

2. Центр тяжести плоской фигуры
Однородное тело, имеющее форму тонкой пластинки, можно рассматривать как плоскую фигуру.
Положение центра
тяжести плоской фигуры определяется
двумя координатами
![]() и
и![]() (рис. 48). Вес однородной пластинки
(рис. 48). Вес однородной пластинки![]() ,
где
,
где![]() – площадь плоской фигуры,
– площадь плоской фигуры,![]() – вес единицы ее площади. Разобьем
площадь фигуры на элементарные площадки,
вес каждой из которых
– вес единицы ее площади. Разобьем
площадь фигуры на элементарные площадки,
вес каждой из которых![]() ,
где
,
где![]() – площадь
– площадь![]() – ой площадки. Тогда:
– ой площадки. Тогда:
 ,
,  .
.
3. Центр тяжести линии
Пусть
![]() – вес единицы длины линии,
– вес единицы длины линии,![]() – длина линии (рис. 49).
– длина линии (рис. 49).
Тогда:
 ,
,
 ,
, .
.
10.3. Статические моменты
Статическими моментами называются выражения, стоящие в числителях формул для радиус- вектора центра тяжести. Например, из формулы
получаем статический момент относительно полюса:
![]() .
.
Статическим
моментом плоской фигуры относительно
оси
![]() (
(![]() )
называется сумма произведений площадей
элементарных площадок этой фигуры на
их ординаты (абсциссы)
)
называется сумма произведений площадей
элементарных площадок этой фигуры на
их ординаты (абсциссы)
![]() ,
, ![]() .
.
Статический
момент площади плоской фигуры относительно
оси измеряется в кубических метрах –
![]() .
.
Если известны статические моменты площади плоской фигуры относительно координатных осей, то координаты ее центра тяжести можно определить по формулам
![]() ,
, ![]() .
.
Очевидно, что если статический момент плоской фигуры относительно некоторой оси равен нулю, то центр тяжести этой фигуры лежит на этой оси.
10.4. Центры тяжести симметричных тел
Лемма. Если точки приложения параллельных сил расположены в одной плоскости, или лежат на одной прямой, то центр этой системы параллельных сил лежит в этой плоскости или лежит на этой прямой.
Доказательство.
Пусть точки приложения системы параллельных сил принадлежат плоскости
 (рис. 50), которую совместим с координатной
плоскостью
(рис. 50), которую совместим с координатной
плоскостью .
.
Тогда
![]() (
(![]() ).
Следовательно, координата центра
параллельных с
).
Следовательно, координата центра
параллельных с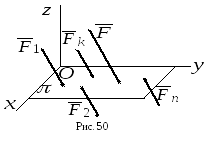 ил
ил
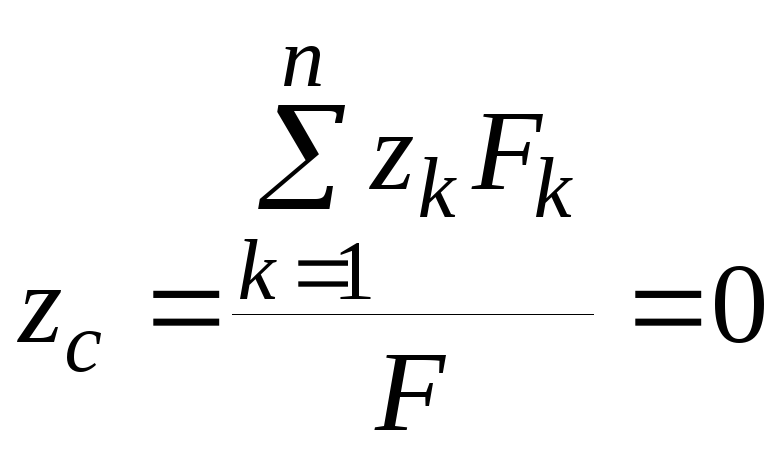 ,
,
то
есть центр системы параллельных сил
принадлежит плоскости
![]()
2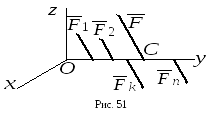 .
Пусть точка приложения параллельных
сил лежит на прямой
.
Пусть точка приложения параллельных
сил лежит на прямой![]() (рис. 51)
(рис. 51)
Тогда
![]() ,
,![]() (
(![]() ).
Вследствие этого
).
Вследствие этого![]() ,
,![]() .
Итак, точка
.
Итак, точка![]() лежит на прямой
лежит на прямой![]() .
.
Теорема.Если тело имеет плоскость материальной симметрии, либо ось материальной симметрии, либо центр материальной симметрии, то центр тяжести телалежит в этой плоскости, либо на этой оси, либо в этом центре.
Д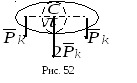 оказательство.
оказательство.
1. Плоскость материальной симметрии (рис. 52).
Пусть
![]() – плоскость симметрии Центр тяжести
каждой пары симметричных частиц лежит
в плоскости
– плоскость симметрии Центр тяжести
каждой пары симметричных частиц лежит
в плоскости![]() .
Поэтому можно рассматривать систему
параллельных равнодействующих
.
Поэтому можно рассматривать систему
параллельных равнодействующих![]() ,
точки приложения которых лежат в
плоскости
,
точки приложения которых лежат в
плоскости![]() .
.
Тогда,
в соответствии с доказанной леммой,
центр тяжести будет лежать в той же
плоскости
![]() .
.
Ось материальной симметрии.
П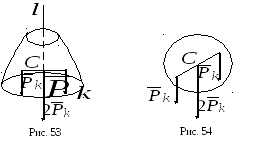 усть
усть![]() – ось материальной симметрии (рис. 53).
– ось материальной симметрии (рис. 53).
Центр
тяжести каждой пары материальных частиц
будет находиться на оси
![]() .
Тогда центр тела принадлежит оси
симметрии
.
Тогда центр тела принадлежит оси
симметрии![]() .
.
Центр материальной симметрии.
Пусть
![]() – центр материальной симметрии (рис.
54). Равнодействующая каждой пары
симметричных частиц будет приложена в
центре
– центр материальной симметрии (рис.
54). Равнодействующая каждой пары
симметричных частиц будет приложена в
центре![]() .
Тогда центр тяжести тела будет лежать
в центре материальной симметрии.
.
Тогда центр тяжести тела будет лежать
в центре материальной симметрии.
Теорема доказана.
10.5. Основные способы определения центра тяжести
1. Способ эквивалентных точек ( применяется для определения центра тяжести тел сложной формы).
Тело разбивается на части, центр тяжести которых легко определить. В центре тяжести каждой части помещается эквивалентная точка, вес которой равен весу данной части. Затем находится положение центра тяжести построенной системы эквивалентных точек.
Способ отрицательных весов (площадей, объемов) ( применяется для определения центра тяжести тел с вырезами или пустотами).
Тело мысленно дополняется до сплошного, после чего в каждом вырезе (пустоте) помещается отрицательная масса, вес которой равен весу части тела в объеме данного выреза. После этого применяется метод эквивалентных точек для сплошного тела и тел с отрицательными силами веса.