

новая папка / БЕЗОПАСНОСТЬ ТРАНСПОРТНЫХ СРЕДСТВ В ЭКСПЛУАТАЦИИ
.pdf3) фазовое запаздывание. Экспериментально было определено, что предельное запаздывание составляет 0.75π, если запаздывание больше, то машина теряет управляемость. При расчете ФЧХ учитывается податливость гусениц, потому что при движении в повороте, рабочая ветвь опережающей гусеницы состоит из 6-7 траков, а на отстающем борту рабочая ветвь становится в 7 раз больше, и соответственно увеличивается податливость. Из-за этого и происходит запаздывание курсового угла и угловой скорости.
Эти факторы влияют на общую подвижность ГМ.
Существующие ограничения скорости и управляемости были уменьшены введением корректирующего устройства – интегрирующего звена. В такой системе сигнал на выходе содержит составляющие, пропорциональные рассогласованию и интегралу от рассогласования. Однако введение интегрирующего звена в закон управления уменьшило устойчивость системы автоматического регулирования и увеличило запаздывание в действии результирующего сигнала (поворачивающего момента). Для сокращения запаздывания в закон регулирования были введены одновременно и производная рассогласования, то есть был синтезирован ПИД-регулятор.
Параметры регулятора были рассчитаны для типового процесса с 20%- перерегулированием, который распространѐн в рамках САУ и даѐт наилучшие результаты при управлении большинством технических систем. В соответствии с результатами исследования был синтезирован ПИД-регулятор, осуществляющий коррекцию управления движением. В ходе экспериментальной проверки его эффективности было установлено, что прирост производительности происходит только при движении по извилистым дорогам с хорошим сцеплением. Кроме того, в регуляторе не учитываются вариации параметров ГМ, что также уменьшает его эффективность.
Среди направлений повышения эффективности системы управления движением были выделены следующие:
1)модификация регулятора с целью повышения эффективности его работы;
2)определение типа движения, и разделение системы регулирования для типов движения по прямолинейной траектории и в процессе поворота;
3)коррекция коэффициентов ПИД-реглятора в процессе движения ГМ.
Синтез системы управления движением бгм на основе нейронных сетей
Нейронная сеть – это громадный распределѐнный параллельный процессор, состоящий из элементарных единиц обработки информации, накапливающих экспериментальные знания и предоставляющих их для последующей обработки.
Совершенно очевидно, что свою силу нейронные сети черпают, во-первых, из распараллеливания обработки информации и, во-вторых, из способности самообучаться, т.е. создавать обобщения. Под термином обобщение понимается способность получать обоснованный результат на основании данных, которые не встречались в процессе обучения. Эти свойства позволяют нейронным сетям решать сложные (масштабные) задачи, которые на сегодняшний день считаются трудноразрешимыми. Однако на практике при автономной работе нейронные сети не могут обеспечить готовые решения. Их необходимо интегрировать в сложные системы. В частности, комплексную задачу можно разбить на последовательность относительно простых, часть из которых может решаться нейронными сетями.
В контексте данной работы полезными для применения свойствами нейронных сетей будут следующие[4]:
1.Нелинейность.
2.Отображение входной информации в выходную.
3.Адаптивность.
4.Очевидность ответа.
5.Отказоустойчивость.
6.Единообразие анализа и проектирования.
На основании результатов исследования возможности создания метода применения аппарата нечѐткой логики в системах управления быстроходных гусеничных машин для
120
повышения быстроходности и управляемости в процессе прямолинейного движения и поворота был сформулирован круг задач, которые возможно реализовать на базе искусственных нейронных сетей[2]:
1.Реализация адаптивного ПИД-регулятора на базе нейронных сетей;
2.Создание системы подстройки коэффициентов ПИД-регулятора (Кп, Ти, Ки, Тд, Ид) в реальном времени;
3.Введение в систему блока определения типа движения (прямолинейное/поворот) для разделения типов их коррекции;
4.Создание системы индивидуальной настройки управления гусеничной машиной.
При прямолинейном движении необходимо в первую очередь компенсировать
случайные отклонения, вызванные высокочастотными вибрациями и непостоянством характеристик внешних условий.
