

3.7. Задания для выполнения расчетно-графической работы по теме «Плоскопараллельное движение твердого тела»
Условие:
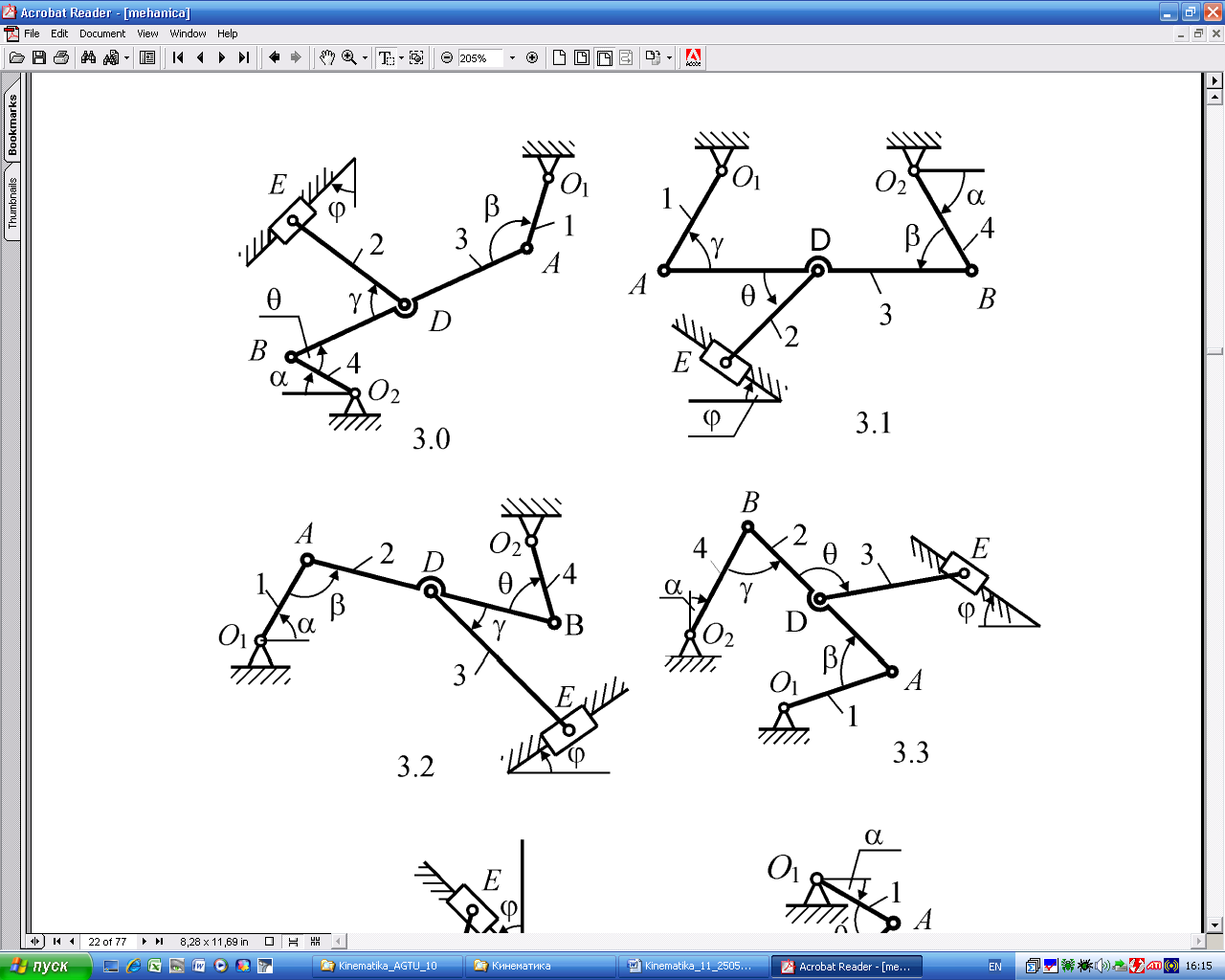
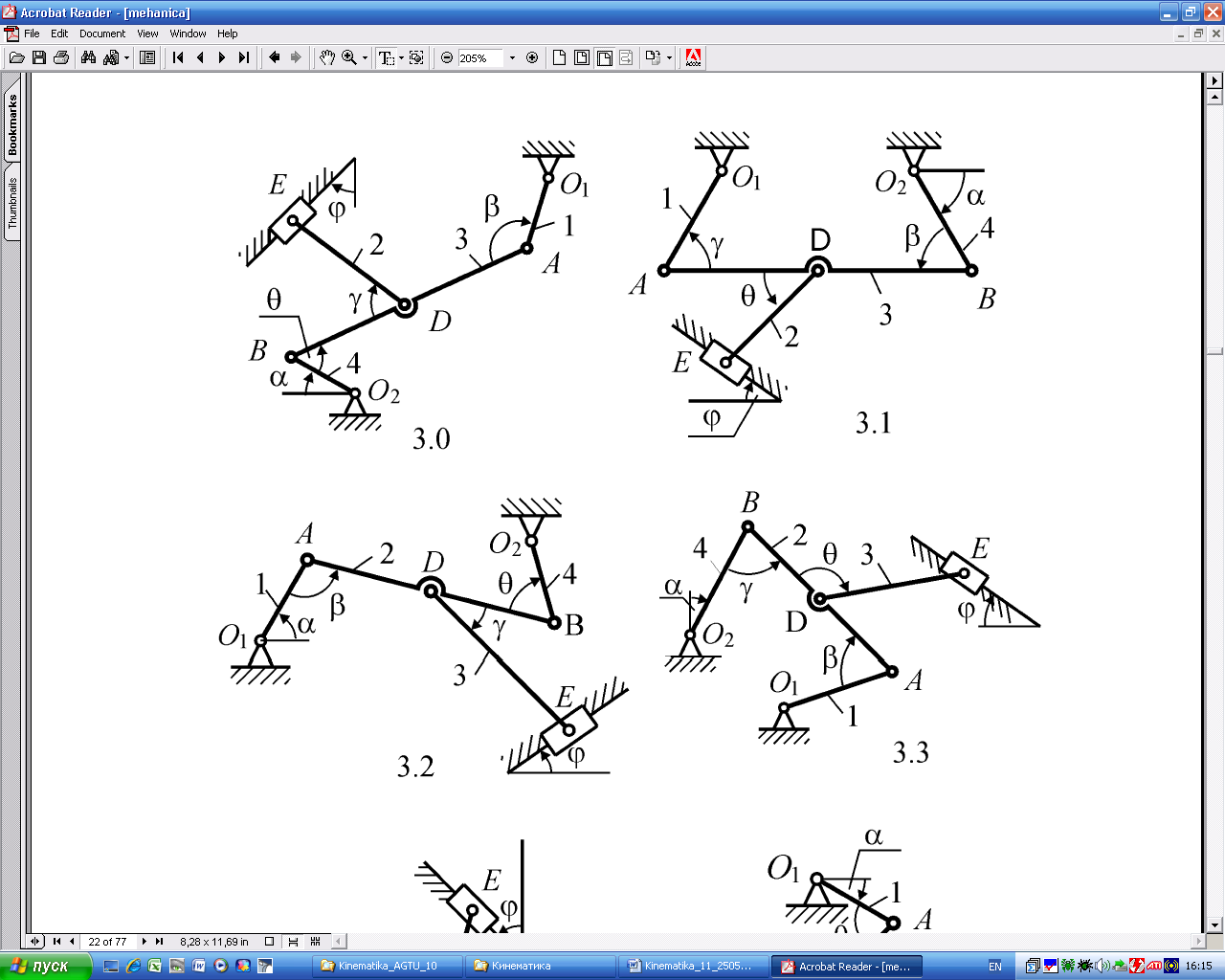
