

4.2. Кинематические уравнения Эйлера
Для
определения вектора ![]() найдем его проекции на подвижные оси
Охуz
(рис. 54).
Этот вектор можно представить в виде:
найдем его проекции на подвижные оси
Охуz
(рис. 54).
Этот вектор можно представить в виде:
![]() ,
,
где численно
![]() ,
,
![]() ,
,
![]() .
.
Проецируя обе части векторного равенства на оси х, у, z, получим:
![]() ,
,
![]() ,
,![]() .
.
Проекции
векторов ![]() и
и
![]() находим
сразу (согласно численным значениям
слагаемых векторов и рис. 54):
находим
сразу (согласно численным значениям
слагаемых векторов и рис. 54):
![]() ,
,
![]() ,
,![]() ,
,![]() ,
,![]() .
.
Для
определения проекций вектора
![]() ,
проведем через оси Оz1
и
Оz
плоскость, которая пересечется с
плоскостью Оху
вдоль
линии ОL.
Так
как линяя ОК
перпендикулярна плоскости zОz1,
то
она перпендикулярна и линии OL
(
,
проведем через оси Оz1
и
Оz
плоскость, которая пересечется с
плоскостью Оху
вдоль
линии ОL.
Так
как линяя ОК
перпендикулярна плоскости zОz1,
то
она перпендикулярна и линии OL
(![]() ,
a
,
a
![]() ).
Тогда,
проецируя вектор
).
Тогда,
проецируя вектор ![]() на линию OL,
а
эту проекцию в свою очередь на оси Ох
и Оу,
получим:
на линию OL,
а
эту проекцию в свою очередь на оси Ох
и Оу,
получим:
![]() ,
,
![]() ,
,![]() .
.
Определив проекции всех слагаемых мгновенной угловой скорости тела на подвижные оси Оxyz, получим окончательно:
 –кинематические
уравнения Эйлера.
–кинематические
уравнения Эйлера.
|
|
|
Рис. 54.
Проекции вектора
|

Аналогично
можно найти проекции вектора ![]() на неподвижные оси Оx1y1z1.
Соответствующие
формулы имеют вид:
на неподвижные оси Оx1y1z1.
Соответствующие
формулы имеют вид:

Используя
эти равенства, можно определить
проекции на неподвижные оси Оx1y1z1
вектора
![]() .
Так как
.
Так как
![]() ,
то
,
то
![]() ,
,
![]() ,
,![]()
Эти
проекции и определяют вектор ![]() .
Таким образом, зная уравнения движения
твердого тела вокруг неподвижной точки,
можно по полученным формулам найти
.
Таким образом, зная уравнения движения
твердого тела вокруг неподвижной точки,
можно по полученным формулам найти ![]() и
и ![]() .
.
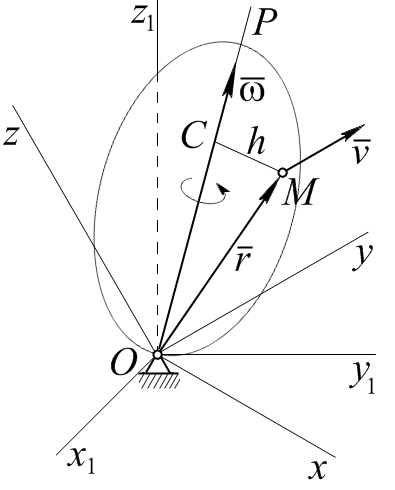
4.3. Скорости и ускорения точек тела
Так
как тело, движущееся вокруг неподвижной
точки, имеет в каждый момент времени
мгновенную ось вращения ОР,
вокруг которой происходит элементарный
поворот с угловой скоростью
![]() (рис. 55), то вектор скорости какой-нибудь
точкиМ тела
будет определяться в этот момент
равенством
(рис. 55), то вектор скорости какой-нибудь
точкиМ тела
будет определяться в этот момент
равенством
![]() ,
где
,
где
![]() – радиус-вектор, проведенный в точкуМ
из неподвижной
точки О.
Вектор
– радиус-вектор, проведенный в точкуМ
из неподвижной
точки О.
Вектор
![]() направлен
перпендикулярно
плоскости МОР,
проходящей
через точку М
и ось ОР,
в сторону
поворота тела.
направлен
перпендикулярно
плоскости МОР,
проходящей
через точку М
и ось ОР,
в сторону
поворота тела.
Численно
![]() ,
где h
= МС
– расстояние точки М
до мгновенной оси.
,
где h
= МС
– расстояние точки М
до мгновенной оси.
Геометрически
скорость любой точки М
тела в данный
момент времени можно найти, зная в этот
момент скорость ![]() какой-нибудь
точки А тела
и направление скорости
какой-нибудь
точки А тела
и направление скорости ![]() другой
точки В
этого тела.
Пусть
другой
точки В
этого тела.
Пусть ![]() и направление
и направление ![]() известны. Проведем тогда через точку А
плоскость 1,
перпендикулярную вектору
известны. Проведем тогда через точку А
плоскость 1,
перпендикулярную вектору
![]() (рис. 56). Как было показано ранее (см.
рис. 55), мгновенная осьОР
должна лежать
в этой плоскости.
(рис. 56). Как было показано ранее (см.
рис. 55), мгновенная осьОР
должна лежать
в этой плоскости.
|
|
|
Рис. 55. Вектор скорости точки исследуемого тела |
|
hM |
|
Рис. 56. Распределение линейных скоростей точек исследуемого тела |