В зависимости от типа движения у ПИД-регулятора будут меняться коэффициенты (Kп, Ти, Тд). Первоначально предполагается определять тип движения только по изменениям угла поворота штурвала в течение заданного временного интервала. В дальнейшем предполагается дополнить данные для определения информацией об угловой скорости и ускорении.
Распознавание образов формально определяется как процесс, в котором получаемый образ/сигнал должен быть отнесен к одному из предопределенных классов (категорий). Чтобы нейронная сеть могла решать задачи распознавания образов, ее сначала необходимо обучить, подавая последовательность входных образов наряду с категориями, которым эти образы принадлежат. После обучения сети на вход подается ранее не виденный образ, который принадлежит тому же набору категорий, что и множество образов, использованных при обучении. Благодаря информации, выделенной из данных обучения, сеть сможет отнести представленный образ к конкретному классу. Распознавание образов, выполняемое нейронной сетью, является по своей природе статистическим. При этом образы представляются отдельными точками в многомерном пространстве решений. Все пространство решений разделяется на отдельные области, каждая из которых ассоциируется с определенным классом. Границы этих областей как раз и формируются в процессе обучения. Построение этих границ выполняется статистически на основе дисперсии, присущей данным отдельных классов.
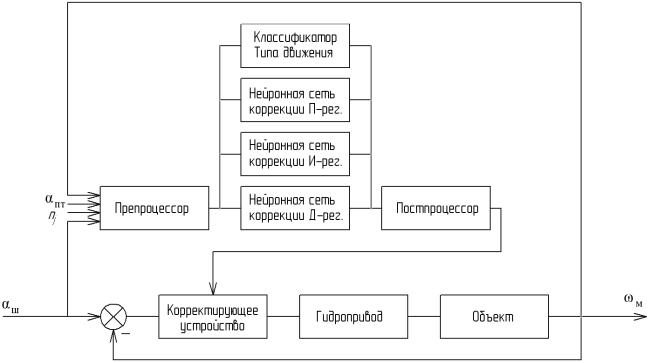
Для идентификации типа движения на данный момент, было решено использовать самоорганизующиеся карты Кохонена, которые, среди нейросетей, лучше всего подходят для распознавания при неполном или зашумлѐнном наборе входных данных[3]. В соответствии с этим была синтезирована структура адаптивной системы управления с применением нейронной сети классификации типа движения (рис. 1). Для определения типа и характеристик движения в данный момент времени на препроцессор подаются данные об угле поворота штурвала, гусеничной машины, педали подачи топлива и частоте вращения вала двигателя. После обработки эти данные поступают на нейронные сети, и производится определение величин корректировки отдельных коэффициентов регулятора, а также параметры его работы в соответствии с конкретным типом движения. Полученная информация анализируется постпроцессором на предмет наличия ошибок и подаѐтся на корректирующее устройство.
Рассматриваются два принципиально отличных подхода к построению нейросетевых систем управления[1]:
Прямые методы синтеза – регулятор реализуется на нейросети.
Косвенные методы синтеза – нейросеть используется в качестве модели объекта управления, а синтез регулятора осуществляется традиционным методом.
Нами используется процесс прямого метода реализации ПИД-регулятора на базе нейронных сетей.
Среди всех типов нейронных сетей была выбрана структура многослойного персептрона с нелинейной передаточной характеристикой. Количество слоѐв выбирается
121
равным двум – один скрытый и один выходной, так как такой структуры достаточно для аппроксимации любой функции[4].
Первоначальные попытки моделирования регулятора целиком оказались малоэффективным (корреляция ~0.65), в следствие чего были произведены попытки построения отдельных его компонентов, как самостоятельных нейросетей.
Рис. 1. Адаптивная система управления
В таблице 1 показаны наилучшие результаты синтеза регуляторов, состав нейронных сетей и функции активации их слоѐв.
