

§ 1.7 Разветвление по входу и выходу.

a) увеличение числа входов по И

И-НЕ
И-ИЛИ-НЕ
б)
В любом случаенеобходимо
учитывать:
любом случаенеобходимо
учитывать:
1) нагрузочные токи и емкости, которые влияют на характеристики схемы и, следовательно, на форму сигнала;
2) каждая дополнительная линейка элементов (каскад) может инвертировать сигнал и вносить дополнительную задержку распространения сигнала;
3) при проектировании узлов вводятся оценочные параметры для сравнения полученных узлов:
•
суммарная
задержка распространения сигнала:
![]() (n
– число каскадов, tзд.р.
– задержка
распространения);
(n
– число каскадов, tзд.р.
– задержка
распространения);
• число входов или объем оборудования, число выходов или коэффициент разветвления;
• стоимость оборудования.
§ 1.8 Гонки.

Рассматривая данную схему (А – четное число элементов, В – нечетное число элементов) и анализируя ее методом алгебры логики, приходим к выводу, что на выходе всегда должен быть ноль. Но в действительности этого может и не быть, поскольку ветви этой схемы могут иметь различное время задержки сигнала (tА и tВ), в результате чего на выходе OUT может получиться ложный сигнал.

На выходе появляется помеха, которая по длительности может быть больше, чем, например, время срабатывания последующей схемы и, следовательно, может запомнится в других узлах.
Совершенно аналогично, когда tА tВ.
Такое явление – гонки (состязания) – при достаточно большой длине помехи она может быть воспринята последующей схемой как логический сигнал.
Методы борьбы с гонками:
Борьбу с гонками можно вести тремя методами:
1 метод: тактирование – по всему устройству разводится единая система тактирующих (синхронизирующих) сигналов, в частности, при двухфазной синхронизации – сигналами С1 и С2, обычно сдвинутых относительно друг друга на полпериода.


Суть метода: входной сигнал привязывается к синхронизирующему сигналу С1, далее сигнал может задерживаться по цепям А и В, и может возникнуть помеха; но на выход Y она не попадет, т.к. выход (работа выхода) привязан к сигналу С2, т.е. на выход попадает сигнал после окончания всех переходных процессов.
Требования к С1 и С2: обязателен временной сдвиг между С1 и С2, такой, чтобы он превышал самую большую задержку в цепях А и В. Такой способ управления часто называют стробированием (тактированием).
2 метод заключается в построении противогоночных схем, примером которых может быть схема JK-триггера.
3 метод заключается в учете минимального времени задержки.
Например, цепь А длиннее цепи В, тогда если tA>>tB, настолько, что если даже в цепь А подадут самые быстрые элементы, схема будет работать нормально.
§ 1.9 Гонки по входу.

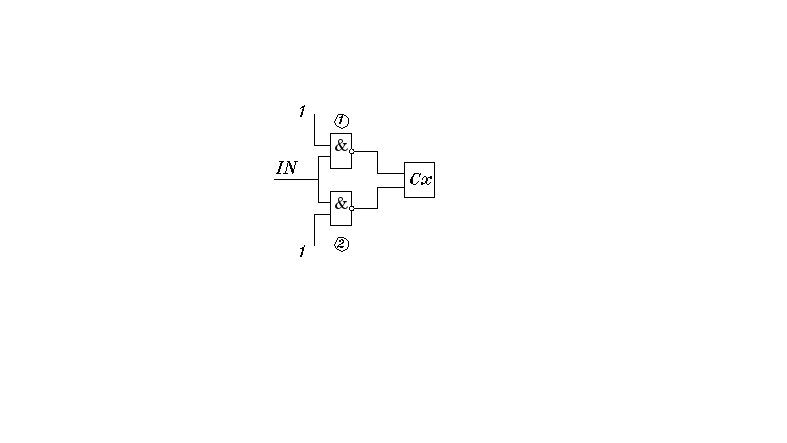
Такое явление называется гонками по входу. Оно возникает при наличии разброса по уровню срабатывания элементов 1 и 2, и излишне пологом фронте входного сигнала. Вследствие этого появляется опасный интервал, в течение которого последующая схема может понять как наличие единицы и/или нуля и выдать ложное решение.
Часто это проявляется при использовании элементов разных серий, т.е. с большим разбросом параметров.
Довольно часто явление гонок является причиной непонятных сбоев цифровых устройств.