

3.6. Пример выполнения расчетно-графической работы по теме «Плоскопараллельное движение твердого тела»
У
Рис.
46. Исходная схема
Исходные данные: α = 60°, β = 150°, γ = 90°, φ = 30°, θ = 30°,
AD = DB, l1 = 0,4 м, l2 = 1,2 м, l3 = 1,4 м, ω1 = 2 с-1,
ε1 = 7 с-2 (направления ω1 и ε1 – против хода часовой стрелки).
Найти: vB, vE , ω2, аВ, ε3.
Решение:
1. Строим положение механизма в соответствии с заданными углами (рис.47; на этом рисунке изображаем все векторы скоростей).
2.
Определяем vB.
Точка В
принадлежит стержню АВ.
Чтобы найти vB,
надо знать скорость какой-нибудь другой
точки этого стержня и направление
![]() .
По данным задачи, учитывая направление
ω1,
можем определить
.
По данным задачи, учитывая направление
ω1,
можем определить
![]() численно:
численно:
![]() м/с;
м/с;
![]() .
.
Направление
![]() найдем, учитывая, что точкаВ
принадлежит одновременно ползуну,
движущемуся вдоль его направляющих
поступательно. Теперь, зная
найдем, учитывая, что точкаВ
принадлежит одновременно ползуну,
движущемуся вдоль его направляющих
поступательно. Теперь, зная
![]() и направление
и направление![]() ,
воспользуемся теоремой о проекциях
скоростей двух точек тела (стержняАВ)
на прямую, соединяющую эти точки (прямая
АВ).
Сначала по этой теореме устанавливаем,
в какую сторону направлен вектор
,
воспользуемся теоремой о проекциях
скоростей двух точек тела (стержняАВ)
на прямую, соединяющую эти точки (прямая
АВ).
Сначала по этой теореме устанавливаем,
в какую сторону направлен вектор
![]() (проекции скоростей должны иметь
одинаковые знаки). Затем, вычисляя эти
проекции, находим
(проекции скоростей должны иметь
одинаковые знаки). Затем, вычисляя эти
проекции, находим
![]() и
и
![]() м/с.
м/с.

Рис. 47. Схема к определению скоростей точек плоской фигуры
3.
Найдем
![]() .
ТочкаЕ
принадлежит стержню DE.
Следовательно, по аналогии с предыдущим,
чтобы определить
.
ТочкаЕ
принадлежит стержню DE.
Следовательно, по аналогии с предыдущим,
чтобы определить
![]() ,
надо сначала найти скорость точкиD,
принадлежащей одновременно стержню
АВ.
Для этого, зная
,
надо сначала найти скорость точкиD,
принадлежащей одновременно стержню
АВ.
Для этого, зная
![]() и
и![]() ,
строим мгновенный центр скоростей (МЦС)
стержняАВ;
это точка С3,
лежащая на пересечении перпендикуляров
к
,
строим мгновенный центр скоростей (МЦС)
стержняАВ;
это точка С3,
лежащая на пересечении перпендикуляров
к
![]() и
и![]() ,
восставленных из точекА
и В
(к
,
восставленных из точекА
и В
(к
![]() перпендикулярен стержень1).
По направлению вектора
перпендикулярен стержень1).
По направлению вектора
![]() определяем направление поворота стержняАВ
вокруг МЦС С3.
Вектор
определяем направление поворота стержняАВ
вокруг МЦС С3.
Вектор
![]() перпендикулярен отрезкуС3D,
соединяющему точки D
и С3,
и направлен в сторону поворота. Величину
перпендикулярен отрезкуС3D,
соединяющему точки D
и С3,
и направлен в сторону поворота. Величину
![]() найдем из пропорции:
найдем из пропорции:
![]()
Чтобы вычислить С3D и С3В, заметим, что ΔАС3B – прямоугольный, так как острые углы в нем равны 30° и 60°, и что С3В = AB·sin30° = 0,5·АВ = =BD. Тогда ΔBС3D является равносторонним и С3В = С3D. В результате:
![]() м/с;
м/с;
![]() .
.
Так
как точка Е
принадлежит одновременно стержню О2Е,
вращающемуся вокруг О2,
то
![]() .
Тогда, восстанавливая из точекЕ
и D
перпендикуляры к скоростям
.
Тогда, восстанавливая из точекЕ
и D
перпендикуляры к скоростям
![]() и
и![]() ,
построим МЦСС2
стержня DE.
