

4.6. Автоматизація вантажопідйомних машин
Автоматизація кожного виду вантажопідйомних машин має свої особливості.
Система автоматичного керування роботою будівельних підйомників відносно проста і передбачає в основному автоматизацію окремих операцій. Знаходять застосування системи з автоматичним адресування вантажів.
У автоматичних системах керування баштовими кранами, які виконують роботи по монтажу повнозбірних споруд, знаходять застосування системи програмного керування з автоматичним адресуванням транспортованих вантажів до місця призначення. Застосування таких систем значно прискорює процес доставки вантажу.
Мостові і козлові крани, які використовуються на складах та заводах залізобетонних виробів, використовують найчастіше лише частину робочого часу. Це вимагає систем автоматизації з викликом крана та адресуванням вантажу в певне місце.
Нижче наведено конкретні приклади систем автоматизації вантажопідйомних машин.
Обмежувачі вантажопідйомності (ОВП) та вантажного моменту (ОВМ) встановлюють на стрілових, баштових та інших видах кранів для автоматичного відключення механізмів підйому та зміни вильоту стріли у випадку підняття вантажу 1,1Q , де Q - номінальна вантажопідйомність при даному вильоті. Обмежувачі вантажного моменту стрілового крана, який має декілька вантажних характеристик (з виносними опорами та без них, зі стрілами різної довжини), повинні забезпечувати роботу по кожній із цих характеристик.
Крани мостового типу оснащені обмежувачами вантажопідйомності, які спрацьовують при 1,25Q , якщо можливе перевантаження крана за технологією виконуваних робіт. На кранах із гідроприводом функцію обмежувача може виконувати запобіжний клапан. Після спрацювання ОВП та ОВМ повинні бути можливими спуск вантажу або зменшення вильоту ОВП не повинні реагувати на короткі динамічні імпульси, що досягається за допомогою гідро- та пневмодемпферів чи витримкою часу спрацювання електричним шляхом.
Конструкції ОВП та ОВМ різноманітні і розрізняються:
за кількістю параметрів, при недопустимому збільшенні яких обмежувач спрацьовує: один для ОВП (вага вантажу); два, три, чотири для ОВМ (вага вантажу, кут нахилу стріли, довжина телескопічної стріли, дуже рідко - кут нахилу основи крану);
за способом порівняння фактичних параметрів з граничними, залежно від якого розрізняють обмежувачі механічні (вантажні, пружинні, торсійні та ін.), електромеханічні, із застосуванням тензорезисторів та підсилювачів (зокрема, електронних). На рис. 4.15 показані схеми системи автоматичного обмеження вантажного моменту стрілового крана. Система повинна попереджати перекидання крана. Умова, що не допускає перекидання:
![]() , (4.13)
, (4.13)
де Мд
- допустимий вантажний момент, який
залежить від умов експлуатації крана,
т м;
![]() - довжина стріли, м;
- кут її нахилу до горизонту, град.
- довжина стріли, м;
- кут її нахилу до горизонту, град.
Умова (4.13) контролюється автоматичною схемою при роботі крана безперервно. На структурній схемі цієї системи (рис. 4.15,б) вказано: О - об’єкт керування (стріла крана); - керований параметр; Q - збурювальна дія; РО - регулюючий орган (механізми зміни вильоту та підйому вантажу); ВМ - виконавчий механізм (двигуни механізму підйому та лебідки зміни вильоту); ПР1, ПР2 - функціональні перетворювачі; П - підсилювач (поляризоване реле); ЗД - задавач (набір резисторів з перемикачем); ДЗ - датчик зусиль; ДК - датчик кутового положення стріли; СП - підсилювач.
Датчик зусиль 3 (рис. 4.16,а) встановлюється в основному в канатному багатокутнику, який утворюється канатними відтяжками 4 та розпірками 2. Канатні відтяжки утримують стрілу й кріпляться у верхній її частині з одного боку та до обойми стрілового поліспаста 1 з другого. У даному

Рис. 4.15. Схеми системи автоматичного обмеження вантажного моменту:
а - принципова; б - структурна

Рис. 4.16. Установка (а) та конструкція (б) ДЗ, конструкція ДК (в):
1 - обойма стрілового поліспаста; 2 - розпІрка; 3 - ДЗ; 4 - канатні відтяжки кріплення стріли; 5 - динамометричне кільце; 6 - реостат; 7 - стріла; 8 - повідок; 9 - кулачок; 10 - реостат
обладнанні в якості
датчика зусиль використовується
динамометричне кільце 5 (рис. 4.16, б). При
зміні ваги вантажу Q змінюється зусилля
у відтяжках, що призводить до зміни
деформації динамометричного кільця.
