНА ПЛОСКОСТИ КАЧЕНИЯ УПРАВЛЯЕМЫХ КОЛЕС
Красавин П.А., Лукьянов М.Н., Надеждин В.С. Университет машиностроения
Разработка современных интеллектуальных транспортных систем создает новые перспективные возможности повышения конструктивной безопасности автотранспортных средств (АТС), а, следовательно, безопасности дорожного движения в целом. По данным полиции удельный вес технических неисправностей в причинах дорожно-транспортных происшествий (ДТП) составляет 1-2%, поэтому создание систем помощи водителю и средств пассивной безопасности, несомненно, положительно сказывается на снижении числа погибших и пострадавших в ДТП.
Движение АТС по криволинейной траектории, сопровождающееся действием боковых возмущений, представляет значительную опасность, связанную с возникновением критических ситуаций. По данным статистики 65% ДТП происходит на закруглениях дорог,
итолько, следовательно, 35% ДТП имеют место на прямолинейных участках. Неустойчивое движение на криволинейной траектории чревато потерей АТС управляемости, устойчивости
иопрокидыванием, что является причиной тяжелых последствий ДТП.
При движении по криволинейной траектории, в зависимости от кинематики рулевого управления и подвески АТС, возможно изменение угла наклона плоскости качения управляемых колес, что оказывает влияние на показатели устойчивости и управляемости. Однако в литературе данный факт практически не находит отражение. Рассмотрим несколько схем АТС при движении на повороте (рис.1). Независимо от изменения углов наклона плоскостей качения колес, вследствие боковой податливости шин, происходит смещение пятна контакта колес с опорной поверхностью на величину hy (см. рис. 1, а,б,в). Данное смещение оказывает влияние на устойчивость АТС против опрокидывания, уводные характеристики и износ шин. В случае появления наклона плоскостей качения управляемых колес (см. рис. 1, б,в), помимо смещения пятна контакта от боковой податливости шин, появляется смещение пятна контакта колес с опорной поверхностью hγ, вследствие самого наклона колес. Сумма или разность рассмотренных смещений напрямую оказывает влияние на уводные характеристики и износ шин, устойчивость против опрокидывания и заноса, управляемость АТС. Поэтому учет наклона плоскостей качения управляемых колес при создании математических моделей движения АТС на повороте, видится авторам целесообразным.
Как уже отмечалось выше, при криволинейном движении происходит 65% от числа всех ДТП. Основными причинами ДТП являются: выезд на встречную полосу движения, т.е. потеря управляемости; опрокидывание и занос АТС, что связано с устойчивостью АТС. Каждая из причин связана с превышением предельной скорости прохождения маневра по критерию устойчивости или управляемости. Говоря другими словами, существуют предельные скорости прохождения поворота по управляемости, заносу и опрокидыванию. Ограничение скорости АТС минимальным значением из трех указанных обеспечит безопасное движение по криволинейной траектории. Поэтому разработка автоматического устройства регулирования скорости АТС при криволинейном движении позволит создать новую возможность повышения безопасности дорожного движения.
Рассмотрим пример алгоритма реализации работы автоматического устройства регулирования скорости движения АТС при криволинейном движении.
Первый этап. На первом этапе создается математическая модель движения АТС по криволинейной траектории с учетом крена подрессоренных масс, увода шин и изменения угла наклона плоскости качения управляемых колес. Выводятся аналитические выражения для определения силовых факторов в пятне контакта колес с опорной поверхностью, увода
15

шин, угла наклона управляемых колес в зависимости от параметров движения АТС по криволинейной траектории. При этом силовые факторы определяются из уравнений равновесия при известных конструктивных параметрах АТС. Уводные характеристики шин учитываются с использованием деформационной гипотезы. Изменение углов наклона плоскостей качения управляемых колес определяется кинематикой рулевого управления и подвески АТС.
Рис. 1. Схема АТС при движении по криволинейной траектории
Второй этап. Используя полученные на первом этапе аналитические зависимости, определяются предельные скорости движения АТС по криволинейной траектории для трех случаев: потеря управляемости (выезд на встречную полосу движения), начало опрокидывания АТС и занос АТС, после чего определяется минимальное значение предельной скорости при данных параметрах криволинейного движения. Математически это условие можно выразить в виде:
|
V zanos |
|
|
|
|
|
max |
|
|
V |
max V oprokidivanie |
, |
(1) |
|
max |
|
max |
|
|
|
|
upravlyaemost |
|
|
|
Vmax |
|
|
|
где Vmaxzanos - предельная скорость движения АТС по криволинейной траектории с точки зрения заноса; Vmaxoprokidivanie - предельная скорость движения АТС по криволинейной траектории с точки зрения опрокидывания; Vmaxupravlyaemost - предельная скорость движения АТС по криволинейной траектории с точки зрения управляемости (выезд на встречную полосу).