Таблица 1
Характеристики нейросетевых моделей регуляторов
|
|
Кол-во |
Функция активации слоя |
Коэф. |
||
Тип |
Кол-во |
нейронов |
||||
|
|
|||||
|
|
Корре- |
||||
регулятора |
входов |
скрытого |
Скрытого |
Выходного |
||
ляции |
||||||
|
|
слоя |
||||
|
|
|
|
|||
|
|
|
|
|
||
П-рег. |
1 |
2 |
Гиперболический |
Линейная |
0.99 |
|
тангенс |
||||||
|
|
|
|
|
||
И-рег. |
1 |
4 |
Гиперболический |
Линейная |
0.92 |
|
тангенс |
||||||
|
|
|
|
|
||
Д-рег. |
5 |
5 |
Гиперболический |
Гиперболический |
0.91 |
|
тангенс |
тангенс |
|||||
|
|
|
|
|||
ПИД-рег. |
3 |
3 |
Гиперболический |
Гиперболический |
0.76 |
|
тангенс |
тангенс |
|||||
|
|
|
|
|||
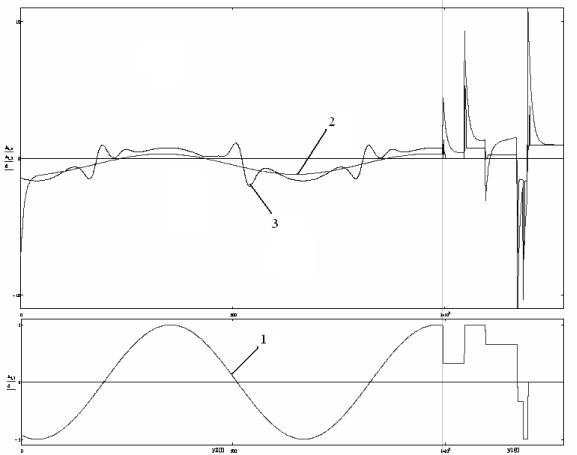
Промежуточные результаты моделирования: входной сигнал и выходные сигналы регулятора на базе жѐсткой логики и нейронных сетей, представлены на рис. 2.
В ходе выполнения работы был произведѐн анализ различной литературы по искусственным нейронным сетям и технических решений, реализованных с их применением. Были подробно изучены области применения и проведена оценка существующих решений.
Первоначальные построения моделей производились в программе VisSim, а предварительная обработка статистических данных и синтез нейросетей – MathCAD’е и STATISTIC’е соответственно. После получения первых синтезированных моделей
122
регуляторов и сравнения их сигналов с эталонами, из-за сложности реализации моделей систем автоматизированного управления с обратными связями и регуляторами, созданными на базе нечѐткой логики, был произведѐн переход на программное обеспечение MATLAB и Simulink.
В процессе дальнейшего моделирования производилось построение как регуляторов, рассчитанных по новым данным, так и – по данным, полученным при обучении в программе
STATISTICA.
Рис. 2. График сигналов моделирования:
1 – входной сигнал, 2 – сигнал ПИД-регулятора, 3 – суммарный сигнал нейронной сети
Витоге, были накоплены многочисленные нейросетевые решения, среди которых отбирались обладающие наиболее высоким соответствием выходного сигнала номинальному, а также – реализованные с применением минимального количества искусственных нейронов.
Входе данной работы были построены модели искусственных нейронных сетей, реализующих функции пропорционального, интегрального и дифференциального регуляторов. Также повышены коэффициенты их корреляции относительно предыдущих результатов. Сформирована структура, а также выбран тип нейронной сети для реализации системы идентификации типа движения.
Кроме того, определена компонентная база для физической реализации построенных моделей регуляторов. Часть нейросетей была перестроена в соответствии с возможностями построения их на базе электрических элементов.
Проведена работа по созданию метода применения искусственных нейронных сетей для повышения быстроходности и управляемости в процессе прямолинейного движения и поворота.
Полученные в ходе выполнения работы результаты можно применить для построения отдельных элементов регулятора и дальнейших исследований по применению нейронных сетей в системах управления.
123
В дальнейшем, предполагается увеличить количество скрытых слоѐв нейронных сетей, реализующих функции интегрирования и дифференцирования для повышения качества их аппроксимации.