Ці деформації через важильну систему
змінюють положення движка реостата 6.
Таким чином, реалізується залежність
![]() .
.
Для зміни вильоту стріли використовується кулачковий датчик ДК (рис.4.16,в).
При зміні кута нахилу стріли 7 крана за допомогою повідка 8 та кулачка 9 повертається рухомий контакт реостата 10. Вихідний параметр датчика - опір Ra . Необхідний режим роботи ДК (uo) забезпечується підключенням резисторів R1....R8 задавача ЗД (рис. 4.15,а).
Датчики ДЗ, ДК та резистори задавача для перевірки умов (4.13) увімкнені в мостову схему, до виходу якої підключено поляризоване реле КР , яке виконує у схемі роль нуль-органа й підсилювача сигналів. Датчики ДЗ, ДК, задавач та нуль-орган утворюють функціональний перетворювач ПР1, який формує сигнал ucd. Цей сигнал характеризує виконання умови (4.13).
При роботі крана в режимі, який задовольняє умову (4.13), на поляризоване реле КР подається достатній сигнал необхідної полярності, що створює умови для подачі напруги uд на двигун лебідки зміни вильоту та на двигун механізму підйому. Це відбувається в такій послідовності: контакт 1КР подає живлення на котушку реле часу КТ1, яке із заданою витримкою часу контактом 1КТ1 вимикає реле часу КТ2. Останнє з витримкою часу контактом 1КТ2 подає напругу на котушку проміжного реле К, яке, увімкнувши свої контакти 1К, 2К, 3К через штепсельне рознімання подає напругу uд в ланцюг живлення двигунів механізмів підйому вантажу й зміни вильоту, одночасно з цим засвічується зелена лампа HL1, яка сигналізує про нормальну роботу крана.
При невиконанні умови (4.13) вихідна напруга мосту змінює свою полярність, внаслідок чого реле КР розмикає свої контакти 1КР. Це призводить до вимкнення двигунів механізмів підйому вантажу та зміни вильоту. При цьому тухне зелена лампа HL1 і засвічується червона HL2, вмикається звукова сигналізація ЗВ.
Ступінь наближення робочого режиму до граничного контролюється мікроамперметром А, увімкненим паралельно до котушки реле КР.
Функціональний перетворювач ПР2 зібраний на реле часу, що забезпечує стабільну роботу схеми при короткочасних перевантаженнях крана.
Випускають також обмежувачі вантажного моменту, в яких потенціометричні перетворювачі замінено на безконтактні. Обмежувач вантажного моменту для гідравлічних стрілових самохідних кранів з телескопічними стрілами має, крім ДК та ДЗ, датчик довжини стріли.

Рис. 4.17. Схема захисного приладу від аварійних вітрових навантажень:
1 - датчик швидкості вітру; 2 - вимірювальний модуль; 3, 4 - модулі індексації та затримки часу; 5 - виконавчий пристрій
У електронних обмежувачах вантажопідйомності на динамометричне кільце наклеюють два тензорезистори, зміна опору яких реєструється схемою.
Баштові крани обладнані анемометрами. Їх призначення - автоматичне ввімкнення сирени при досягненні швидкості вітру, вказаної в паспорті крана. У ряді випадків захисний пристрій від аварійних вітрових навантажень (рис. 4.17) також вимикає двигун механізму пересування крана і вмикає протиугонний пристрій (якщо такий пристрій виготовлено з електроприводом).
Датчик 1 швидкості вітру має крильчатку, вал якої з’єднаний із валом тахогенератора. Напруга, яку створює тахогенератор, пропорційна швидкості вітру. Ця напруга подається до вимірювального модуля 2, оснащеного вимірювальним приладом, шкала якого проградуйована в метрах за секунду. Сигнал u2 з вимірювального модуля подається в модуль індексації 3, який має реле К1 сигнальну лампу HL1 і передає сигнал у модуль затримки часу 4, який має реле часу КТ та сигнальну лампу HL2. Якщо час дії небезпечного вітрового навантаження перевищує витримку часу реле КТ, то воно вмикає сигнальну лампу HL2 і подає напругу u4 на проміжне реле К2 в блоці 5, яке вмикає протиугонний пристрій і вимикає двигун переміщення крана.