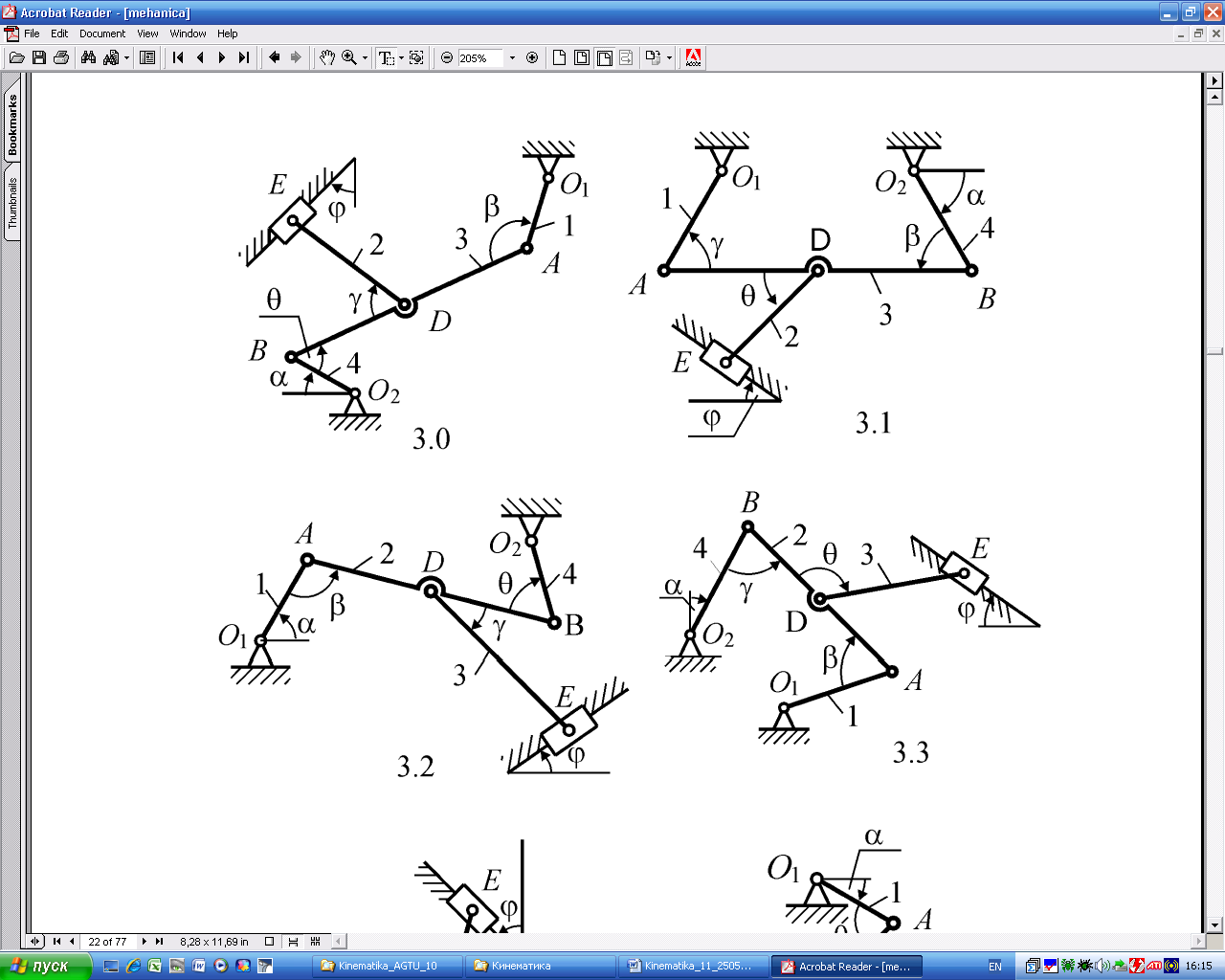
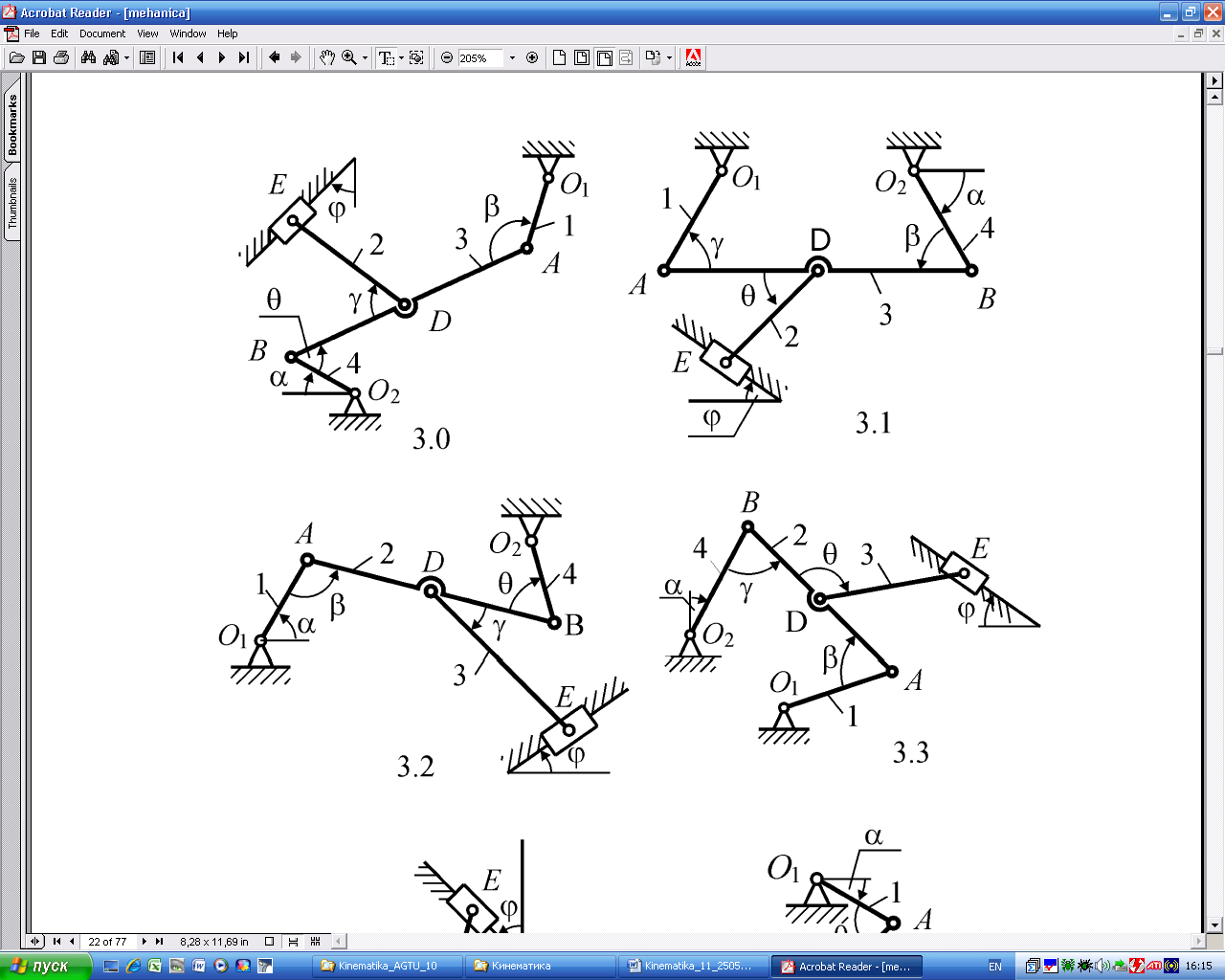
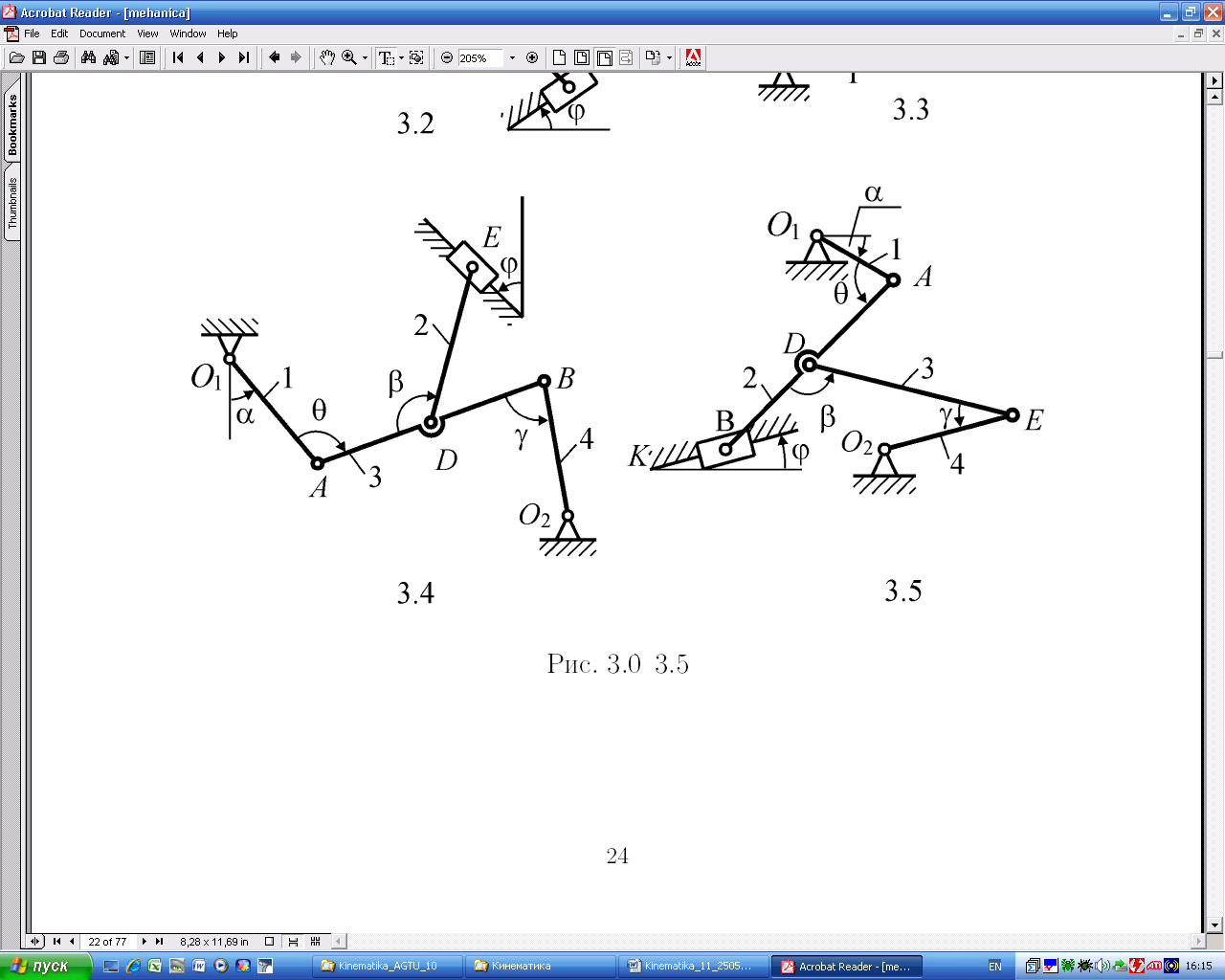