Библиографический список
1.Гаврилов, А.И. Методы робастного, нейро-нечѐткого и адаптивного управления / А.И. Гаврилов, Н.Д. Егупов, В.Ю. Зверев – Изд-во МГТУ им. Н.Э. Баумана, Москва, 2002г. – 744 с.
2.Карпов, Е.К. Система управления движением гусеничной машины ―Система подготовки специалистов в отраслевом вузе‖. – Курган, 2011г.
3.Уоссермен, Ф. Нейрокомпьютерная техника: Теория и практика / Ф. Уоссермен. – М.: Мир,
1992. – 184 с.
4.Хайкин, С. Нейронные сети: полный курс, 2-е издание / С. Хайкин. – М.: Издательский дом
―Вильямс‖, 2006. – 1104 с.
УДК 629.1.032.001
РАСПРЕДЕЛЕНИЕ МОЩНОСТИ В ТРАНСМИССИИ АВТОМОБИЛЯ УПРАВЛЯЕМОЙ МНОГОДИСКОВОЙ ФРИКЦИОННОЙ МУФТОЙ
Дидиков Р.А.
Санкт-Петербургский государственный политехнический университет
Исследуя тенденции развития современного автомобилестроения, можно увидеть, что производители стремятся достичь максимального контроля над механизмами распределения мощности (МРМ) в полноприводных автомобилях. Немаловажную роль играет также проблема оптимального распределения крутящих моментов между ведущими колесами автомобиля. Исследование подобных вопросов в дальнейшем позволит синтезировать активные системы безопасности автомобиля на базе полученных математических моделей.
Всѐ более актуальным и целесообразным является использование различных систем полного привода. Распределение тягового усилия на все колеса позволяет использовать весь вес автомобиля в качестве сцепного, что положительно сказывается на динамических качествах автомобиля, проходимости, и позволяет реализовать алгоритмы управления, улучшающие управляемость и курсовую устойчивость автомобиля.
Медленное развитие подобных систем в отечественном автомобилестроении является причиной недостаточных исследований распределения мощности в специфических условиях движения, характерных для легковых полноприводных автомобилей. Недостаточно полно разработаны инженерные методы расчета коэффициента блокировки современных МРМ.
Цель исследования – разработать методологическую базу для анализа и расчѐта управляемого с помощью широтно-импульсной модуляции (ШИМ) МРМ на основе многодисковой фрикционной муфты.
Для достижения этой цели требуется решить следующие задачи.
1.Выполнить анализ существующих статистических данных описывающих дорожные условия по коэффициенту сопротивления движению.
2.Разработать динамическую модель движения автомобиля на основе полученной статистики.
3.Исследовать возможные способы распределения мощности МРМ на основе многодисковой фрикционной муфты.
4.Провести анализ существующих методов управления МРМ.
5.Исследовать возможные методы компенсации силового воздействия на автомобиль с помощью систем управления МРМ.
6.Оценить применимость широтно-импульсной модуляции давления в бустере фрикционного элемента управления МРМ.
124
7.Установить параметры рационального распределения мощности и диапазоны значений.
Объектом исследования является трансмиссия легкового автомобиля с МРМ, распределяющим мощность между осями автомобиля.
Оценка преимуществ и недостатков различных принципов управления показала на целесообразность использования электронных систем, имеющих высокую надежность и значительно расширяющих возможности управления, позволяющих реализовать превентивные системы безопасности.
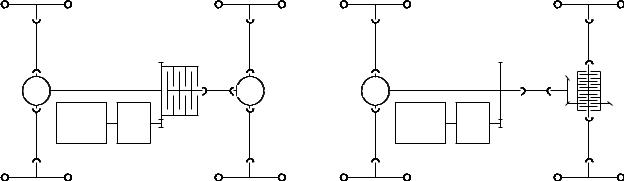
Подобного рода механизмы выпускает шведская фирма «Haldex», создавшая одноименный механизм распределения мощности между осями легкового автомобиля [1]. Основой такого механизма является многодисковая фрикционная муфта, установленная в один узел вместе с блоком управления. Данный механизм используется на легковых автомобилях, трансмиссия которых в основное время обеспечивает привод на передние колеса и позволяет перераспределять часть мощности двигателя на задние колеса. На рис. 1. приведены варианты схемы трансмиссии с использованием многодисковой фрикционной муфты.
