

Маслов А.В., Гордеев А.В., Батраков Ю.Г. - Геодезия
.pdfответственно à è b известно на планшете (рис. 7.7). Придя с мен-
зулой в точку À, центрируют планшет, приводят его поверхность в горизонтальное положение и ориентируют, приложив ребро л˝и- нейки кипрегеля к точкам à è b, и, вращая планшет, визируют на точку Â (ðèñ. 7.7, à). После этого, приложив ребро линейки кипре-
геля к точке à, визируют на точку Ñ, положение которой опреде-
ляют на планшете, и прочерчивают линию вдоль ребра линейк˝и. В результате этих действий в точке À измерен и одновременно в точке à построен горизонтальный угол.
Затем переходят с мензулой в точку Â, центрируют планшет,
приводят его поверхность в горизонтальное положение и ор˝иентируют по линии ba (ðèñ. 7.7, á). Теперь, приложив ребро линейки
кипрегеля к точке b, визируют на точку Ñ и прочерчивают линию вдоль ребра линейки. В результате этих действий в точке Â èçìå-
рен и одновременно в точке b построен горизонтальный угол. Пересечение двух прочерченных линий дает положение искомо˝й
точки ñ.
Для контроля и повышения точности засечки прочерчивают направление на определяемую точку с третьей станции (с тр˝етьей исходной точки). Три направления должны пересечься в одно˝й
точке, что свидетельствует не только о правильности устан˝овки планшета в рабочее положение на станциях, но и о правильно˝сти
нанесения исходных точек на планшет. При выполнении засеч˝ек не допускают, чтобы угол между направлениями линий, в пересе- чении которых получается положение определяемой точки, б˝ыл
менее 40 и более 140°.
Вычисление высоты определяемой точки Ñ производят переда- чей ее не менее чем с двух ближайших исходных точек, наприм˝ер
с точек À è Â с известными высотами ÍÀ è ÍÂ. Для этого на станциях в исходных точках измеряют полным приемом углы накло˝на
νÀÑ è νÂÑ, высоту знака υÑ в точке Ñ и высоту прибора на точках À è Â, iÀ è iÂ, а после получения положения точки ñ на планшете измеряют горизонтальные проложения sac è sbc.
Рис. 7.7. Схема выполнения прямой засечки при мензульной съе˝мке
211
Значения высоты точки Ñ вычисляют согласно формуле (7.6):
= |
+ |
= |
+ |
ν |
+ |
υ |
+ |
|
= |
+ |
= |
+ |
ν |
+ |
υ |
+ |
(7.11) |
Åñëè ÍÀ è ÍÂ получены по результатам геометрического ниве-
лирования, то допустимость расхождения в значениях высот˝ы вы-
числяют по формуле, м,
= |
|
≤ |
(7.12) |
|
|
|
|
в которой sêì — сумма двух расстояний, км, от исходных точек до определяемой. Если высоты исходных точек получены тригон˝о-
метрическим нивелированием, то допуск, предусмотренный ф˝ормулой (7.12), можно увеличить в полтора раза. Если расхождение˝ Í допустимо, то за окончательное значение высоты принимают
среднее арифметическое.
Боковая засечка состоит в определении положения точки по
двум исходным точкам с двух станций, из которых первая нах˝о- дится в исходной точке, вторая — в определяемой.
Боковую засечку применяют, когда одна из исходных точек,
например Â (см. рис. 7.7), является постоянным предметом местности и не доступна для станции (шпиль здания, антенна и др˝.), или, чтобы не делать лишней станции, мензулу устанавливаю˝т на определяемой точке Ñ, с которой тут же производят съемку ситуа-
ции и рельефа.
При боковой засечке на одной станции, например в точке À, выполняют все те же действия, что и при прямой засечке (см. рис. 7.7, à), после чего мензулу переносят в точку Ñ, центрируют
планшет приближенно, так как положение точки ñ на планшете еще неизвестно, приводят в горизонтальное положение и ори˝ен-
тируют его по линии ñà, прочерченной на станции À (рис. 7.8). Приложив ребро линейки кипрегеля к точке b, визируют на точку Â местности и вдоль ребра линейки прочерчивают линию. В пере-
сечении линий, прочерченных с точек à è b, получают положение
искомой точки ñ.
