

Учебное пособие ТеорМех
.pdf
|
d |
æ |
¶(T - |
П) |
ö |
|
¶(T - П) |
|
|
ç |
÷ |
- |
= 0. |
||||
|
|
ç |
¶qi |
|
÷ |
¶qi |
||
|
dt è |
|
ø |
|
|
|||
|
|
|
& |
|
|
|
|
|
Функция |
|
L=T–П |
|
(11.29) |
||||
|
|
|
|
|||||
называется кинетическим потенциалом, или функцией Лагранжа механической системы. С учетом определения (11.29) уравнения Ла-
гранжа второго рода для консервативной системы принимают особо изящный вид:
d |
æ |
¶L |
ö |
|
¶L |
|
|
|
ç |
÷ |
- |
= 0 , (i=1, 2, …, s). |
(11.30) |
||||
|
|
|
||||||
|
ç |
¶qi |
÷ |
¶qi |
||||
dt è |
ø |
|
|
|
||||
|
|
& |
|
|
|
|
|
|
Сделаем в заключение следующие замечания.
1.Вид и число уравнений Лагранжа второго рода не зависят ни от количества тел (или материальных точек), составляющих сис- тему, ни от характера движения этих тел. Количество уравнений определяется только числом степеней свободы системы.
2.При идеальных связях эти уравнения позволяют заранее ис- ключить из рассмотрения реакции связей.
3.Состояние механической системы, на которую действуют только консервативные силы, определяется заданием лишь одной функции Лагранжа. Зная эту функцию, можно составить диффе- ренциальные уравнения движения системы.
Вопросы для самопроверки
1.Что называется обобщенной силой активных сил, приложенных к системе?
2.Что такое обобщенная сила инерции?
3.Сформулируйте принцип Даламбера в обобщенных силах.
4.Какие связи называются геометрическими?
5.Что называется возможным перемещением несвободной ме- ханической системы?
6.Как взаимосвязаны возможные и действительные перемеще- ния системы?
7.Какие связи называются: а) стационарными; б) идеальными?
8.Сформулируйте принцип возможных перемещений. Запишите его формульное выражение.
9.Какие связи называются голономными? Что называется чис- лом степеней свободы механической системы?
10.Что называется обобщенными координатами системы?
161
11.Сколько степеней свободы имеет управляемое колесо автомобиля?
12.Что называется обобщенной силой?
13.Как определяется размерность обобщенной силы?
14.Запишите систему дифференциальных уравнений Лагранжа второго рода.
15.Зависит ли число уравнений Лагранжа механической системы от количества тел, входящих в состав системы?
162
ГЛАВА XII. ТЕОРИЯ УДАРА
§ 1. Общие положения
Силы, действующие на тела, подразделяют на силы, изменяющие скорости точек в течение некоторого конечного промежутка времени,
— конечные силы (например, сила тяжести) и силы, изменяющие
скорости точек тела в течение весьма малого промежутка времени (порядка десятой и меньше доли секунды), — мгновенные или
ударные силы.
Очень часто ударные силы возникают в сельскохозяйственном производстве при процессе дробления, сепарации и т.д. Подобные си- лы могут вызывать травмирование зерна, поэтому исследование ха-
рактера ударных явлений является достаточно важным элементом при изучении теоретической механики.
Мгновенной, или ударной, называют силу, действующую в течение весьма малого промежутка времени, но достигающую при этом таких больших значений, что ее импульс за это время становится конечной величиной.
Пусть F — ударная сила, τ — время действия этой силы. Как было сказано выше, τ – достаточно малая величина. Тогда импульс
этой силы за промежуток времени τ
τ
S = ò Fdt .
0
По теореме о среднем S = Fср × τ, Fср –среднее значение ударной
силы за время τ.
Здесь S — конечная величина. Это, очевидно, возможно в слу- чае, если величина силы порядка 1/τ,. Импульс S называют ударным.