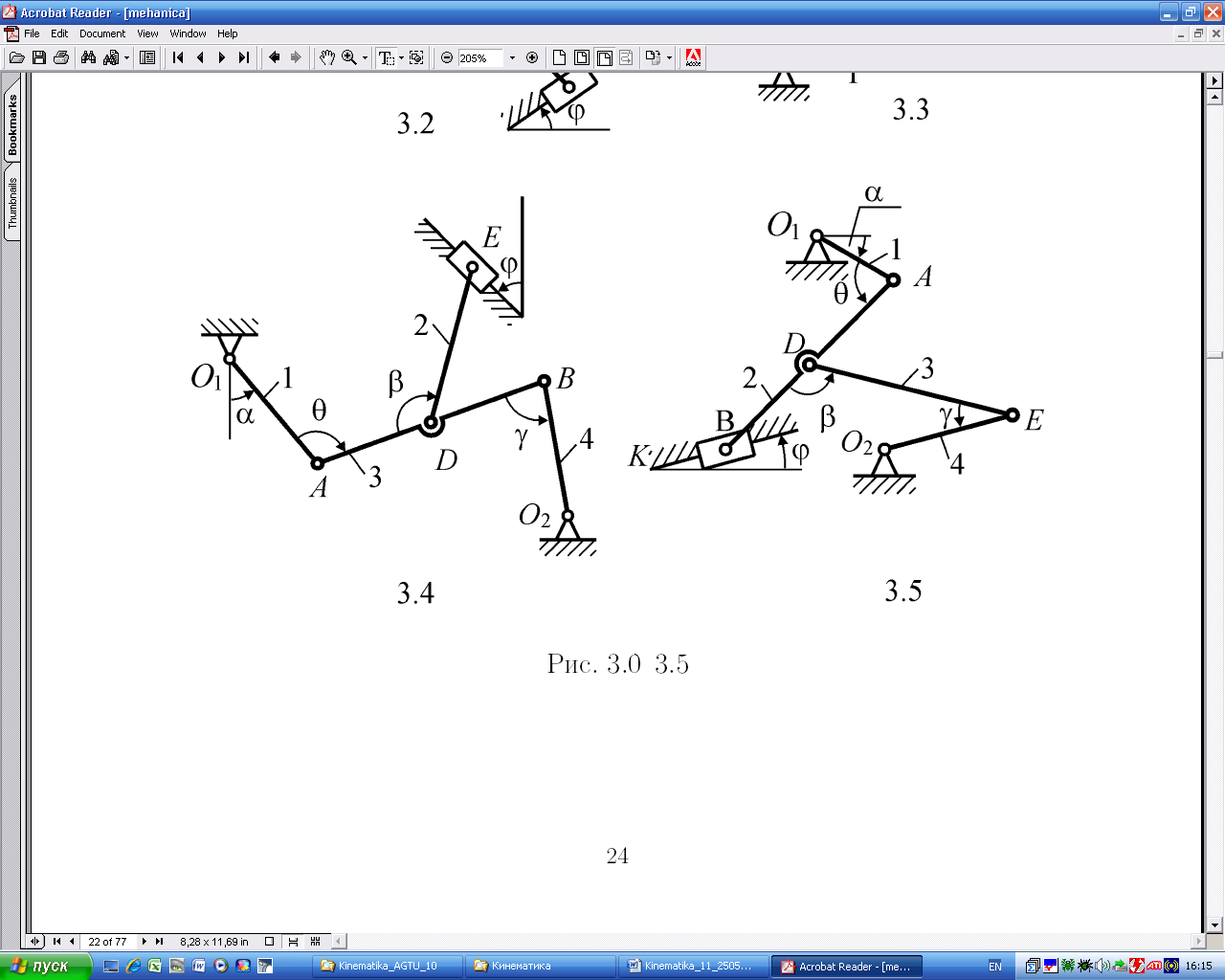
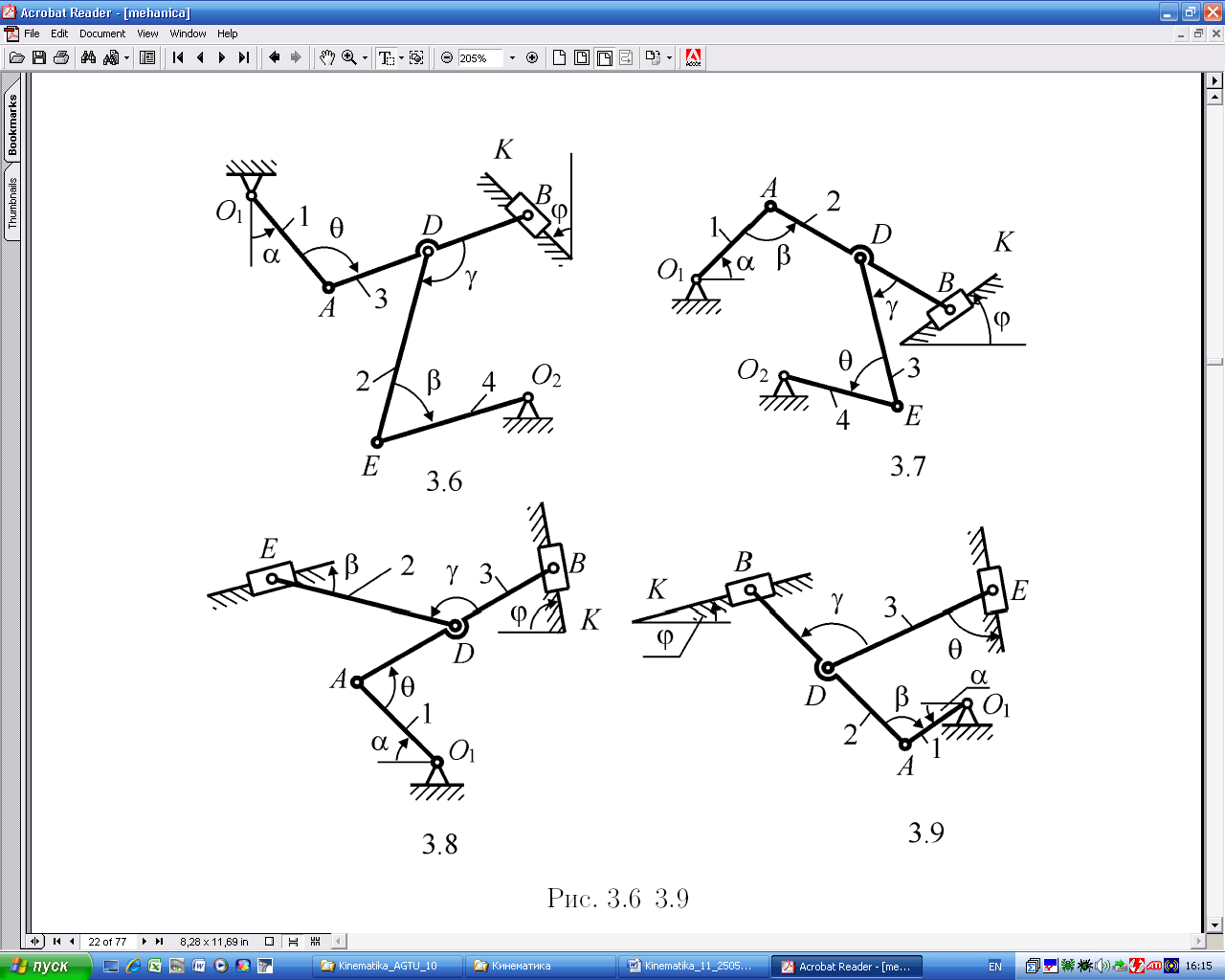