16
При этом в качестве входных параметров можно обойтись текущей скоростью движения и радиусом поворота. Оба входящих параметра легко установить с помощью спидометра и угла поворота рулевого колеса АТС.
Третий этап. На третьем этапе бортовой компьютер подает сигнал управляющему механизму (тормозной системе) о снижении скорости движения АТС до необходимой, с точки зрения безопасности, величины.
Стоит отметить, что первый этап проводится при проектировании новой модели АТС
итребует создания верифицированных математических моделей. Программирование второго
итретьего этапов в бортовом компьютере современного АТС не видится авторам неразрешимой задачей.
Реализация второго и третьего этапов возможна с помощью бортового компьютера и тормозной системы современного АТС. Расчет предельных скоростей движения АТС для рассмотренных случаев займет у современного бортового компьютера миллисекунды, после чего будет дан сигнал на тормозной механизм о принудительном снижении скорости. При такой постановке от конструкторов не требуется установка нового дополнительного оборудования. Все входящие сигналы (скорость движения и радиус поворота АТС) могут быть определены с помощью спидометра и угла поворота рулевого колеса. В качестве исполнительного механизма используется рабочая тормозная система, на которую подается сигнал о торможении от бортового компьютера.
Таким образом, из вышесказанного можно сделать вывод: создание современного автоматического устройства ограничения скорости при движении по криволинейной траектории является перспективным направлением создания интеллектуальных систем АТС. При проектировании и создании математических моделей для реализации предложенного алгоритма необходимо учитывать крены как подрессоренных, так и неподрессоренных масс АТС, что будет способствовать получению более точных результатов.
Несомненно, разработка предложенной интеллектуальной системы поможет обеспечить повышение уровня безопасности движения и, тем самым, снизить количество ДТП, происходящих при движении по криволинейной траектории, что подтверждает актуальность и перспективность дальнейших исследований в предложенном направлении.
УДК 629.113
СРАВНИТЕЛЬНАЯ ОЦЕНКА МОДЕЛИРОВАНИЯ И ДОРОЖНЫХ ИСПЫТАНИЙ УПРАВЛЯЕМОСТИ И УСТОЙЧИВОСТИ АВТОБУСА
Костин С.Ю., Мусарский Р.А.
Нижегородский государственный технический университет им. Р.Е. Алексеева
В настоящее время наиболее актуальным является вопрос использования и совершенствования транспортных интеллектуальных систем активной безопасности, направленных на минимизацию ошибок, допускаемых водителем. К наиболее распространенным таким системам относятся системы электронного контроля устойчивости (ЭКУ), препятствующие возникновению заносов и опрокидываний. На сегодняшний день оценка свойств активной безопасности, в том числе и при сертификации, проводиться по результатам дорожных испытаний. В тоже время на этапе проектирования довольно часто возникает необходимость анализа различных вариантов конструкций транспортных средств (ТС) и выбора наиболее рационального решения, обеспечивающего оптимальные параметры ТС. В этой связи с целью сокращения материальных и временных затрат целесообразно применение компьютерного моделирования при оценке свойств активной безопасности.
Необходимо отметить, что новая редакция правил ЕЭК ООН №13 (Пересмотр 6 - Поправка 1) предусматривает регламентацию особых требований к транспортным средствам, оснащенных функцией обеспечения устойчивости транспортного средства (добавление 12,
17

приложение 21). В соответствии с текстом документа, эффективность функции контроля траектории движения и/или устойчивости к опрокидыванию механических транспортных средств и прицепов категорий M, N и О может быть определена при помощи компьютерного моделирования, которые рассматриваются как альтернатива динамического маневрирования. При этом аттестация применяемых средств моделирования должна быть проведена на основе сопоставлений результатов расчетов с данными реальных испытаний транспортного средства.
Более того, компьютерное моделирование позволяет проводить оценку наиболее важных и интересных, с точки зрения научного и практического подхода, критических режимов движения ТС.