Явление, при котором возникают мгновенные, или ударные силы,
А |
называют ударом. |
В |
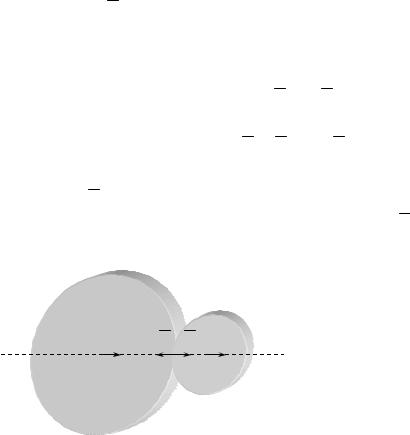
Процесс удара рассмотрим на |
примере соударения двух тел. |
|
v1 F′ F′ v2 |
Пусть между телами А и В про- |
|
изошел удар. Допустим, что со- |
|
прикосновение происходит в од- |
|
ной точке (рис.12.1). Тело А в мо- |
|
мент соприкосновения имеет ско- |
Рис. 12.1 |
рость v1 , а тело В — скорость v2 . |
163

Движение тел предполагаем поступательным и для определенности допустим v1 > v2 . Общую нормаль к поверхности соударяющихся тел
в точке их соприкосновения назовем линией удара.
Удар называют центральным, если центры масс соударяющихся тел лежат на линии удара. Центральный удар называют прямым, ес- ли скорости центров масс соударяющихся тел в начале удара направ- лены по линии удара.
Удар тел А и В для простоты предполагаем прямым центральным ударом. Тела А и В считаем абсолютно гладкими. После момента со- прикосновения оба тела деформируются, при этом скорость тела А уменьшается, а скорость тела В увеличивается. Процесс деформации заканчивается тогда, когда скорости тел делаются равными. Эту часть явления удара назовем фазой деформации; продолжительность этой фазы обозначим τ1.
Ударная сила F на тело А со стороны тела В направлена по ли- нии удара влево. Сила F′ со стороны тела А на тело В направлена по линии удара вправо и F′ = −F .
Ударный импульс силы F за фазу деформации
τ1
S1 = ò Fdt
0
Импульс силы F' за эту же фазу обозначим S′ очевидно, S′ = -S1′.
После деформации тела восстанавливают свою форму целиком или частично, если они в какой-то степени упруги. Эту часть явления удара назовем фазой восстановления. Продолжительность этой фазы обозначим τ2. Фаза восстановления заканчивается, когда тела отделя- ются друг от друга. Импульс силы за фазу восстановления равен
τ2
S2 = ò Fdt
τ1
где τ = τ1 + τ2 — полная продолжительность удара.
Эффект действия ударной силы оценивается по ее импульсу – конечной величине. В отличие от общих теорем динамики, изложен- ных в предыдущих главах, в теоремах, применяемых к удару, будут входить не ударные силы, а ударные импульсы.
Упругость соударяющихся тел при ударе оценивают отношением ударного импульса за фазу восстановления к ударному импульсу за фазу деформации, т. е. отношением S2/S1.
164

Безразмерный коэффициент k называют коэффициентом восста-
новления
k = |
S2 |
. |
(12.1) |
|
|||
|
S |
|
|
1 |
|
|
|
Обычно коэффициент восстановления определяют опытным пу- тем. В зависимости от природы тел он изменяется в пределах
0 ≤ k ≤ 1.
При k = 0 величина S2 = 0, т. е. фаза восстановления отсутствует
— это при ударе абсолютно неупругих тел. Такой удар называют аб-
солютно неупругим.
В случае k = 1 величина S2= S1. В этом случае можно считать, что за фазу восстановления тела полностью восстанавливают свою фор- му. Этот удар называют абсолютно упругим.
При 0 < k < 1 происходит удар тел средней упругости и этот удар называют упругим.