Если положение точки ñ оказалось над точкой Ñ (планшет центрирован правильно) или погрешность центрирования не превышает половины точности масштаба, то решение задачи п˝о определению положения точки ñ считают окончательным, в противном случае уточняют центрирование планшета, снова при˝водят в горизонтальное положение, ориентируют его и визиров˝а-
нием на точку Â получают окончательное положение точки ñ.
Практически положение точки ñ на планшете всегда можно указать с точностью до 3…5 см, а следовательно, достаточно точн˝о
212

центрировать планшет, поэтому необходи-
мости в уточнении центрировки почти не возникает.
При определении положения точки способом боковой засечки соблюдают те же правила контроля, что и при прямой засечке.
Вычисляют высоту определяемой точки Ñ так же — передачей ее не менее чем с
двух ближайших исходных точек, но с небольшими углами наклона ν, так как погрешности определения расстояния s íà
планшете вызывают большие погрешности вычисления превышений при больших уг-
лах наклона. Но при боковой засечке превышение hAC контролируют вычислением обратного превышения hCA по правилу: прямое превышение должно быть равно обратному по величине, но пр˝о-
тивоположно по знаку.
В данном случае прямое превышение вычисляют согласно фор˝- мулам (7.11):
hïðÿì = hAC = sac tg νAC + iA – υC + fAC, hîáð = hCA = sac tg νCA + iC – υA + fAC.
Расхождение между ними вычисляют по формуле
h = hïðÿì + hîáð. |
(7.13) |
Допустимость расхождения вычисляют по формуле
häîï = (0,04s100) ì, |
(7.14) |
т. е. 4 см на каждые 100 м расстояния.
Если расхождение допустимо, то из двух значений превышени˝я выводят прямое среднее
= |
|
(7.15) |
|
Ï ð è ì å ð 1: hAC = +5,07 ì, hCA = –4,94 ì, s = 482 ì.
h = +5,07 + (–4,94) = +0,13 ì. häîï = 0,04 · 4,8 = 0,19 ì,
= + = +
213

Ï ð è ì å ð 2: hïðÿì = +0,04 ì, hîáð = +0,13 ì, s = 567 ì.
h = +0,04 + 0,13 = +0,17 ì, häîï = 0,04 · 5,7 = 0,23 ì,
= |
|
+ |
+ |
= |
|
Высоту точки Ñ получают по формулам:
=+
= = ν + υ + (7.16)
Знак «минус» перед hCB означает, что высота точки передается
«на себя», т. е. на станцию в определяемой точке (если точка˝Â является постоянным предметом местности, когда высота Í îòíî-
сится к верху знака, на который визируют при измерении угл˝а наклона νÑÂ, то принимают υ = 0).
Допустимость расхождения Í можно вычислить по формуле
(7.12), хотя она будет несколько (≈ на 25 %) преувеличена, так как hÀÑñð вычисляют точнее, чем hAC è hCA. При допустимости расхождения выводят среднее арифметическое значение высоты.
7.9. ГРАФИЧЕСКОЕ РЕШЕНИЕ ЗАДАЧИ ПО ОПРЕДЕЛЕНИЮ ПОЛОЖЕНИЯ ТОЧКИ ОБРАТНОЙ ЗАСЕЧКОЙ
(ЗАДАЧА ПОТЕНОТА)1
Обратная засечка состоит в определении положения четвертой по трем исходным с одной станции в определяемой точке.
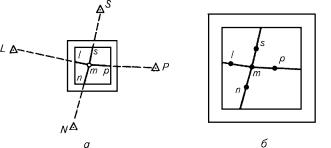
Для определения положения точки Ì (ðèñ. 7.9, à) по трем исходным L, S è P (левой, средней и правой) надо измерить на местности в точке Ì при помощи какого-либо прибора (теодолита, мензулы) углы α è β. Если известны координаты пунктов L, S è Ð
è óãëû α è β, то задачу по вычислению координат точки Ì можно
решить аналитическим способом. Таких способов существуе˝т
очень много и некоторые из них описаны в главе 15.
Если пункты L, S è Ð нанесены на план (планшет) по координатам или получены на планшете при построении съемочного˝
обоснования, то, зная значения углов α è β, положение точки Ì на плане (планшете), можно определить графическими построениями.
1Обратная засечка названа задачей Потенота по имени франц˝узского математика, предложившего ее и жившего в конце XVII и в начале XVIII стол˝етия.
