

Учебное пособие ТеорМех
.pdfкоторых объекты, на которые воздействуют силы, будут находиться в равновесии.
Во втором разделе, называемом кинематикой, будет рассматри- ваться левая часть вышеуказанного соотношения, то есть будут ис- следоваться так называемые кинематические характеристики движе- ния такие, как траектория, скорость, ускорение объектов без учета факторов, вызывающих это движение.
Третий, более сложный, раздел посвящен установлению связей между силовыми воздействиями на объекты и кинематическими ха- рактеристиками их движения. Этот раздел называется динамикой.
Изложение теоретического материала часто будет иллюстриро- ваться примерами как классического, так и прикладного характера. Эти примеры, как надеются авторы, помогут читателю при выполне- нии лабораторных и расчетно-графических заданий по курсу теорети- ческой механики, а также затронут некоторые часто встречающиеся в исследовательской деятельности вопросы, связанные с задачами ме- ханического движения.
Авторы
11

РАЗДЕЛ ПЕРВЫЙ
СТАТИКА ТВЕРДОГО ТЕЛА
ГЛАВА I. ОСНОВНЫЕ ПОНЯТИЯ И ИСХОДНЫЕ ПОЛОЖЕНИЯ СТАТИКИ
§ 1. Основные понятия и исходные положения статики
Как уже было сказано ранее, большинство формализованных на- ук в основе своей опирается на ряд недоказуемых фактов, называе- мых аксиомами. Формулировкам и анализу этих аксиом и будет по- священ этот подраздел.
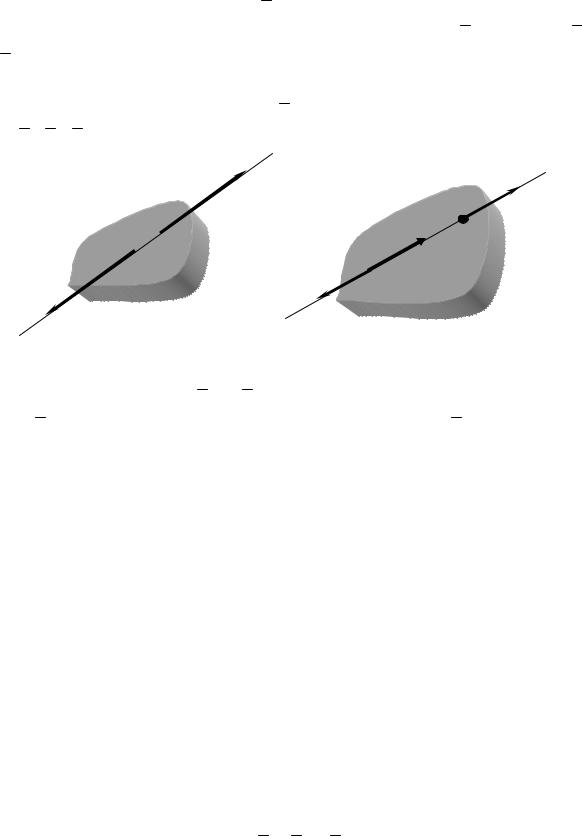
Прежде всего, необходимо дать определение ряду понятий, с ко- торыми нам придется встречаться как в этом, так и в следующих раз- делах курса. Первым таким понятием является сила. Как известно чи- тателю из курса физики, сила - это векторная величина, а вектор клас- сически характеризуется величиной, направлением и точкой прило- жения. Ниже будет показано, что для силы это несколько не так. При- ведем простой пример. Представьте себе, что мы пытаемся переме- щать некоторое тело с помощью невесомой нити (рис.1.1).
В
А
Рис. 1.1
Если сначала мы тянем нить в направлении стрелки, приклады- вая силу в точке А, а затем такую же по величине и направлению си- лу в точке В, то характер воздействия на тело не изменится, хотя точ- ки приложения у силы были разные.
Как видно из этого примера, одним из факторов, характеризую- щих силу, является не точка ее приложения, а прямая, вдоль которой она действует – линия действия силы.
Кроме того, в дальнейшем будут использоваться следующие по- нятия:
Системой сил называется совокупность нескольких сил.
12
Свободным называется тело, которому можно из данного поло- жения сообщить некоторое перемещение в любом направлении.
Эквивалентными называются системы сил, которые могут за- менять друг друга так, что при этом не меняется состояние покоя или движения, в котором находится тело.
Уравновешенной называется система сил, под действием кото- рой тело находится в равновесии.
Равнодействующей данной системы сил называется сила, если она существует, эквивалентная данной системе сил.
Сила, вектор которой противоположен вектору равнодействую-
щей, называется уравновешивающей силой.
Сила, приложенная в одной точке тела, называется сосредото-
ченной.
Силы, действующие на все точки данного объема или некоторой части поверхности тела, называются распределенными.
Геометрическая сумма всех сил системы называется главным вектором этой системы.
Силы, действующие на данное тело (или систему тел), можно разделить на внутренние и внешние.
Внешними называются силы, которыми действуют на это тело (или систему тел) другие тела.
Внутренними называются силы, с которыми действуют друг на друга части одного тела (или тела одной системы).
§ 2. Аксиомы статики
При дальнейшем изложении материала нам понадобится понятие равновесия различных объектов. Будем говорить, что тело находится в равновесии, если оно находится в состоянии покоя, равномерного прямолинейного движения или равномерного вращения.
Условие равновесия двух сил, приложенных к твердому телу, ус- танавливается следующей аксиомой.
Аксиома 1. Две силы, приложенные к твердому телу, урав-
новешиваются тогда и только тогда, когда они равны по величине, противоположны по направлению и имеют общую линию дей-
ствия (рис.1.2).
Вполне очевидно, что присоединение или отбрасывание сил, вза- имно уравновешивающихся, не нарушает равновесия твердого тела, хотя, конечно, существенно изменяет картину распределения внут- ренних сил в теле. Этот факт позволяет установить очень важное со- отношение сил, которое можно сформулировать следующим образом.
13
Равновесие твердого тела не нарушается от перенесения точки приложения силы вдоль ее линии действия. Действительно, пусть на тело действует некоторая сила F (рис.1.3), приложенная в точке А. Добавим в точке В, лежащей на линии действия силы F, две силы F1
и F2 , как это показано на рисунке.
На основании аксиомы 1 эти две силы взаимно уравновешивают- ся, в связи с чем действие силы F эквивалентно действию системы сил F, F1 , F2 .
F1 |
F |
|
|
|
А |
|
F1 |
F2 