§2. Действие ударной силы на материальную точку
Пусть на материальную точку массой m действует ударная сила F и конечная сила F′. Время действия ударной силы обозначим τ, скорость точки в начале удара v в конце удара u . Тогда по теореме
об изменении количества движения материальной точки
τ |
|
τ |
|
||
mu - mv = ò |
|
|
|
|
(12.2) |
Fdt + ò F′dt . |
|||||
0 |
0 |
|
|
|
|
Первый интеграл есть ударный импульс S и, следовательно, конечная величина. Для второго интеграла (импульса силы) F′ по теореме о среднем
значении
τ
S′ = ò F′dt = Fср′ τ
0
где F′ср — конечная величина, τ — малая величина и поэтому можно при- нять S′ = 0 . Тогда равенство (12.2) примет вид
mu - mv = |
|
, |
(12.3) |
S |
т. е. изменение количества движения материальной точки за время
удара равно ударному импульсу, приложенному к точке
165

Уравнение (12.3)называют основным уравнением динамики точки
при ударе. Из этого уравнения для скорости материальной точки в конце удара находим
u = v + |
1 |
|
|
. |
(12.4) |
|
|
S |
|||||
m |
||||||
|
|
|
|
|
Здесь u— конечная величина, так как v, S и m — конечные величины.
Определяем расстояние, пройденное точкой за время удара:
τ
L = ò vdt ,
0
где v — переменная скорость точки в промежутке времени (0, τ).
По теореме о среднем значении L = vсрτ.
Здесь vcp — конечная величина, τ — малая величина, поэтому можно принять L=0.
Таким образом, можно сделать следующие выводы:
1)действием конечных сил за время действия ударных сил можно пре- небречь; 2)перемещением точки за время действия ударных сил можно пренеб- речь;
3)действие ударных сил на материальную точку выражается в быст-
ром изменении величины и направления скорости точки по формуле
(12.4).
Пример. При прямом ударе точки о неподвижную преграду на нее подействовал ударный импульс S = 10н × с. Скорость точки до удара v = 8м / с, после - u = 2м / с. Найти массу точки.
Решение. Используя формулу mu - mv = S и учитывая, что скорость u
и ударный импульс направлены в обратную сторону по отношению к скорости v, получаем m × (-2) - m ×8 = -10 , откуда m=1.
166
§3. Теорема об изменении кинетического момента при ударе
По теореме об изменении кинетического момента системы dKdto = åMo (Fk(e) ),
где Ko = å(rk ´ mk υk ) — кинетический момент системы относи- тельно неподвижной точки О, åMo (Fk(e) )= å(rk ´ Fk(e) ) — главный
момент внешних сил, действующих на систему, относительно той же точки О. Суммирование проводится от 1 до k.
Обе части равенства, выражающего теорему об изменении кине- тического момента системы, умножаем на dt, заменив главный мо- мент внешних сил его выражением согласно последнему равенству.
Тогда
dKo = å(rk ´ Fk(e) )dt .
Это выражение интегрируем по времени в пределах от нуля до τ, где τ — продолжительность удара:
t = τ |
|
τ |
|
|
|
o = ò å(rk ´ |
Fk(e) )dt |
òdK |
|||
t = 0 |
0 |
|
|
Левая часть этого равенства характеризует изменение кинетиче- ского момента системы относительно точки О за время удара. Обо- значим это изменение Ko . Правую часть равенства преобразуем, изменив порядок суммирования и интегрирования и вынеся потом rk за знак интеграла. Перемещением точек системы за время удара пре- небрегаем и, следовательно, вектор rk в промежутке интегрирования (О, τ), постоянный. Таким образом, для правой части равенства
τ |
τ |
æ |
τ |
|
ö |
||||||
|
|
(e) |
|
|
(e) |
ç |
|
|
(e) |
dt |
÷ |
|
|
|
|
||||||||
òå(rk ´ Fk |
)dt = åò(rk ´ Fk |
)dt = åç rk ´ ò Fk |
÷ . |
||||||||
0 |
|
|
0 |
|
|
è |
0 |
|
|
|
ø |
τ
Так как ò Fk(e)dt = Sk(e) — внешний ударный импульс, то
0
æ |
τ |
ö |
|
|
|
|
|
|
||
åçç rk ´ ò |
Fk(e)dt |
÷÷ = å(rk ´ |
|
k(e) )= å |
|
о ( |
|
k(e) ). |
||
|
|
|||||||||
|
||||||||||
S |
S |
|||||||||
M |
||||||||||
è |
0 |
|
ø |
|
|
|
|
|
|
|
167
Окончательно
|
o = å |
|
о ( |
|
k(e) ). |
(12.5) |
K |
M |
S |
Равенство (12.5) выражает теорему об изменении кинетического момента системы при ударе. Полученный результат можно сформу-
лировать так: изменение кинетического момента системы относи-
тельно какой-либо точки за время удара равно векторной сумме моментов внешних ударных импульсов, приложенных к системе, относительно той же точки.