а) |
б) |
Рис. 1. Математическое моделирование а - модель автобуса; б - траектория входа в поворот со скольжением
Натурными испытаниями автобуса выявляется предельная скорость, позволяющая осуществлять поворот с радиусом 35 метров. Дальнейшее увеличение скорости не позволяет осуществлять заданную траекторию из-за скольжения колѐс. Однако натурные испытания не позволяют выявить, как и в каком порядке колѐса начинают скользить. Полную картину скольжения колѐс при подходе к критической скорости позволяет осуществить моделирование входа в поворот на пространственной математической модели (Рис.1а)
Системы координат.
Для вывода уравнений движения был введѐн ряд систем координат: неподвижная и ряд подвижных [1,2]. Введены следующие обобщенные координаты, однозначно определяющие состояние системы:
, - углы продольного и поперечного
крена кузова; угол между продольной осью экипажа |
и осью |
|
(угол курса); - |
расстояние от центра i-го колеса до опорной плоскости |
; |
угол, который образует |
|
продольная главная ось эллипсоида инерции кузова с плоскостью |
; |
угол поворота |
|
плоскости правого переднего колеса.
Взаимодействие колес с дорогой.
Для описания взаимодействия колес с дорогой сделано предположение, что колеса снабжены упругим пневматиком, обладающим свойством бокового увода и продольным псевдоскольжением (крипом) [2].
Нелинейная зависимость силы бокового увода  от увода
от увода  (где
(где  и
и  -
-
поперечная и продольная составляющие точки |
пятна контакта i-го колеса с дорогой) была |
аппроксимирована выражением: |
где f - коэффициент трения |
скольжения колес об опорную поверхность, |
- нормальное давление колеса на опорную |
поверхность. При малых значениях увода W эта зависимость аппроксимирует линейный увод
18

 , а при больших значениях увода эта зависимость аппроксимирует переход от качения эластичного колеса к скольжению. При этом предельное значение боковой силы равно
, а при больших значениях увода эта зависимость аппроксимирует переход от качения эластичного колеса к скольжению. При этом предельное значение боковой силы равно 
Уравнения движения.
Уравнения движения получены на основе уравнений Лагранжа второго рода [1,2]. Уравнение по вертикальной координате центра подрессоренной массы:
Уравнение по углу продольного крена
Уравнение по углу поперечного крена
Уравнение по углу курса
Уравнение поперечного перемещения
Моделирование входа в поворот.
Приведѐм результаты моделирования входа в поворот при скорости движения, приближающейся к критической (Рис. 1б).
Вход в поворот при скорости 14,5 м/сек (несколько меньше критической), равной
15,14 м/сек = 54,05 км/час. Угол поворота управляемых колѐс 0,24 радиана. Левые колѐса внутренние по отношению к центру поворота.
1)До (x = 4.35 m; y=0.65 m) скользят оба передних колеса,
2)От (x = 4.35 m; y=0.65 m) до (x = 8.66 m; y=1.29 m) скользят все колѐса,
3)От (x = 8.66 m; y=1.29 m) до (x = 23.49 m; y=10.28 m) скользят передние и попеременно (то одното другое) заднее правое и заднее левое,
4)От (x = 23.49 m; y=10.28 m) до (x = 28.65 m; y=17.38 m) скользят передние и попеременно (то скользит – то не скользит) заднее левое,
5)От (x = 28.65 m; y=17.38 m) до (x = 30.83 m; y=42.96 m) скользят переднее правое попеременно, переднее левое и заднее левое,
6)От (x = 30.83 m; y=42.96 m) до конца поворота скользят переднее левое и заднее левое.
Критическая скорость 15,14 м/сек= 54,05 км/час. Выше этой скорости модель в поворот не вписывается.
Угол поворота управляемых колѐс 0,24 рад.
а) До (x = 4.55 m; y=0.66 m скользят оба передних колеса, б) После (x = 4.55 m; y=0.66 m скользят все колѐса).
В настоящее время существует широкий спектр компьютерных программ,
позволяющих имитировать различные условия движения автомобиля и воспроизводить алгоритмы работы интеллектуальных систем активной безопасности. Одной из таких программ является SDK-Simulation, используемая в практике научно-исследовательского центра компании Кнорр-Бремзе (Будапешт, Венгрия). Данная программа обладает значительным функционалом и обеспечивает высокоточное моделирование условий движения различных категорий транспортных средств [3].
Для имитации условий движения испытания «поворот» в соответствии с требованиями нормативного документов был разработан виртуальный участок дорожного полотна (рис. 2).
19