 В
В
F2
Рис. 1.2 |
Рис. 1.3 |
Опять же согласно аксиоме 1 мы можем отбросить взаимно урав- новешивающиеся силы F и F2 . Таким образом, действие исходной силы F оказывается эквивалентным действию силы F1 . Эти рассуж- дения доказывают очень важное положение о том, что результат
действия силы на твердое тело не изменяется от перенесения точки приложения силы вдоль ее линии действия.
Последнее утверждение дает теперь возможность дать определе- ние силы как вектору, характеризующемуся величиной, направлением и линией действия.
Перейдем к вопросу о сложении сил. Как известно из курса мате- матики и физики, два непараллельных вектора можно складывать по правилу параллелограмма. Этот факт находит свое отражение в сле- дующей аксиоме.
Аксиома 2. Равнодействующая двух непараллельных сил, приложенных в одной точке, изображается диагональю параллелограмма, построенного на этих силах (рис.1.4).
Понятно, что если силы непараллельные и приложены в раз- личных точках, то, согласно сказанному выше их можно перенести в одну точку. Аналитически сумма двух сил записывается обычным об- разом:
F1 + F2 = R .
14
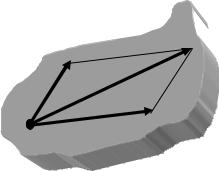
Ясно также, что если мы имеем несколько непараллельных сил с общей точкой приложения, то, складывая их поочередно, также мож- но прийти к одной равнодействующей силе.