Этот же результат справедлив и в проекциях на оси координат. Проектируя, например, обе части равенства (12.5) на ось координат Ох, получаем
Kx = åMx ( |
|
k(e) ) , |
(12.6) |
S |
т. е. изменение кинетического момента системы относительно какой- либо оси за время удара равно сумме моментов внешних ударных им- пульсов относительно той же оси.
В частном случае, при åMо (Sk(e) )= 0 , из формулы (12.5) следует
Ko = 0 , т. е. если сумма моментов внешних ударных импульсов,
приложенных к системе относительно какой-либо точки, равна нулю,
то кинетический момент системы относительно этой точки при ударе не изменяется.
Аналогично из формулы (12.6) при åMx (Sk(e) )= 0следует
Kx = 0 , т. е. в этом случае кинетический момент системы относи- тельно оси Ох при ударе не изменяется.
§4. Изменение угловой скорости при ударе по телу, вращающемуся вокруг неподвижной оси
Ось вращения обозначим Оz, закрепленные точки А и В. При ударе по телу могут возникнуть ударные реакции RA и RВ , а следо- вательно, и ударные импульсы SA и SB . Угловую скорость тела в на- чале удара обозначим ω0, в конце удара ω.
По теореме об изменении кинетического момента системы, при ударе в проекциях на ось вращения Оz
Kz = åMz ( |
|
k(e) ) . |
(12.7) |
S |
168

Заметим, что ударные импульсы SA и SB не создают моментов
относительно оси вращения и в правую часть последнего равенства входят моменты только заданных (активных) ударных импульсов.
Известно, что кинетический момент тела, вращающегося вокруг неподвижной оси, относительно оси вращения определяется по фор- муле KZ = JZω, где Jz — момент инерции тела относительно оси вра-
щения. Кинетический момент тела относительно оси вращения в на- чале удара, следовательно, равен JZω0 , в конце удара JZω. Изменение
кинетического момента за время удара |
|
||
KZ = JZω − JZω0 = JZ (ω − ω0 ). |
(12.8) |
||
Уравнение (12.8) окончательно примет вид |
|
||
JZ (ω − ω0 ) = åMz ( |
|
k(e) ) , |
(12.9) |
S |
|||
т. е. произведение момента инерции тела относительно оси вращения
на изменение угловой скорости за время удара равно сумме моментов внешних ударных импульсов, приложенных к телу, относительно оси вращения.
Пример. Стержень АВ длиной L и массой m вращается с угло- вой скоростью ω как это показано на рис.12.2. После удара кон- цом В о неподвижную преграду стержень останавливается. Найти импульс ударной реакции.
Из уравнения (12.9) JZ (ω - ω0 ) = åMz (Sk(e) ) получаем JZω = S× L.