Захисне обладнання забезпечує межі виміру миттєвої швидкості вітру 5...20 м/с, помилки вимірювань миттєвої швидкості вітру - 1,0...0,05 м/с, точність вимірювання тривалості пориву вітру - 0,3 с.
Для захисту стрілових самохідних кранів від небезпечного нахилу на них установлюють кренометри, які сигналізують про небезпечний нахил у повздовжньому та поперечному напрямі. Повздовжній і поперечний нахили знижують стійкість крану. При поперечному нахилі, крім того, виникають додаткові крутні та згинаючі навантаження в металоконструкціях крана.
Кренометр складається з маятникового датчика (рис. 4.18,а), закріпленого на поворотній платформі крана, та релейного блока керування (рис. 4.18,б), встановленого в кабіні. В герметичному корпусі датчика на карданному шарнірі 3 підвішено маятник 6. Корпус 2 датчика нахиляється разом із краном, а маятник зберігає вертикальне положення, внаслідок чого відбувається переміщення пов’язаних із маятником повзунків 4 та 1 відносно закріплених на корпусі датчика потенціометрів П1 та П2. Потенціометри встановлені перпендикулярно один до одного й орієнтовані вздовж і впоперек стріли. У корпусі датчика залито мастило для демпферування коливань маятника, який оснащений лопастями 5.
На панелі блоку керування (рис. 4.18,б) встановлено два стрілочні прилади, які вказують значення нахилу в різних площинах, та дві сигнальні лампи. Зелена лампа HL2 світиться при кутах нахилу, які не перевищують дозволеного значення, червона лампа HL1 сигналізує про перевищення дозволеного крену в одній із площин.
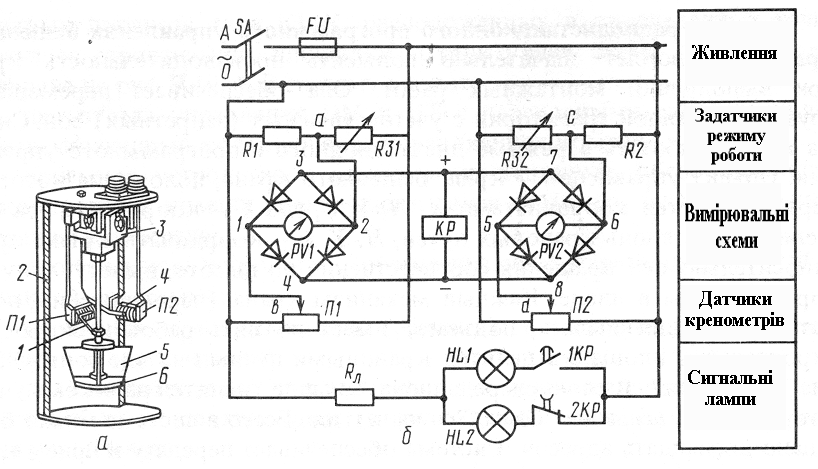
Рис. 4.18. Кренометр:
а - маятниковий датчик; 1,4 - повзунки потенціометрів П1 та П2; 2 - корпус; 3 - карданний шарнір; 5 - лопасті; 6 - маятник; б - схема блоку керування
Потенціометри П1 та П2 разом із резисторами R1, R2, R31, R32 утворюють дві мостові схеми - І та ІІ. У вимірювальній діагоналі цих систем ab і cd ввімкнено діодні мости 1234 та 5678, виходи яких 34 та 78 з’єднані паралельно з котушкою поляризованого реле КР. Діодні мости призначені для живлення котушки реле КР постійною напругою. При нахилі крана повзунки потенціометрів П1 та П2 переміщуються, порушуючи баланс мостових схем. Це призводить до увімкнення реле КР, яке контактом 1КР вмикає червону лампу HL1, а контактом 2КР - вимикає зелену лампу HL2. Значення нахилу та його напрями визначаються за допомогою приладів PV1 та PV2, які увімкнені в діагоналі 12 та 56 діодних мостів.
У дизель-електричних гусеничних кранів та деяких інших вантажопідйомних машинах встановлюється обмежувач вантажного моменту, який являє собою комплекс розглянутих пристроїв захисту і враховує усі фактори, які створюють перекидальний момент: вага вантажу, сили інерції, вітровий напір та нахил.
На самохідних стрілових кранах застосовують прилади для визначення небезпечної зони при наближенні до ліній електропередач. Прилади складаються з приймальної антени, підсилювально-виконуючого блоку та блоку сигналізації. Принцип дії грунтується на наведенні ЕДС в котушці при перетині її змінним магнітним полем.