|
|
РМ |
|
|
ГП+Д |
|
ГП+Д |
ГП+Д |
РМ |
|
|
|||
ДВС |
ТМ |
|
ДВС |
ТМ |
Рис. 1. Варианты схемы трансмиссии с использованием фрикционной муфты в качестве раздаточного механизма: ГП+Д – главная передача и дифференциал; ДВС – двигатель внутреннего сгорания; ТМ – трансформирующий механизм; РМ – раздаточный механизм
Муфта представляет собой узел, в котором имеется набор фрикционных дисков, одна часть которых опосредованно соединена с карданным валом, а другая передает мощность непосредственно на ведущий вал передней главной передачи автомобиля. В зависимости от условий движения (определяющихся коэффициентами сцепления колес с дорогой, нагрузкой на оси), а также других параметров, мощность от двигателя перераспределяется между осями
всоотношении, обеспечивающем наилучшие тягово-цепные характеристики автомобиля.
Вотличие от МРМ, предлагаемых другими производителями, таких как дифференциал «Torsen», основанный на чисто механическом принципе и дающем возможность (в большинстве конструкций) распределять мощность в соотношении 50:50, многодисковая фрикционная муфта «Haldex» позволяет распределять мощность практически
влюбом соотношении [1].
Основой для изучения способов управления являются результаты работ, связанных с изучением характеристик ФЭУ, которые были начаты в Ленинградском Политехническом институте в 1981 г. [2]. В данных работах на математической модели были исследованы различные способы регулирования давления в бустерах бортовой коробки передач гусеничной машины и оценено качество управления поворотом транспортного средства, которое эти способы обеспечивают.
В публикациях [3,4], связанных с анализом работы механизмов распределения мощности рассматривается две схемы привода к ведущим колесам: дифференциальная и блокированная. Показано, что совмещение двух типов подвода мощности является наиболее предпочтительным с точки зрения обеспечения лучшей проходимости с одновременным сохранением остальных эксплуатационных свойств. Данным свойством обладает описанная
125
выше многодисковая фрикционная муфта с возможностью частичной блокировки. Также [3] была разработана математическая модель, учитывающая развесовку автомобиля, значения крутящих моментов на ведущих колесах, сопротивление движению со стороны грунта и силу сопротивления воздуха. Результаты этих исследований позволяют предположить возможность реализации аналогичных конструкций и систем управления в трансмиссиях легковых автомобилей.
Движение |
автомобиля |
в |
|
||||||
различных |
|
условиях |
движения |
|
|||||
приводит |
|
к |
|
непрерывному |
|
||||
изменению |
|
|
|
коэффициентов |
|
||||
сопротивления |
движению. |
В |
|
||||||
тяжелых условиях движения, или |
|
||||||||
при |
динамичном |
|
движении, |
|
|||||
происходит |
|
перераспределение |
|
||||||
реакций на колесах автомобиля, что |
|
||||||||
в свою очередь может привести к |
|
||||||||
потере подвижности. Для изучения |
|
||||||||
подобного |
рода |
условий |
движения |
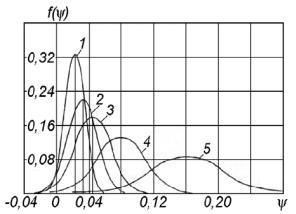
Рис. 2. Кривые плотности распределения |
|||||
требуется |
составить |
динамическую |
коэффициента Ψ для различных дорожных условий: |
||||||
модель |
|
движения |
автомобиля, |
1 – дороги с твердым покрытием; 2 – булыжное шоссе; |
|||||
основанную |
на |
статистических |
3 – грунтовая дорога удовлетворительного состояния; |
||||||
4 – разбитая грунтовая дорога; 5 – бездорожье |
|||||||||
данных. |
|
|
Подобного |
|
рода |
||||
|
|
|
|
||||||
статистические данные представляют собой кривые плотности распределения коэффициента сопротивления движению (рис. 2). Обработка экспериментальных данных показывает, что распределение коэффициента сопротивления движению по основным дорогам всех типов соответствует или приближается к нормальному закону [5]. Это позволяет характеризовать дороги по коэффициенту сопротивлению движению с вероятностных позиций.