214

Рис. 7.9. Схема графического решения задачи Потенота
Теория графического решения задачи состоит в следующем. Пусть на плане точки l, s è ð (ðèñ. 7.9, á) являются изображениями
пунктов L, S è Ð местности, а ò — положение определяемой точ-
êè Ì. Предположим, что положение точки ò найдено. Проведем через точки l, m è ð окружность, продолжим линию sm до пересе- чения с этой окружностью и получим вспомогательную точку˝z.
Соединим точки l è ð между собой и с точкой z прямыми линия-
ìè. Óãëû 180° – α è 180° – β при точке ò соответственно равны углам при точках l è ð как углы, опирающиеся на одни и те же дуги.
Следовательно, угол между стороной pl и продолжением стороны zp равен углу α , а угол между стороной lp и продолжением сторо-
íû zl равен углу β. Óãëû ϕ è γ при точке z равны таким же углам соответственно при точках ð è l.
На этом основании можно построить положение искомой точки ò на плане (планшете) по углам α è β следующим обра-
зом. Левый угол α, измеренный на местности при точке Ì (ñì.
ðèñ. 7.9, à), надо построить на плане (например, при помощи транс-
портира) при правой точке ð относительно линии pl (ðèñ. 7.9, â).
Затем правый угол β, измеренный при точке Ì, надо построить на
плане при левой точке l относительно линии lp. В пересечении
двух линий, проведенных из точек l è ð, получается вспомогательная точка z. Проводят прямую sz, которая замечательна тем, что на ней лежит искомая точка ò. Значит, если поставить мензулу в точ- ке Ì местности, приложить ребро линейки кипрегеля к точкам s è z на планшете и, повернув планшет, визировать на точку S местности, то он будет ориентирован. Поэтому sz называют линией ориентирования. Проведя окружность через точки l, p è z, в пересече-
нии ее с линией sz получают положение искомой точки ò.
Положение точки ò можно получить и так. Измерив транспортиром угол ϕ, надо построить его при точке ð относительно линии pl и в пересечении линии, проведенной из точки ð, с линией sz получим искомую точку ò. Для контроля можно измерить угол γ при точке z и построить его при точке l относительно ли-
215
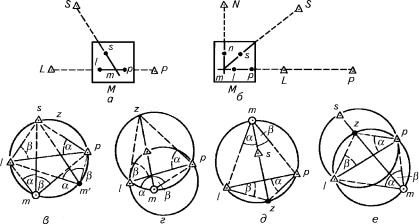
íèè lp, и в пересечении линии, проведенной из точки l, с линией sz получим положение точки ò. Три направления должны пересечься в одной точке.
Таково графическое решение задачи по определению точки п˝о трем исходным. Его можно проделать в камеральной обстанов˝ке на плане, если измерены углы α è β на местности.
При решении этой задачи на мензульном планшете в поле при˝- меняют различные способы (приемы), которые описаны ниже.
При этом обратим внимание на случаи, когда решение задачи˝ по
определению точки по трем исходным дает надежный результ˝ат и когда этот результат получается надежным.
Наиболее благоприятным случаем решения задачи Потенота˝
будет тот, когда определяемая точка Ì будет находиться внутри
треугольника LSP, потому что в этом случае линия ориентирования sz всегда длиннее линии засечек lm è pm.
Задача решается одним поворотом, если определяемая точка ò находится на стороне треугольника lsp, например на стороне lp
(ðèñ. 7.10, à). В этом случае сумма углов α + β = 180°, точка z окажется вне планшета, так как lS è pS параллельны. Поэтому, встав с
мензулой в створ линии LP, ориентируют планшет по линии pl, после чего, приложив ребро линейки кипрегеля к точке s è âèçè-
руя на пункт S местности, боковой засечкой получают положение точки ò. Этот случай будет благоприятным, если линия ориенти-
рования lp длиннее линии засечки sò.
Одним поворотом решается задача и в случае, если определя˝е-
мая точка находится на продолжении стороны треугольника˝lsp
(ðèñ. 7.10, á). Планшет ориентируют по линии lp, засекают визи-
Рис. 7.10. Решения задачи Потенота одним поворотом планшета (à, á), случай, когда решение задачи невозможно (â), благоприятное (ã, ä) и неблагоприятное (å) расположение определяемой точки для решения задачи Потенота
216
рованием на пункт S и для контроля на пункт N. Такой контроль
нужен и в других случаях определения положения точки обра˝тной засечкой.