Но
одновременно ось ОР
должна лежать
и в плоскости 2,
проведенной
через точку В
перпендикулярно
вектору ![]() .
Следовательно, прямая, по которой
пересекутся эти плоскости, и будет
мгновенной осью вращения ОР.
Теперь,
определив расстояние h
от
точки А
до оси ОР,
найдем угловую скорость ω тела в данный
момент времени:
.
Следовательно, прямая, по которой
пересекутся эти плоскости, и будет
мгновенной осью вращения ОР.
Теперь,
определив расстояние h
от
точки А
до оси ОР,
найдем угловую скорость ω тела в данный
момент времени:
![]() .
После этого значение скорости
.
После этого значение скорости![]() любой точки М
тела находится по формуле
любой точки М
тела находится по формуле
![]() ,
а вектор
,
а вектор![]() будет
направлен перпендикулярно плоскости
ОМР
(hM
– расстояние от точки М
до оси ОР).
будет
направлен перпендикулярно плоскости
ОМР
(hM
– расстояние от точки М
до оси ОР).
В частном случае, когда известно, что скорость какой-то точки тела равна в данный момент времени нулю, прямая, проходящая через эту точку и неподвижную точку О тела, будет мгновенной осью вращения и расчет существенно упростится.
Аналитически
скорость ![]() определяют по ее проекциям на какие-нибудь
координатные оси. Найдем проекции
вектора
определяют по ее проекциям на какие-нибудь
координатные оси. Найдем проекции
вектора ![]() на оси
Охуz, жестко
связанные с телом и движущиеся с ним
(см. рис. 55); эти оси имеют то преимущество,
что в них координаты х,
у, z
точки М
будут
величинами постоянными. Так rx
= x, ry =
y, rz
= z,
то по
известной формуле векторной алгебры
на оси
Охуz, жестко
связанные с телом и движущиеся с ним
(см. рис. 55); эти оси имеют то преимущество,
что в них координаты х,
у, z
точки М
будут
величинами постоянными. Так rx
= x, ry =
y, rz
= z,
то по
известной формуле векторной алгебры

![]()
![]()
Отсюда,
разлагая определитель по элементам
первой строки, учитывая, что
![]() и что,
следовательно, коэффициенты при
и что,
следовательно, коэффициенты при
![]() ,
,![]() ,
,![]() в этом разложения должны равняться
в этом разложения должны равняться![]() ,
,![]() ,
,![]() соответственно, получим:
соответственно, получим:

Эти
формулы, также как и определяющие
проекции вектора ![]() на подвижные оси Oxyz,
называют формулами
Эйлера. Каждую
из них можно
тоже получить из предыдущей формулы с
помощью круговой перестановки букв x,
y,
z.
на подвижные оси Oxyz,
называют формулами
Эйлера. Каждую
из них можно
тоже получить из предыдущей формулы с
помощью круговой перестановки букв x,
y,
z.
В
частном случае эти формулы справедливы
и при вращении тела вокруг неподвижной
оси z.
Так как при этом ![]() и
и ![]() ,
то для такого случая
,
то для такого случая
![]() ,
,
![]() ,
,![]() .
.
Определим
теперь ускорение точки М.
Из равенства
![]() ,
дифференцируя его по времени, найдем
,
дифференцируя его по времени, найдем
![]()
Так
как ![]() ,
а
,
а ![]() ,
то окончательно
,
то окончательно
![]() .
.
У
Рис. 57.
Определение векторов ускорений точек
тела
![]() называют ещевращательным,
а ускорение
называют ещевращательным,
а ускорение
![]() –осестремительным
ускорением точки М.
Вектор
–осестремительным
ускорением точки М.
Вектор ![]() направлен перпендикулярно
плоскости, проходящей через точку М
и вектор
направлен перпендикулярно
плоскости, проходящей через точку М
и вектор ![]() (рис. 57), а по модулю
(рис. 57), а по модулю
![]() ,
гдеh1
– расстояние от точки
М до вектора
,
гдеh1
– расстояние от точки
М до вектора
![]() .
Вектор же
.
Вектор же ![]() ,
перпендикулярный одновременно
,
перпендикулярный одновременно ![]() и
и ![]() ,
будет направлен вдоль МС
(рис. 57), причем по модулю
,
будет направлен вдоль МС
(рис. 57), причем по модулю
![]() ,
так как
,
так как![]() .
.
Заметим,
что в отличие от результатов, полученных
ранее, здесь
![]() не будет вообще вектором касательного
ускорения точкиМ
(по касательной
направлен вектор
не будет вообще вектором касательного
ускорения точкиМ
(по касательной
направлен вектор ![]() ,
а направление вектора
,
а направление вектора ![]() будет вообще другим); следовательно, и
вектор
будет вообще другим); следовательно, и
вектор ![]() не будет вектором
нормального ускорения точки М.
не будет вектором
нормального ускорения точки М.