Оценку динамического воздействия на автомобиль в повороте можно провести на базе системы уравнений:
Pjx
Pjy
M j
|
G |
|
dv |
|
|
|
|
v2 |
|
|
|
|
|
|
|||||||||||||
|
a |
|
|
|
|
|
|
|
L2 |
|
|
|
|
|
|
|
|
; |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||||||
|
g |
|
dt |
|
|
|
|
R |
|
|
|
|
|
|
|
|
|||||||||||
|
G |
|
v2 |
|
|
|
|
L |
|
|
|
dv |
|
|
L v |
||||||||||||
|
a |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
g |
|
|
R |
|
|
|
|
R |
|
|
|
dt |
|
|
|
L |
||||||||||
|
|
|
|
1 |
|
|
|
|
dv |
|
|
|
|
v |
|
|
|
|
|
|
R2 L2 |
||||||
J z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
R |
dt |
|
L |
|
|
|
|
R |
2 |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
L2 R2 |
d |
|
|||||
|
|
|
|
|
|
|
; |
||
|
|
2 |
|
||||||
|
|
R |
|
|
|
dt |
|
||
|
d |
|
, |
|
|
|
|
||
|
|
|
|
|
|||||
|
|
|
|
|
|||||
|
|
dt |
|
|
|
|
|
|
|
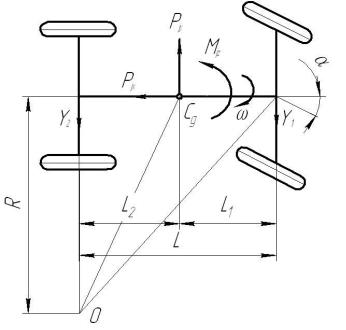
Здесь Pjx - продольная сила инерции; Pjy – поперечная сила инерции; M j – инерционный момент; v – окружная скорость центра масс автомобиля; Ga – полный вес
автомобиля; – угловая скорость поворота автомобиля; R – радиус поворота середины задней оси автомобиля; – средний угол поворота передних колес автомобиля; L – колесная база автомобиля.
Расчетная схема показана на рис. 3.
В исследовании предполагается учет бокового увода колес автомобиля, а также рассмотрение уравнений неустановившегося поворота автомобиля. Используя статистические данные (плотность распределения коэффициента сопротивления движению), можно составить динамическую модель для всего возможного спектра условий движения автомобиля по опорной поверхности. Эти данные могут быть использованы с целью оценки износа фрикционных элементов управления при различных условиях движения.
126
Изменение количества передаваемой мощности на оси автомобиля сводится к управлению скоростью пробуксовки фрикционного элемента управления (ФЭУ). Задача, в общем виде, состоит в том, чтобы создать такую систему автоматического управления, которая позволяла бы поддерживать, и динамически изменять коэффициент блокировки дифференциала в зависимости от условий движения.
В разрабатываемом механизме на основе фрикционной муфты управление распределение мощности достигается за счет управляемого буксования дисков. Контроль над буксованием предполагается получить путем использования широтно-импульсной модуляции давления (ШИМД) в системе управления муфтой.
Управляющий сигнал с широтноимпульсной модуляцией есть импульсный сигнал постоянной частоты и переменной скважности (то есть отношения периода следования импульса к его длительности). С помощью задания скважности импульсов управления соленоидом клапана гидравлической системы можно управлять давлением в бустере фрикционного элемента управления
(ФЭУ).
В работе [2] были исследованы математические модели непрерывных и релейных (дискретных) регуляторов давления в бустере ФЭУ. Исследования показали, что принципиально регулятор любого типа может обеспечить достаточно высокую точность
управления. Однако регуляторы непрерывного действия оказались очень чувствительными к выбору значений их параметров. На основании результатов исследований, решено отдать предпочтение дискретным системам, в частности системе с широтно-импульсной модуляцией давления.