Решение задачи невозможно, если определяемая точка ò лежит на окружности, проходящей через точки l, s è ð (ðèñ. 7.10, â), ïîòî-
му что в этом случае точка z совпадает с точкой s, значит, длина линии ориентирования sz = 0, óãëû α è β в любой точке на окруж-
ности как опирающиеся на одни и те же дуги оказываются рав˝ными, поэтому положение точки ò становится неопределенным. Эту
окружность называют опасным кругом и решают задачу по другим
пунктам, благоприятно располагающимся относительно опр˝еделяемой точки.
Если определяемая точка ò находится вне треугольника lsp, íî
внутри окружности, проходящей через точки l, s è ð (ðèñ. 7.10, ã),
то этот случай будет благоприятным, при этом линия ориент˝и- рования sz длиннее sm. Аналогично и в случае, когда точка ò
лежит за окружностью lsp против угла у точки s (èëè l, èëè ð, ðèñ. 7.10, ä).
Случай всегда неблагоприятный, когда точка ò лежит за окружностью lsp против стороны lp (èëè ls, èëè ps, ðèñ. 7.10, å). Â
этом случае sz всегда короче sm.
Задачу также можно решить способом приближений: после при-
ближенного (на глаз) или по буссоли ориентирования планше˝та прикладывают ребро линейки кипрегеля к точке s, визируют на
пункт S местности и прочерчивают линию. Затем делают то же,
визируя на пункты L è Ð местности. Если планшет был ориентирован точно, то все три линии пересекутся в одной точке ò (ðèñ. 7.11, à), которая и будет определяемой точкой, в противном
случае получится треугольник погрешностей. При неточной ориен-
тировке треугольника погрешностей может не получиться, е˝сли
определяемая точка лежит на опасном круге или в непосредс˝твенной от него близости.
Получение первого треугольника погрешностей означает о˝пределение положения точки в первом приближении. Задача сост˝оит и в том, чтобы, уточняя ориентировку небольшими поворотам˝и планшета и проводя каждый раз направления с трех точек, ум˝еньшать треугольник погрешностей до тех пор, пока направлени˝я пе-
ресекутся в одной точке.
При уточнении ориентировки надо знать, в какую сторону по˝-
ворачивать планшет. При повороте планшета в нужную сторон˝у
следующий треугольник погрешностей уменьшится, а в проти˝во-
положную сторону — треугольник увеличится. Для определения направления поворота планшета будем рассуждать так. Полу˝чив треугольник погрешностей внутри фигуры lsp (ðèñ. 7.11, á), видим, что для его уменьшения планшет следует вращать против ход˝а ча- совой стрелки, т. е. искомую точку ò1 намечаем внутри получен-
ного треугольника погрешностей. После этого ребро линейк˝и
217

Рис. 7.11. Случай решения задачи Потенота способом приближен˝ий
кипрегеля прикладывают к точкам ò1 è s. Возле точки ò1 по ребру
линейки кипрегеля проводят короткую линию, вращая планше˝т, визируют на пункт S местности и закрепляют его. Затем, визируя через точку l на пункт L, через точку ð на пункт Ð, проводят линии. Если они все пересекутся в одной точке, то задача решен˝а, в противном случае намечают снова точку внутри полученног˝о треугольника погрешностей и т. д.
Если определяемая точка находится на стороне треугольни˝каlsp
или вблизи нее, то при неточной ориентировке планшета вме˝сто
треугольника погрешностей получаются две параллельные ˝линии,
проходящие через точки l è ð. По расположению этих линий тоже
легко судить, в какую сторону надо поворачивать планшет, ч˝тобы эти линии слились. Например, глядя на рисунок 7.11, â, можно со-
образить, что планшет надо вращать против хода часовой ст˝релки. Если определяемая точка находится вне треугольника lsp, но внутри окружности lsp (ðèñ. 7.11, ã), то планшет надо вращать против хода часовой стрелки. Практически в этом случае после˝ полу- чения треугольника погрешностей точку ò1 намечают по другую
218
сторону линии ориентирования. Так же поступают и в случае˝, по-
казанном на рисунке 7.11, á.
При положении определяемой точки на опасном круге решение задачи невозможно.
Если определяемая точка лежит за окружностью lsp, но против
стороны треугольника lsp, то точку намечают по ту же сторону линии ориентирования, по какую получился треугольник погрешно˝стей.