По направлению вектора
,
построим МЦСС2
стержня DE.
По направлению вектора
![]() определяем направление поворота стержняDE
вокруг центра С2.
Вектор
определяем направление поворота стержняDE
вокруг центра С2.
Вектор
![]() направлен в сторону поворота этого
стержня. Из рис. 47 видно, что
направлен в сторону поворота этого
стержня. Из рис. 47 видно, что![]() ,
откудаС2Е
= C2D.
Составив теперь пропорцию, найдем, что
,
откудаС2Е
= C2D.
Составив теперь пропорцию, найдем, что
![]() ,
,
![]() м/с.
м/с.
4.
Вычислим ω2.
Так как МЦС стержня 2
известен (точка С2)
и
![]() = 0,69 м, то
= 0,69 м, то
![]() c-1.
c-1.
5.
Определяем
![]() (рис. 48, на котором изображаем все векторы
ускорений). ТочкаВ
принадлежит стержню АВ.
Чтобы найти
(рис. 48, на котором изображаем все векторы
ускорений). ТочкаВ
принадлежит стержню АВ.
Чтобы найти
![]() ,
надо знать ускорение какой-нибудь другой
точки стержняАВ
и траекторию точки В.
По данным задачи можем определить
,
надо знать ускорение какой-нибудь другой
точки стержняАВ
и траекторию точки В.
По данным задачи можем определить
![]() ,
где численно
,
где численно
![]() м/с2
м/с2
![]() м/с2
м/с2
Вектор
![]() направлен вдольAO1,
а
направлен вдольAO1,
а
![]() – перпендикулярноАО1;
изображаем эти векторы на чертеже (см.
рис. 48). Так как точка В
одновременно принадлежит ползуну, то
вектор
– перпендикулярноАО1;
изображаем эти векторы на чертеже (см.
рис. 48). Так как точка В
одновременно принадлежит ползуну, то
вектор
![]() параллелен направляющим ползуна.
Изображаем вектор
параллелен направляющим ползуна.
Изображаем вектор![]() на чертеже, полагая, что он направлен в
ту же сторону, что и
на чертеже, полагая, что он направлен в
ту же сторону, что и![]() .
.
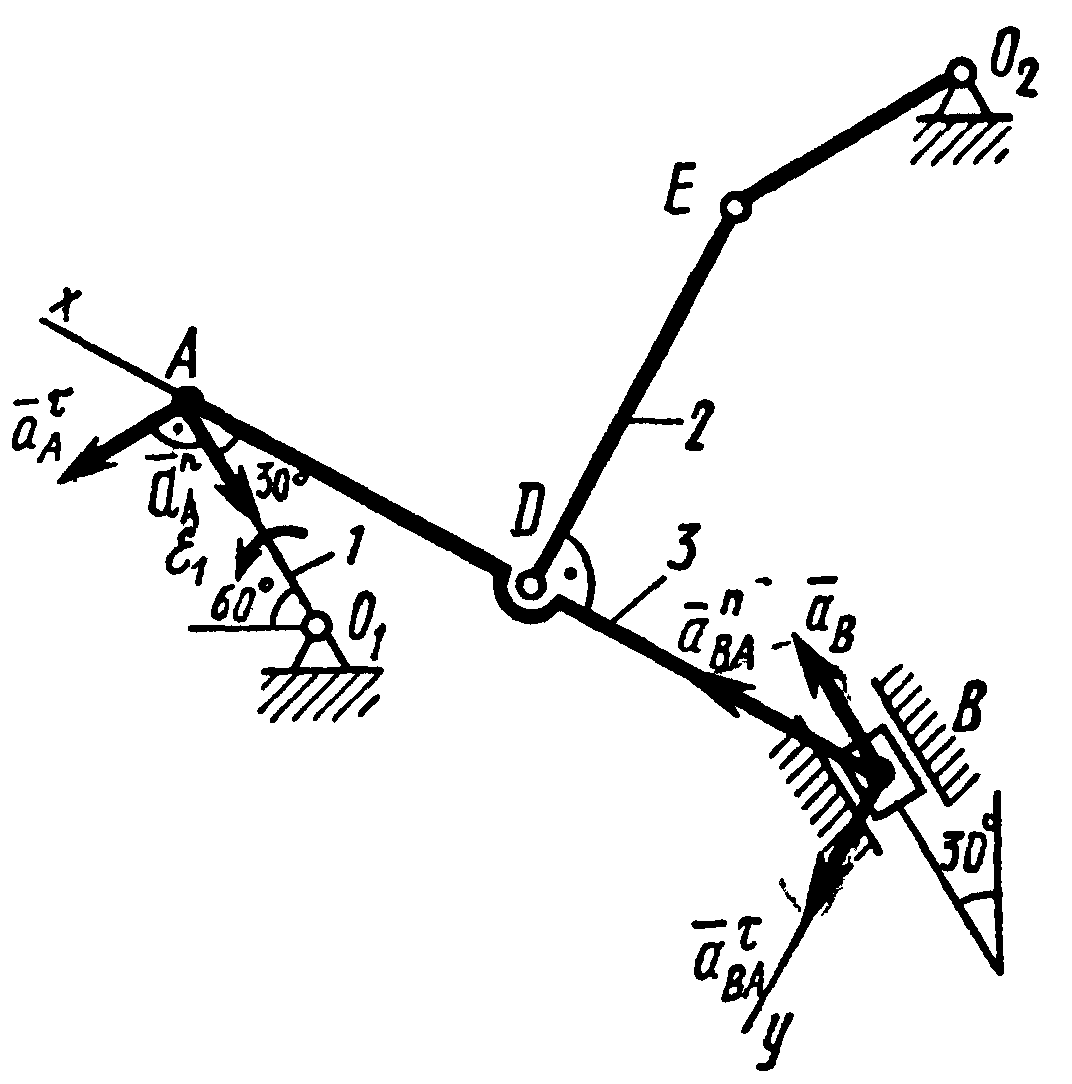
Рис. 48. Схема к определению ускорений точек плоской фигуры
Для
определения
![]() воспользуемся векторным равенством:
воспользуемся векторным равенством:
![]() .
.
Изображаем
на чертеже векторы ![]() (вдоль ВА