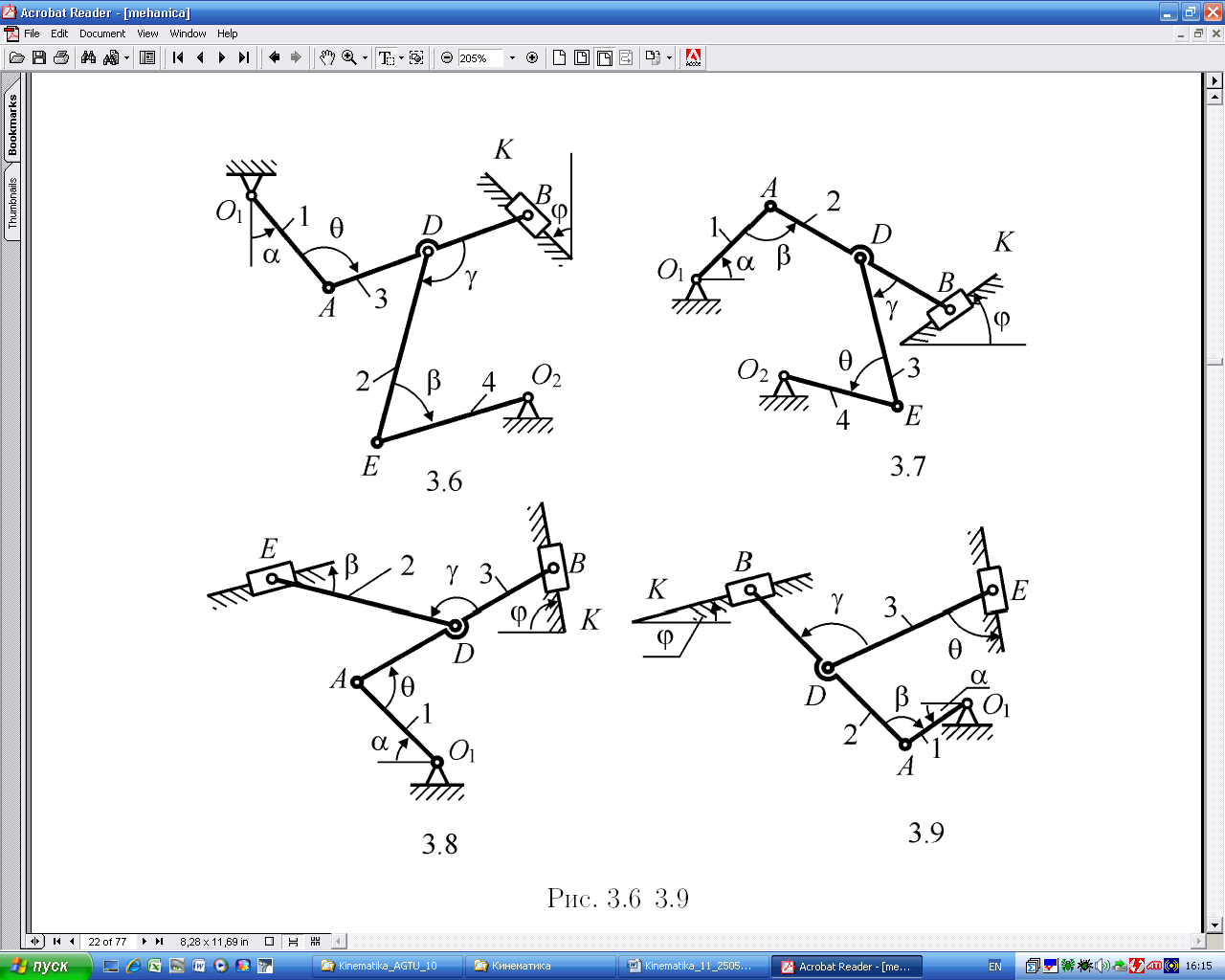
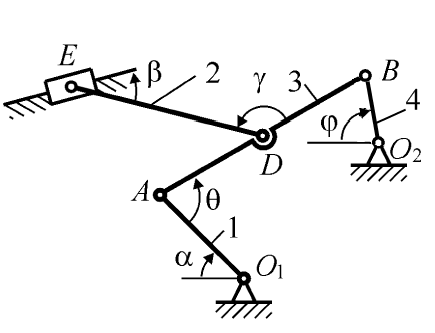
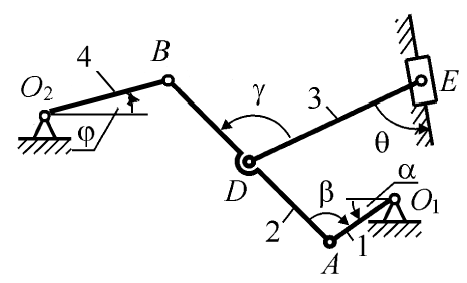
Плоский механизм состоит из стержней
1,
2,
3,
4
и ползуна B
или E
(табл. 13),
соединенных шарнирами друг с другом и
с неподвижными опорами O1,
O2;
шарнир D
находится в
середине стержня AB.