Менее распространенные способы:
пары треугольников от предыдущего отличается тем, что после
получения первого треугольника погрешностей немного по˝вора-
чивают планшет и получают второй треугольник погрешност˝ей. Соединяя соответствующие вершины этих треугольников пр˝я- мыми линиями, в пересечении получают положение искомой
точки ò;
Болотова от предыдущих отличается тем, что положение точки определяют по любому числу исходных пунктов, но не меньше˝
трех. Для определения положения точки на мензульном планш˝ете прикрепляют лист восковки, на котором приближенно относи˝-
тельно исходных пунктов, видимых сквозь восковку, намечаю˝т точку ò. Прикладывая к этой точке ребро линейки кипрегеля,
визируют на все исходные пункты и прочерчивают направлен˝ия (рис. 7.12, à). После этого передвигают восковку на планшете
так, чтобы совместились направления с соответствующими и˝ли исходными пунктами (рис. 7.12, á), изображенными на планше-
те. Когда это совмещение достигнуто, точку ò с восковки пере-
кладывают на планшет. Наиболее точно точку определяют по наибольшему числу ближайших пунктов, расположенных вокр˝уг определяемой точки.
Все случаи благоприятного и неблагоприятного решения за˝да-
чи, рассмотренные для способа поворотов планшета, справед˝ливы
и для всех остальных способов графического и аналитическ˝ого решения этой задачи.
После определения положения точки ее высоту определяют передачей «на себя» по формуле (7.16) не менее чем с двух ближайших пунктов и из полученных значений высоты, если расхождения между ними допустимы, выводят среднее арифмети- ческое.
Рис. 7.12. Решение задачи Потенота способом Болотова
219

Обратную засечку обычно применяют для определения положения переходной точки для съемки ситуации и рельефа, при˝ полевом контроле и приемке работы от исполнителя.
7.10. ПОНЯТИЕ О ГЕОДЕЗИЧЕСКИХ СЕТЯХ ДЛЯ МЕНЗУЛЬНОЙ СЪЕМКИ. ГЕОМЕТРИЧЕСКИЕ СЕТИ
В зависимости от площади снимаемой территории, масштаба
съемки и требуемой точности геодезической сетью могут бы˝ть1:
триангуляция (см. рис. 2.1, à); полигонометрия (см. рис. 2.1, á, â); теодолитные полигоны и ходы;
геометрическая сеть, представляющая систему треугольни˝ков и
отличающаяся от триангуляции тем, что при ее построении п˝оложение пунктов получают на планшете графически прямой или˝ бо-
ковой засечкой; мензульные ходы, прокладываемые в закрытой местности, от-˝
личаются от теодолитных тем, что углы между сторонами мен˝зульного хода не измеряют теодолитом, а строят на планшете по н˝а-
правлениям сторон в процессе проложения мензульного ход˝а. Линии чаще всего измеряют нитяным дальномером и результаты˝ из-
мерений (горизонтальные проложения) откладывают на план˝шете по направлениям линий хода.
Каждый из этих видов может служить самостоятельной геоде˝-
зической сетью мензульной съемки, однако на больших площа˝дях геометрическая сеть и мензульные ходы опираются на пункт˝ы триангуляции, полигонометрии и теодолитных ходов.
Высоты пунктов всех видов геодезической сети определяют˝
проложением ходов геометрического нивелирования или тр˝игонометрическим нивелированием.
Геометрическую сеть как съемочное обоснование обычно строят в открытой местности для сгущения геодезической сети, ˝когда имеющиеся пункты триангуляции, полигонометрии и теодоли˝т- ных ходов расположены редко и не обеспечивают необходиму˝ю густоту для съемки местности. Например, при съемке в масшт˝абе 1:10 000 нужно, чтобы каждый квадратный километр был обеспе-
чен хотя бы одним пунктом любого вида геодезической сети,˝
включая съемочное обоснование. Длины сторон треугольник˝ов
геометрической сети составляют примерно одну десятую зн˝амена-
теля численного масштаба, выраженную в метрах. Поэтому пр˝и
построении сети в масштабе 1:10 000 длина стороны треугольник˝а
геометрической сети примерно равна 1 км, в масштабе 1:5000 —
соответственно 0,5 км. В масштабе 1:2000 и крупнее геометриче- скую сеть обычно не строят или ограничиваются установкой˝ нескольких вех и использованием постоянных предметов мест˝ности
1Более подробно о геодезических сетях для съемок см. главу˝ 10.
220