от В
к А)
и
(вдоль ВА
от В
к А)
и ![]() (в любую сторону
перпендикулярно ВА);
численно
(в любую сторону
перпендикулярно ВА);
численно ![]() .
Найдя ω3
с помощью построенного МЦС С3
стержня 3,
получим:
.
Найдя ω3
с помощью построенного МЦС С3
стержня 3,
получим:
![]() c-1
и
c-1
и ![]() м/с2.
м/с2.
Таким
образом, из величин, входящих в векторное
равенство, выражающее
![]() ,
неизвестны только числовые значения
,
неизвестны только числовые значения![]() и
и![]() ;
их можно найти, спроецировав обе части
данного равенства на какие-нибудь две
оси.
;
их можно найти, спроецировав обе части
данного равенства на какие-нибудь две
оси.
Чтобы
определить
![]() ,
спроецируем обе части векторного
равенства на направлениеВА
(ось х),
перпендикулярное неизвестному вектору
,
спроецируем обе части векторного
равенства на направлениеВА
(ось х),
перпендикулярное неизвестному вектору
![]() .
Тогда получим:
.
Тогда получим:
![]() .
.
Подставив в полученное равенство числовые значения всех величин, найдем, что
![]() м/с2.
м/с2.
Так
как получилось
![]() > 0, то, следовательно, вектор
> 0, то, следовательно, вектор![]() направлен как показано на рис. 48.
направлен как показано на рис. 48.
6.
Определяем ε3.
Чтобы найти ε3,
сначала определим
![]() .
Для этого обе части векторного равенства,
выражающего
.
Для этого обе части векторного равенства,
выражающего![]() ,
спроецируем на направление, перпендикулярноеАВ
(ось у).
Тогда получим:
,
спроецируем на направление, перпендикулярноеАВ
(ось у).
Тогда получим:
![]()
Подставив
в полученное равенство известные
числовые значения, найдем, что
![]() =
-3,58 м/с2.
Знак указывает, что направление
=
-3,58 м/с2.
Знак указывает, что направление
![]() противоположно показанному на рис. 48.
противоположно показанному на рис. 48.
Теперь
из равенства
![]() получим
получим
![]() с-2.
с-2.
Ответ:
vB
= 0,46 м/с; vE
= 0,46 м/с; ω2
= 0,67 с-1;
![]() = 0,72 м/с2;
= 0,72 м/с2;
![]() =2,56с-2.
=2,56с-2.