 R
R 


 F1
F1 

 F2
F2




 A
A
Рис. 1.4
Следующие рассуждения вызваны необходимостью естественно- го рассмотрения случая нетвердых тел, для которых также важны ис- следования их равновесия. В технике очень часто встречаются объек- ты, состоящие из нескольких твердых тел, каким-либо образом со- единенных между собой. Эти объекты образуют некоторую конст- рукцию, исследование силовых воздействий на которую представляет определенный практический интерес. При рассмотрении равновесия нетвердого тела часто используется следующая аксиома.
Аксиома 3. Равновесие нетвердого тела не нарушается от затвердевания данного тела.
Из этой аксиомы следует, что силы, под действием которых не- которое нетвердое тело находится в равновесии, будут поддерживать в равновесии это же тело, если предположить его затвердевшим. От- метим, однако, что для обеспечения равновесия нетвердого тела силы, к нему приложенные, должны удовлетворять не только условиям рав- новесия твердого тела, но и некоторым добавочным условиям, кото- рые изучаются в одном из наиболее любимых студентами курсе “Со- противление материалов”.
Завершая перечень основных фактов, необходимых для изложе- ния материала данного раздела теоретической механики, мы приве- дем последнюю аксиому, известную широкому кругу читателя как третий закон Ньютона:
Аксиома 4. Всякому действию соответствует равное и противоположно направленное противодействие.
Эта аксиома достаточно понятна, так как она утверждает тот оче- видный факт, что в природе не может быть одностороннего действия силы. Отметим, однако, что это утверждение не вполне тривиально, если речь идет о силах инерции, о которых мы будем говорить в раз- деле “Динамика”.
15