В качестве причин такого выбора можно назвать следующие.
1.Управление скважностью импульса достигается значительно проще, чем частотой импульсов.
2.Изменение частоты импульса, в достаточно больших диапазонах может неблагоприятно сказываться на работе трансмиссии. На некоторых частотах
может происходить совпадение с собственной частотой элементов трансмиссии В связи с наличием длительного буксования муфты возникает вопрос о
прогнозировании износа фрикционных накладок с целью обеспечения заданного срока службы узла. Также рассматривается вопрос об определении оптимальных параметров ФЭУ с ШИМД для механизма распределения мощности в трансмиссии автомобиля. Также необходимо, чтобы работа системы управления муфты согласовывалась с работой системам активной безопасности автомобиля.
Задача оптимизации связанная с оптимизацией работы (ФЭУ) сводится к минимизации износа фрикционных накладок ФЭУ, и минимизации времени работы в неблагоприятных режимах буксования дисков.
Создание математической модели криволинейного движения автомобиля с последующей оценкой и анализом условий движения, таких как движение по покрытиям с низким коэффициентом сцепления, с ускорением в повороте и.т.д., выделить из всего
127
спектра возможных условий, максимально нагружающие фрикционный элемент управления муфты.
Это в свою очередь позволяет рассмотреть вопрос разработки системы управления постоянно буксующим фрикционным элементом управления муфты. Применение широтноимпульсной модуляции давления в системе управления является наиболее перспективным, для использования в исследуемом механизме. Полученные данные являются базисом для решения задачи оптимизации износа фрикционных накладок, что значительно повысит надежность конструируемого механизма, что является неотъемлемым требованием к агрегатам трансмиссии современных автомобилей.
Синтез системы автоматического управления позволит исследовать возможность применения систем динамической стабилизации на автомобиле, что значительно повысит уровень активной безопасности автомобиля.
Оба этих направления являются слабо изученными в современном автомобилестроении, и будут являться основой для дальнейшего развития, как систем полного привода, так и систем активной безопасности автомобиля.
Библиографический список
1.Электронный ресурс: http://www.avco.ru/static/mufta_haldex.html
2.Калинина, М.И. Исследование работы фрикционов в трехстепенных бортовых коробках передач ВГМ (в режиме поворота): отчет о НИР по теме 305112-38 / ЛПИ им.; руководитель А.В.Бойков. – инв. № Н-2202. – Л., 1983. – 98 с.
3.Синельник, Ю.В. Анализ работы механизмов распределения мощности /Р.Ю. Добрецов // XXXVI Неделя науки СПбГПУ: Материалы Всероссийской межвузовской научно-технической конференции студентов и аспирантов. Ч. II. СПб.: Изд-во Политехн. ун-та, 2008. 180 с. С. 101103.
4.Макаров, М.А. Исторический обзор развития механизмов управления распределением крутящего момента применительно к трансмиссиям автомобилей / А.Г. Семенов, В.А. Яхимович // XXXVI Неделя науки СПбГПУ: Материалы Всероссийской межвузовской научно-технической конференции студентов и аспирантов. Ч. II. СПб.: Изд-во Политехн. ун-та, 2008. 180 с.
5.Котович, С.В. Движители специальных транспортных средств. Часть 1: Учебное пособие/ МАДИ (ГТУ). – М., 2008. – 161 с.
6.Болгарский, А.И. Оптимизация управления фрикционными элементами гидромеханической трансмиссии транспортной машины/В.Б. Держинский, И.А. Тараторкин.// Известия Самарского научного центра Российской академии наук, т. 13, №4(3), 2011. с.974-976.