ВВспоминая, что момент инерции
А |
|
стержня JZ = mL2 |
получаем, что |
|||||
|
||||||||
|
|
3 |
|
|
|
|||
|
|
ω |
|
mL2 |
× ω = S× L, откуда S = |
mLω |
. |
|
|
|
|
|
|||||
|
|
Рис. 12.2 |
3 |
3 |
||||
|
|
|
|
|
||||
§5. Теорема об изменении кинетической энергии при ударе
Теорема Кельвина (теорема импульсов)
Прямое применение теоремы об изменении кинетической энергии системы для случая удара невозможно, так как перемещением точек за время удара пренебрегаем и, поэтому, нельзя подсчитать работу по силам и перемещениям точек. Так как ударные силы представляются их импульса- ми, то, очевидно, нужно выразить работу сил через их импульсы.
169

По теореме об изменении количества движения материальной точки за промежуток времени от момента t1 до момента t2 имеем:
|
|
|
|
|
t 2 |
|
|
|
|
|
|
|
|||||||
mv2 − mv1 = ò |
|
|
|
|
|
|
|
|
|||||||||||
Fdt = S . |
|
||||||||||||||||||
|
|
|
|
|
|
t1 |
|
|
|
|
|
|
|
||||||
Умножаем скалярно это равенство на v2 и v1 и получаем: |
|
||||||||||||||||||
mv2 |
− mv v |
|
= |
|
|
v |
|
, |
|
|
|
|
|
||||||
2 |
S |
2 |
|
|
|
|
|
||||||||||||
2 |
|
|
|
1 |
|
|
|
|
r |
|
|
|
|
|
|
||||
mv v |
2 |
− mv |
2 |
= Sv . |
|
|
|
|
|
|
|||||||||
1 |
|
|
1 |
1 |
|
|
|
|
|
|
|||||||||
Сложив эти равенства и разделив на 2, находим |
|
|
|
|
|||||||||||||||
mυ2 |
mυ2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
= |
|
S(v |
+ v |
|
|
), |
(12.10) |
||||||||||||
2 − |
|
|
1 |
|
|
2 |
|||||||||||||
2 |
|
|
2 |
|
2 |
1 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
но по теореме об изменении кинетической энергии левая часть этого равен- ства представляет работу А силы F на перемещении точки за рассматри- ваемый промежуток времени. Таким образом,
A = 12 S(v1 + v2 )
т. е. работа силы, приложенной к точке за какой-либо промежуток
времени, равна скалярному произведению импульса силы за этот промежуток времени на полусумму начальной и конечной скоро-
стей точки. Эту теорему называют теоремой Кельвина.
|
|
|
|
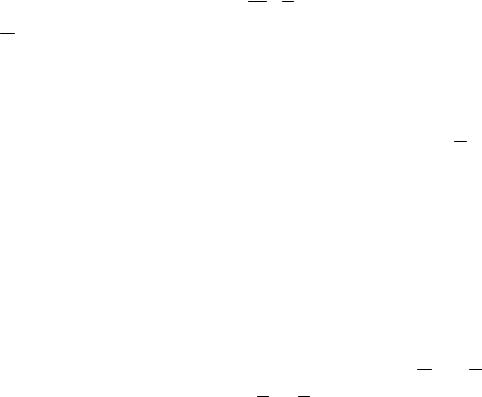
§6. Удар точки о неподвижную |
|
n |
|
|
гладкую поверхность и опытное оп- |
|
|
|
||
|
|
u |
|
ределение коэффициента восстанов- |
un |
|
ления |
||
|
β |
|
|
Материальная точка ударяется о глад- |
|
|
|
|
|
|
S |
uτ |
τ |
кую неподвижную поверхность, имея в на- |
|
|
чале удара скорость v . Определим ско- |
||
|
|
vτ |
|
|
|
|
|
||
А |
|
|
рость этой точки в конце удара u если уп- |
|
|
α |
|
|
ругие свойства поверхности характеризу- |
|
|
|
ются коэффициентом восстановления k. На |
|
|
|
v |
|
рис.12.3 точка А — место удара матери- |
υn |
|
альной точки о поверхность, ось An — |
||
|
|
нормаль к поверхности с положительным |
||
|
|
|
|
направлением вверх, ось Аτ — касательная |
Рис. 12.3 |
|
|
к поверхности, расположенная в плоско- |
|
170