§ 3. Связи. Реакции связей
Если перемещению какого-либо тела, например, стержня в ка- ком-нибудь из направлений препятствуют другие тела, например, опоры, то такое тело называется несвободным.
Тела, препятствующие перемещению, называются связями, на- ложенными на то тело, перемещению которого они препятствуют. Вид связи зависит от конструкции или вида опор.
Тело, стремясь под действием приложенных сил осуществить пе- ремещение, которому препятствует связь, действует на тело силой, называемой давлением на связь. Тогда, по аксиоме 4, связь действует на тело равной по модулю, но противоположно направленной силой. Сила, с которой связь действует на тело, называется реакцией (проти- водействием) связи. Очевидно, реакция связи возникает лишь по- стольку, поскольку на тело действуют силы, стремящиеся изменить характер движения тела или его статического равновесия.
Силы, действующие на тело, делят на реакции связей и силы, не являющиеся реакциями, которые называют активными или заданны- ми.
Если связь препятствует движению тела в одном направлении (односторонняя связь), то реакция направлена в сторону, противопо- ложную той, куда связь не дает перемещаться телу. Если же связь препятствует перемещению тела по нескольким направлениям (мно- госторонняя связь), то направление реакции такой связи определяется в зависимости от остальных сил, действующих на тело.
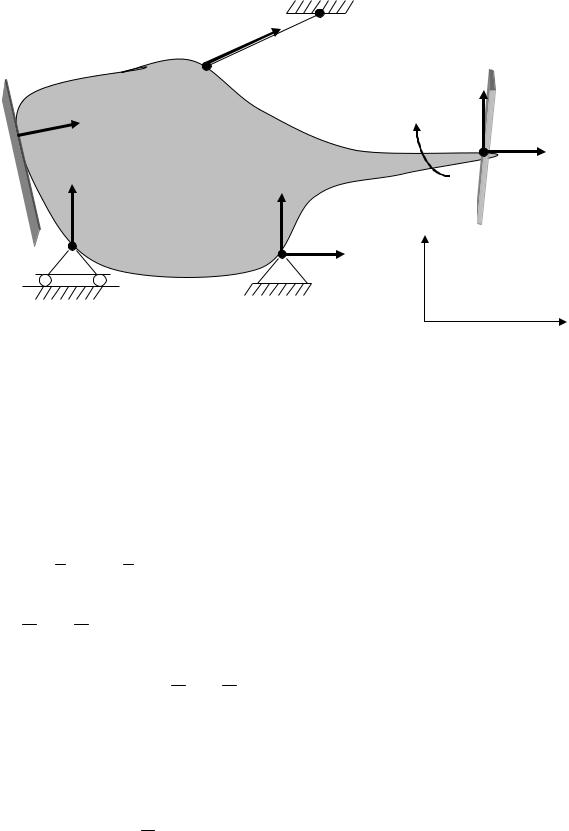
При изучении равновесия тела оно обычно изолируется от внеш- них тел, действие которых заменяется силами реакций связей. На рис.1.5 изображены наиболее часто встречаемые реакции связей, ко- торые будут использоваться в приводимых далее примерах. Простей- шая из них представляется в виде силы реакции нити, троса, стержня, прикрепленных к телу в точке А. Эта реакция, которую мы обозначим через T , направлена вдоль нити, троса или стержня и приложена в точке A.
В точке В тело облокачивается без трения на плоскость. В этом случае действие этой плоскости на тело представляется в виде реак- ции N , направленной перпендикулярно плоскости.
В точке С тело закреплено шарниром, который может переме- щаться вдоль некоторой плоскости (подвижный шарнир). В этом слу- чае его реакция представляется в виде силы RC , направленной пер- пендикулярно плоскости перемещения шарнира.
16
|
A |
|
T |
|
В |
N |
|
|
YE |
|
|
ME |
||
|
|
|
|
XE |
|
RC |
YD |
|
E |
|
|
|
||
|
|
|
|
|
|
C |
D |
XD |
Y |
|
|
|
|
X
Рис. 1.5
В случае неподвижного шарнира (точка D на рис.1.5) дело обсто- ит несколько сложнее. Эта сложность заключается в том, что направ- ление реакции неподвижного шарнира зависит от силовых воздейст- вий, приложенных к телу, поэтому при представлении этой реакции на чертеже пришлось бы использовать две неизвестные: величину ре- акции и ее направление, характеризуемое каким-либо углом. Более удобно, однако, представлять эту реакции с помощью двух состав- ляющих: R1D и R2D . Если же эти составляющие направлены вдоль соответствующих осей координат X и Y, то их удобно обозначать си- лами XD и YD , как это и сделано на рис.1.5.
В случае жесткой заделки (точка E на рис.1.5), кроме составляю- щих силовых реакций XE и YE необходимо добавить еще и реактив- ный момент ME , который препятствует повороту тела вокруг точки Е.
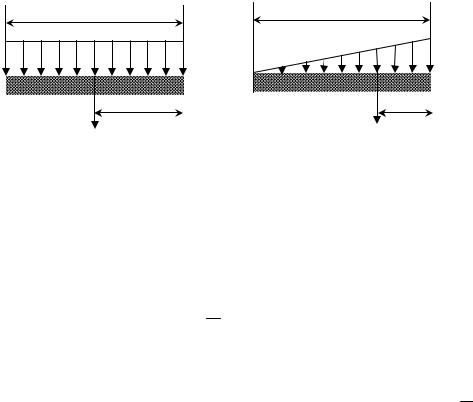
Силы, равномерно распределенные вдоль отрезка прямой
(рис.1.6 а). Для такой системы сил интенсивность q имеет постоянное значение. При статических расчетах эту систему сил можно заменить равнодействующей Q . По модулю, Q=aq . Приложена сила в середине отрезка АВ.
17
а |
a |
С
|
|
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
|
|
|
|
|
В |
|
|
a/3 |
|
|
А |
a/2 |
А |
||||||
|
|
Q |
|
|
|
Q |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
||||
|
|
а) |
|
|
|
б) |
||
Рис. 1.6
Силы, распределенные вдоль отрезка прямой по линейному закону (рис.1.6б). Примером такой нагрузки могут служить силы давления воды на плотину, имеющие наибольшее значение у дна и падающие до нуля у поверхности воды. Для этих сил интенсивность q является величиной переменной, растущей от нуля до максимального значения qmax. Равнодействующая Q таких сил определяется анало- гично равнодействующей сил тяжести, действующих на однородную треугольную пластину. Так как вес однородной пластины пропорцио-
нален ее площади, то, по модулю, Q= 12 aqmax . Приложена сила Q на расстоянии а/3 от стороны ВС треугольника ABC.
Вопросы для самопроверки
1.Сформулируйте основные понятия статики.
2.В чем заключаются аксиомы статики свободного абсолютно твердого тела?
3.Что дает аксиома о переносе силы по линии действия?
4.Какие типы связей вы знаете?
5.В чем сущность третьего закона Ньютона ?
6.Как определить равнодействующие
распределенных нагрузок ?
7. Чем характеризуется вектор силы ?
18
ГЛАВА II. СИСТЕМА СХОДЯЩИХСЯ СИЛ
§ 1. Приведение к простейшей системе
В настоящем подразделе будет рассмотрена наиболее простая для исследования сходящаяся система сил. В ряде практически важных случаев силы, прикладываемые к телу, проходят через одну точку. Если же мы вообще имеем дело с некоторой материальной точкой, то сами силы, приложенные к точке, или линии их действия обязательно проходят через нее.
Дадим следующее определение. Система сил называется схо-
дящейся, если линии действия всех сил, входящих в систему, пересекаются в одной точке.
Как уже было установлено ранее, силу можно перемещать вдоль ее линии действия. Поэтому в настоящей ситуации можно, осущест- вив передвижение всех сил, считать, что все они выходят из одной точки (рис.2.1). Итак, сходящуюся систему сил F1 , F2 , …, Fn можно
представить как набор сил, приложенных в одной точке А. |
|
||||||||||||||
|
|
Складывая силы |
|
|
|
|
|
|
мы |
||||||
|
|
F1 и F2 , |
|||||||||||||
F1 |
F2 |
можем найти их равнодействую- |
|||||||||||||
|
|
щую |
|
12 , складывая затем эту |
рав- |
||||||||||
|
|
R |
|||||||||||||
|
|
нодействующую с силой |
|
|
мы |
||||||||||
|
|
F3 , |
|||||||||||||
А |
F3 |
получим равнодействующую трех |
|||||||||||||
|
|
сил |
|
123 и т.д. Таким образом, в ре- |
|||||||||||
Fn |
|
R |
|||||||||||||
|
зультате мы получим одну равно- |
||||||||||||||
|
|
||||||||||||||
|
|
действующую силу |
|
, которая яв- |
|||||||||||
Рис. 2.1 |
|
R |
|||||||||||||
|
|
ляется геометрической (векторной) |
|||||||||||||
суммой всех сил, входящих в рассматриваемую систему:
n |
|
R=åFi . |
(2.1) |
i=1
Графически такую последовательность действий можно изобра- зить с помощью так называемого силового многоугольника, кото- рый более экономично позволяет складывать силы, приложенные в одной точке. Действительно, вместо требующего дополнительных по- строений, сложения двух векторов по правилу параллелограмма (рис.2.2а), проще использовать сложение по правилу треугольника
19