УДК 629.113
ИССЛЕДОВАНИЕ ФИЗИКО-МЕХАНИЧЕСКИХ СВОЙСТВ СНЕГА ДЛЯ ОЦЕНКИ ПРОХОДИМОСТИ МАШИН
Барахтанов Л.В., Блохин А.Н., Денисенко Е.Г. Нижегородский государственный технический университет им. Р.Е. Алексеева
В работе [1] указано, что оценки проходимости машин по снегу необходимо получить зависимость сил сопротивления движению от высоты снежного покрова. Известно, что глубина колеи, максимальные давления в контакте движителя с опорной поверхностью и коэффициент начальной жесткости снега, который с изменением плотности снега будет существенно меняться, определяют основную составляющую сопротивления движению по снегу Ffc [1-5]:
|
|
|
hmax |
|
qmax |
|
|
F fc 2b hmax2 |
|
ln |
|
|
|
|
(1) |
|
|
||||||
|
|
|
hmax qmax |
|
|
|
|
|
|
|
|
hmax qmax |
|
||
|
|
|
128 |
|
|
|
|
где b- ширина колеи; hmax - коэффициент, характеризующий величину деформации снега при нормальных давлениях, соответствующих максимальному уплотнению; qmax - максимальное нормальное давление в контакте колеса с опорной поверхностью; - начальная жесткость снега.
Кроме этого, в работе [1] установлено, что зависимость вертикальной деформации снега от нормальной нагрузки описывается выражением:
q (k e k2hmax ( H ) ) h(a1H b1 ) |
|
(2) |
||||
|
1 |
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
q |
|
|
|
|
|
|
|||||
|
a1H b1 |
|
||||
или: |
h |
|
|
|
|
(3) |
|
|
|
||||
|
|
(k1e k2hmax ( H ) ) |
|
|
|
|
где a1, b1, k1, k2, – коэффициенты аппроксимации, Н – глубина снега.
Подставляя выражения (2) или (3) в (1) можно определить силу сопротивления движения с учетом наиболее важных параметров снежного покрова: высоты H, плотности снега ρ и его начальной жесткости γ.
Упорная реакция грунта, от которой зависит сила тяги транспортного средства, определяется связностью и углом внутреннего трения, а выражение силы тяги можно записать в виде [2, 4]:
|
F T |
|
p k н R z (1 k н) Ak (C0 pср tg 0) 1 e |
SX |
|
(4) |
|
|
k |
||||
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
где FT |
- максимальная |
сила сцепления колеса с грунтом; p - коэффициент трения |
||||
|
x |
|
|
|
|
|
резины по снегу; k н - коэффициент насыщенности протектора; R z – вертикальная реакция опорной поверхности; Ak - площадь пятна контакта; pср - среднее давление в пятне
контакта; S- коэффициент буксования; X– расстояние от передней точки кромки опорной поверхности до рассматриваемой зоны буксования; k – коэффициент, характеризующий деформацию, требуемую для создания максимального напряжения сдвига.
Соотношение силы сопротивления движению и силы тяги транспортного средства определяют параметры проходимости и энергоэффективности транспортного средства. Однако, для определения показателей указанных свойств при движении по снегу необходимо учитывать следующие особенности.
Снег представляет собой совокупность фаз вещества одной природы, но разных агрегатных состояний. Снег как полотно пути есть сложная пространственная система, которая в топологическом плане определяется как полирельефная полизональная полислоистая полидисперсная среда. Оценку материалов, образующих поверхности движения, проводят по независимым параметрам. Под независимыми параметрами понимают такие физико-механические свойства материала, которые не зависят от способа их определения. Так для снега это: плотность, твердость, коэффициент жесткости, связность, фрикционные свойства, прилипание и примерзание, влажность, температуру, структуру и текстуру снега [3-4].
Множество экспериментальных исследований и наблюдений за последние 40 лет, проведенных сотрудниками отраслевой научно-исследовательской лаборатории вездеходных машин (ОНИЛВМ), научно-исследовательской лабораторией транспортных интеллектуальных систем (НИЛ ТИС) НГТУ и НОЦ «Транспорт» НГТУ, позволили собрать обширные сведения в областях, связанных с изучением свойств снежного покрова как полотна пути и взаимодействия движителя со снегом. В работе [3] были получены зависимости между механическими параметрами (коэффициент внутреннего трения, твердость, связность, коэффициент жесткости) и физическим параметром (плотность снега).
На основе новых экспериментальных данных установленные ранее зависимости были уточнены авторами статьи. Для описания взаимосвязи параметров снега предложены следующие регрессионные зависимости:
129