

1.2. Способы задания движения точки
Существует три способа задания движения точки:
векторный;
координатный;
естественный.
1.2.1. Векторный способ задания движения
Пусть точка Мдвижется по отношению к системе отсчетаOxyz (рис. 2). Положение точкиМможет быть задано ее радиусом-вектором
![]() ,
проведенным из любой точкиОтела
отсчета в движущуюся точкуМ. При
движении точкиМэтот вектор
изменяется по модулю и направлению,
являясь, векторной функцией времени
,
проведенным из любой точкиОтела
отсчета в движущуюся точкуМ. При
движении точкиМэтот вектор
изменяется по модулю и направлению,
являясь, векторной функцией времени![]() .
.
Закон движения точки в векторной форме:
![]() .
.
Годограф
радиус–вектора– это геометрическое
место последовательных положений конца
радиус–вектора![]() ,
представляет собой траекторию точки
(рис. 2).
,
представляет собой траекторию точки
(рис. 2).
|
|
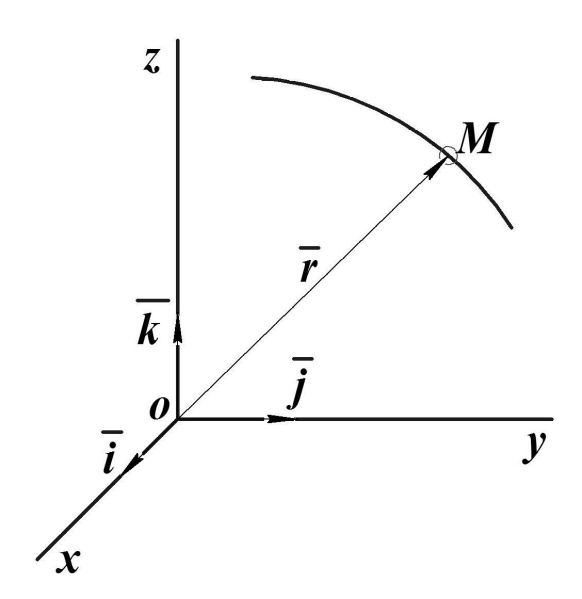
Рис. 2. Векторный способ задания движения точки
Векторный способ задания движения удобен для установления общих кинематических зависимостей, т.к. позволяет описать движение одним векторным уравнением.
Вектор скорости точки. Определение скорости точки при векторном способе задания движения
Пусть
точка в момент времени t,
находится в положении M,
определяемом радиусом-вектором ![]() ,
а в момент времени t1,
находится в положении M1,
определяемом радиусом-вектором
,
а в момент времени t1,
находится в положении M1,
определяемом радиусом-вектором ![]() (рис. 3).
(рис. 3).
|
|
|
Рис. 3. Определение скорости точки при векторном способе задания движения |

Значит,
за время
![]() перемещение точки определяется вектором
перемещение точки определяется вектором![]() ,
называемымвектором
перемещения.
Этот вектор направлен по хорде.
,
называемымвектором
перемещения.
Этот вектор направлен по хорде.
Из
ΔОММ1
следует, что
![]() или
или![]() .
Приращение вектора-функции
.
Приращение вектора-функции![]() равно:
равно:
![]() .
.
Отношение вектора перемещения к соответствующему промежутку времени дает векторную величину, называемую средней по модулю и направлению скоростью точки за промежуток времени .
![]() .
.
Направлен он так же, как и вектор перемещения.
Уменьшая промежуток времени, мы точнее определяем среднюю скорость точки за соответствующий промежуток времени.
Для того, чтобы получить характеристику скорости, независящую от выбора промежутка времени, вводится понятие скорости точки в данный момент времени (или мгновенной скорости):
![]()
![]() -
вектор скорости точки в данный момент
времени равен производной от радиуса-вектора
по времени.
-
вектор скорости точки в данный момент
времени равен производной от радиуса-вектора
по времени.
Вектор ускорения точки. Определение ускорения точки при векторном способе задания движения
Пусть
в момент времени t
точка находится в положении M
и имеет скорость ![]() ,
а в момент времени t1
– положение
M1
и скорость
,
а в момент времени t1
– положение
M1
и скорость ![]() (рис. 4).
(рис. 4).
|
|
|
Рис. 4. Определение ускорения точки |

Следовательно,
за промежуток времени ![]() ,
скорость точки получает приращение
,
скорость точки получает приращение
![]() .
.
Вектор
среднего
ускорения
точки за промежуток времени ![]() равен отношению вектора приращения
скорости к соответствующему промежутку
времени:
равен отношению вектора приращения
скорости к соответствующему промежутку
времени:
![]() .
.
Направлен
этот вектор так же, как и вектор приращения
скорости ![]() (в сторону вогнутости траектории).
(в сторону вогнутости траектории).
Вектор ускорения точки в данный момент времени равен первой производной от вектора скорости или второй производной от радиуса-вектора по времени.
![]() ,
,
![]() .
.
Расположение вектора ускорения точки по отношению к траектории:
если траектория прямая линия – вектор ускорения направлен вдоль траектории;
если траектория плоская кривая – вектор ускорения расположен в плоскости кривой и направлен в сторону вогнутости траектории;
если траектория точки пространственная кривая, то вектор ускорения лежит в соприкасающейся плоскости и направлен в сторону вогнутости траектории (см. п. 1.2.3).