(рис.2.2б). Последнее построение особенно удобно, если приходится складывать несколько сил F1 ,… Fn .
F1 |
F2 |
|
|
||
R |
F1 |
|
|
R |
|
F2 |
|
|
а) |
б) |
|
Рис. 2.2 |
||
|
Легко видеть, что суммирование векторов сил, как это показано на рис.2.3, не требует дополнительных построений. Эта конструкция и называется силовым многоугольником.
На рис.2.3 показано, как можно геометрически сложить n сил F1 , F2 ,…, Fn и получить их равнодействующую R .
F2
F1 |
F3 |
|
|
R |
Fn |
Рис. 2.3 |
|
§ 2. Условие равновесия системы сходящихся сил.
Перейдем теперь к рассмотрению условия равновесия системы сходящейся сил. Очевидно, что для равновесия тела, находящегося под действием изучаемой системы сил, необходимым и достаточным является условие равенства нулю равнодействующей, что, согласно формуле 2.1 можно записать в виде следующего соотношения:
n |
|
åFi =0 |
(2.2) |
i=1
Геометрически это означает тот факт, что начало первой силы совпадает с концом последней, то есть силовой многоугольник является замкнутым. Использование геометрического метода опреде- ления условий равновесия сходящейся системы сил предполагает по- строение замкнутого силового многоугольника с последующим при-
20