

4.2. Момент силы относительно полюса (центра, точки)
Момент силы относительно полюса характеризует меру вращательной способности силы, приложенной к телу, имеющему неподвижную точку. Так как он должен указывать направление оси возможного поворота, то это должен быть вектор.
О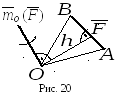 пределение:Моментом
силы относительно полюса называется
вектор (рис. 20), приложенный в полюсе,
направленный перпендикулярно плоскости,
проходящей через полюс и силу в ту
сторону, откуда видно, что сила стремится
вращать тело вокруг полюса против
часовой стрелки, и равный по величине
произведению величины силы на плечо.
Плечом называется длина перпендикуляра,
опущенного из полюса на линию действия
силы.
пределение:Моментом
силы относительно полюса называется
вектор (рис. 20), приложенный в полюсе,
направленный перпендикулярно плоскости,
проходящей через полюс и силу в ту
сторону, откуда видно, что сила стремится
вращать тело вокруг полюса против
часовой стрелки, и равный по величине
произведению величины силы на плечо.
Плечом называется длина перпендикуляра,
опущенного из полюса на линию действия
силы.
Обозначение:
![]() .
Читается так: момент силы
.
Читается так: момент силы![]() относительно полюса
относительно полюса![]() .
Величина момента
.
Величина момента![]() .
Так как плечо
.
Так как плечо![]() можно рассматривать как высоту
треугольника
можно рассматривать как высоту
треугольника![]() ,
о можно сказать, что величина момента
силы относительно полюса равна удвоенной
площади треугольника
,
о можно сказать, что величина момента
силы относительно полюса равна удвоенной
площади треугольника![]()
![]() .
.
Заметим, что эта "площадь" будет измеряться в ньютоно-метрах, так как основание треугольника–сила, а высота–длина.
Основные свойства момента силы относительно полюса
Момент силы относительно полюса не изменяется, если силу переносить вдоль ее линии действия.
Если линия действия силы проходит через полюс, то момент силы относительно полюса равен нулю.
Сумма моментов двух прямопротивоположных сил относительно одного и того же полюса равна нулю.
Эти свойства легко проверяются.
4.3. Момент силы относительно полюса как векторное произведение
Определим
положение точки приложения силы![]() вектором
вектором![]() ,
который называетсярадиус-вектором
точки приложения силы(рис. 21).
,
который называетсярадиус-вектором
точки приложения силы(рис. 21).
Тогда справедлива теорема.
Теорема.Момент силы относительно полюса равен векторному произведению радиус-вектора точки приложения силы на вектор силы, то есть
![]() .
.
Доказательство:
Такое представление момента силы относительно полюса легко проверяется. Для этого покажем, что векторы, стоящие в правой и левой частях этого равенства, равны по величине и одинаково направлены. В самом деле, модуль векторного произведения равен
![]() ,
,
где
![]() —плечо
силы. По определению вектор
—плечо
силы. По определению вектор![]() направлен перпендикулярно плоскости,
содержащей векторы
направлен перпендикулярно плоскости,
содержащей векторы![]() и
и![]() (плоскости
(плоскости![]() ),
в ту сторону, откуда кратчайший поворот
вектора
),
в ту сторону, откуда кратчайший поворот
вектора![]() к направлению вектора
к направлению вектора![]() представляется происходящим против
часовой стрелки, то есть так же, как
вектор
представляется происходящим против
часовой стрелки, то есть так же, как
вектор![]() .
Следовательно, векторы
.
Следовательно, векторы![]() и
и![]() совпадают и по величине и по направлению.
совпадают и по величине и по направлению.
4.4 Связь между моментами силы относительно полюса и оси
Теорема.Проекция
момента силы ![]() относительно полюса
относительно полюса
![]() на ось
на ось![]() ,проходящую через этотполюс, равна
моменту силы
,проходящую через этотполюс, равна
моменту силы ![]() относительно оси
относительно оси ![]() :
:
![]() .
.
Доказательство:
 Для
доказательства вычислим левую и правую
части предполагаемого равенства и
убедимся, что результаты вычислений
совпадают (рис. 22).
Для
доказательства вычислим левую и правую
части предполагаемого равенства и
убедимся, что результаты вычислений
совпадают (рис. 22).
![]()
Момент
силы
![]() относительно полюса
относительно полюса![]() перпендикулярен плоскости треугольника
перпендикулярен плоскости треугольника![]() и по величине
и по величине![]() .
Обозначим угол между
.
Обозначим угол между![]() и осью
и осью![]() через
через![]() .
Тогда проекция
.
Тогда проекция![]() на ось
на ось![]() :
:
![]()
Проведем
через полюс
![]() плоскость, перпендикулярную оси и
вічислим момент силі
плоскость, перпендикулярную оси и
вічислим момент силі![]() относительно оси
относительно оси![]() :
:
![]()
(рассматривается
случай, когда
![]() стремится повернуть плоскость вокруг
оси против хода часовой стрелки).
стремится повернуть плоскость вокруг
оси против хода часовой стрелки).
Воспользуемся
простым положением элементарной
геометрии: площадь проекции плоской
фигуры (![]() )
на некоторую плоскость (
)
на некоторую плоскость (![]() )
равна площади проектируемой фигуры
(
)
равна площади проектируемой фигуры
(![]() ),
умноженной на косинус угла между
плоскостью проекции и плоскостью
проектируемой фигуры. Угол между двумя
плоскостями – это угол между
перпендикулярами к этим плоскостям в
их общей точке, то есть угол
),
умноженной на косинус угла между
плоскостью проекции и плоскостью
проектируемой фигуры. Угол между двумя
плоскостями – это угол между
перпендикулярами к этим плоскостям в
их общей точке, то есть угол![]() .
Тогда
.
Тогда![]() .
Следовательно
.
Следовательно
![]() .
.