Окрім розглянутих пристроїв захисту для кранів, які працюють на одній ділянці кранових колій, застосовуються електромеханічні та оптико-електронні прилади, які попереджують їх зіткнення. Для підтримання мінімально допустимої відстані між кранами використовується, наприклад, радіоелектронний пристрій який складається з передавача, приймача та вихідного блока. Приймач і передавач встановлені таким чином, щоб їх антени були орієнтовані в напрямі переміщення крана. При зближенні кранів на відстань, меншу дозволеної, спрацьовує реле вихідного блоку і кран зупиняється.
Система радіодистанційного програмного керування баштовим краном дозволяє значно підвищити продуктивність крана при виконанні монтажних робіт. Вона забезпечує переміщення вантажу за даною траєкторією з урахуванням небезпечних (заборонених) зон. Система може працювати в режимі дистанційного чи програмного керування. Об’єкт керування - гак баштового крана, положення якого характеризується координатами X, H, Y, , де Х - координата осі обертання крана вздовж кранових колій, H, Y, - координати гака крана відносно осі обертання відповідно по висоті, вильоті, кутові повертання стріли в плані. Кожен механізм крана (переміщення, повороту, зміни вильоту, підйому) має по п’ять робочих швидкостей. Будівельний майданчик поділяється крановими коліями на дві зони: «Споруда» та «Склад». У свою чергу зона «Споруда» поділяється на 8 ділянок (рис. 4.19, а), зона «Склад» - на чотири. Всього в системі може задано 12 адрес. Система забезпечує передачу та прийом тридцяти семи команд керування з відстані 100 м. Для передачі команд використовується радіоканал.

Рис. 4.19. Система радіодистанційного програмного керування баштовим краном:
а - схема зон обслуговування; б - структурна схема
Інформація про координати положення крюка надходить від безконтактних датчиків типу КБ-К, розташованих у певних точках крана та будівельного майданчика. Структурна схема системи показана на рис. 4.19,б. До системи входять:
два пульти керування ПМ та ПТ із переносними радіостанціями, які забезпечують формування керуючих команд;
приймальний пристрій з двома радіостанціями, які забезпечують декодування команд керування та зв’язку системи з виконавчими механізмами крана;
програмний пристрій, який забезпечує переміщення вантажу по заданій програмі;
первинні перетворювачі (датчики), які визначають координати крюка та заборонених зон;
два світлових табло для індексації номера заданої ділянки, куди повинен бути доставлений крюк (із вантажем чи без нього) при програмному керуванні.
Система дозволяє здійснювати двопостове керування краном. При цьому передача команд із пульта керування ПМ (пульт монтажника) можлива лише із зони «Споруда», а з пульта ПТ (пульт такелажника) - з зони «Склад».
Команди керування формуються на пульті керування за допомогою ключів керування.
До складу приймального пристрою, яке декодує команди керування, входять блок розгону, який забезпечує плавний розгін механізмів при керуванні краном за програмою і вхідний блок (блок реле), який комунікує електричні ланцюги крана.
Програмний пристрій керує автоматичним переміщенням вантажу з зони в зону на будь-яку, задану на пульті керування, ділянку з урахуванням заборонених зон, над якими вантаж не повинен проходити. Обходити заборонені зони дозволяє спеціальний пристрій, який складається з блоків пам’яті цих зон, блоків контролю та порівняння.
Світлове табло, окрім індексації «Адреса призначення» індукує вмикання двигунів крана.
Система в режимі програмного керування відпрацьовує 10 різноманітних циклів роботи.
Робота здійснюється таким чином. При застропуванні панелі в зоні «Склад» такелажник дистанційно керує переміщенням крана. Після застропування він піднімає панель на безпечну висоту, задає потрібну програму («Адреса призначення»)і подає сигнал «Пуск». При цьому кран автоматично доставляє панель у задану ділянку зони «Споруда» за найкоротшою траєкторією. Програма задається лише на одну операцію. Після автоматичного виконання операції з транспортування другий оператор (монтажник) дистанційно виконує операції з точного встановлення панелі та розстропування, тоді набирає «Адреса складу», виводить порожній гак у безпечну зону й переводить кран на автоматичне керування. Кран виконує операції транспортування в задану ділянку складу, згодом операції повторюються.
Для забезпечення безпеки роботи можливість одночасного керування кранами з двох пультів заблокована, виняток становлять сигнали «Аварійний стоп» та «Сирена».
Автоматизація будівельних машин - один із основних напрямів підвищення їх технічного рівня та конкурентноздатності.