Длины стержней равны соответственно:
l1=0,4
м, l2=1,2
м, l3=1,4
м, l4=0,6
м. Угловое ускорение звена 1
в данный момент времени равно
![]() .Положительные
направления отсчета заданных угловых
скоростей и углового ускорения ε1
– против хода часовой стрелки.
.Положительные
направления отсчета заданных угловых
скоростей и углового ускорения ε1
– против хода часовой стрелки.
Положение
механизма определяется углами
![]() .
Значения этих углов и других заданных
величин указаны в табл. 12.
.
Значения этих углов и других заданных
величин указаны в табл. 12.
Определить
скорости всех точек механизма, обозначенных
буквами на схемах, угловые скорости
всех стержней и ускорение точки А
(если задана
![]() ),
или точкиВ
(если задана
),
или точкиВ
(если задана
![]() ),
а также угловое ускорение звенаАВ.
),
а также угловое ускорение звенаАВ.
Дуговые
стрелки на рисунках показывают, как при
построении чертежа должны откладываться
соответствующие углы (по ходу или против
хода часовой стрелки). Построение чертежа
необходимо начинать со стержня,
направление которого определяется
углом
![]() .
.
Таблица 12
Исходные данные
|
Номер |
Углы, град |
Дано | ||||||
|
строки |
рисунка |
|
|
|
|
|
|
|
|
0 |
0 |
0 |
60 |
30 |
0 |
120 |
6 |
|
|
1 |
1 |
90 |
120 |
150 |
0 |
30 |
|
4 |
|
2 |
2 |
60 |
150 |
150 |
90 |
30 |
|
5 |
|
3 |
3 |
30 |
30 |
60 |
0 |
150 |
4 |
|
|
4 |
4 |
90 |
120 |
120 |
90 |
60 |
|
6 |
|
5 |
5 |
90 |
120 |
120 |
0 |
60 |
|
5 |
|
6 |
6 |
90 |
150 |
120 |
90 |
60 |
3 |
|
|
7 |
7 |
0 |
60 |
60 |
0 |
120 |
|
2 |
|
8 |
8 |
60 |
150 |
120 |
90 |
30 |
2 |
|
|
9 |
9 |
30 |
120 |
150 |
0 |
60 |
|
8 |
Таблица 13
Схемы к заданиям
|
№ |
Схемы |
№ |
Схемы |
|
0 |
|
5 |
|
|
1 |
|
6 |
|
|
2 |
|
7 |
|
|
3 |
|
8 |
|
|
4 |
|
9 |
|





Методические указания
При выполнении задания необходимо изучить тему «Плоскопараллельное движение твердого тела».
При решении задания рекомендуется придерживаться следующей последовательности действий:
1) на чертеже изобразите механизм в том положении, в котором требуется определить его кинематические характеристики;
2) по данным задачи определите модуль и направление скорости одной точки звена механизма, совершающего плоскопараллельное движение, и направление скорости другой точки этого же звена;
3) определите линейные скорости точек звеньев механизма и угловые скорости звеньев, используя теорему о проекциях скоростей двух точек или понятие мгновенного центра скоростей этого звена;
4) найдите ускорение какой-нибудь точки звена, принимая ее в дальнейшем за полюс; при этом, если точка движется по окружности, то ее ускорение представьте геометрической суммой касательного и нормального ускорений;
5) запишите векторное равенство, являющееся аналитическим выражением теоремы об ускорениях точек тела при плоскопараллельном движении; при этом одна точка является полюсом, а другая – точкой, ускорение которой надо найти;
6) представьте искомое ускорение точки геометрической суммой касательного и нормального ускорений, если точка, ускорение которой определяется, движется по окружности;
7) проецируя обе части векторного равенства относительно ускорений указанных точек на прямую, проходящую через точки, и на прямую, перпендикулярную к ней, найдите требуемое ускорение точки и ее угловое ускорение по отношению к полюсу.
Примечание: В механизме, состоящем из нескольких звеньев, каждое звено, совершающее плоскопараллельное движение, имеет свой мгновенный центр скоростей и свою угловую скорость в данный момент времени.