

3. Система сходящихся сил
3.1 Теорема о равновесии тела под действием сходящейся системы сил(векторные условия равновесия)
Теорема.Для равновесия твердого тела, загруженного сходящейся системой сил, необходимо и достаточно, чтобы главный вектор этой системы сил был равен нулю, или, что тоже самое, силовой многоугольник был замкнут.
Доказательство:
Необходимость.
Дано: тело находится в равновесии под
действием сходящейся системы сил![]() .
Следует доказать, что главный вектор
этой системы сил
.
Следует доказать, что главный вектор
этой системы сил![]() .
.
Доказательство:
В силу следствия 2 из аксиом статики,
не нарушая состояние равновесия тела,
система сходящихся сил![]() может быть заменена одной силой
может быть заменена одной силой![]() .
Теперь на тело, находящееся в равновесии,
действуют только две силы
.
Теперь на тело, находящееся в равновесии,
действуют только две силы![]() и
и![]() ,
которые на основании аксиомы 1
прямопротивоположные, то есть
,
которые на основании аксиомы 1
прямопротивоположные, то есть
![]() .
.
Тогда
![]() ,
что доказывает необходимое условие
равновесия.
,
что доказывает необходимое условие
равновесия.
Предоставляем студенту самому доказать достаточное условие равновесия сходящихся сил.
Аналитические условия равновесия тела, загруженного сходящейся системой сил
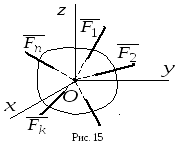
Пусть к твердому телу приложена сходящаяся система сил (рис. 15). Выберем произвольную прямоугольную систему координат с центром в точке схода и обозначим проекции сил на оси координат:
![]() ,
,
![]() ,
, ![]()
![]() .
.
Главный
вектор
![]() .
Пользуясь теоремой ( она доказывается
в курсе векторной алгебры), согласно
которой проекция суммы векторов на
некоторую ось равна сумме проекций на
ту же ось слагаемых векторов, получаем:
.
Пользуясь теоремой ( она доказывается
в курсе векторной алгебры), согласно
которой проекция суммы векторов на
некоторую ось равна сумме проекций на
ту же ось слагаемых векторов, получаем:
![]() ,
,
![]() ,
,
![]() .
.
Необходимым и достаточным условием равновесия тела, загруженного сходящейся системой сил, является равенство нулю главного вектора
![]()
Это векторное равенство эквивалентно трем скалярным
![]() ,
,
![]() ,
,
![]() .
.
Аналитические условия равновесия сходящейся системы сил могут быть сформулированы так:
Для равновесия тела, загруженного сходящейся системой сил, необходимо и достаточно, чтобы сумма проекций всех сил на каждую из координатных осей была равна нулю, то есть чтобы выполнялись три уравнения статики
1.![]() ,
,
2. ![]() ,
,
3. ![]() .
.
Теорема о трех непараллельных силах (правило трех сил)
Теорема.Если твердое тело находится в равновесии под действием трех сил, и линии действия двух сил пересекаются, то линия действия третьей силы проходит через точку пересечения первых двух, и все три силы лежат в одной плоскости.
Доказательство:
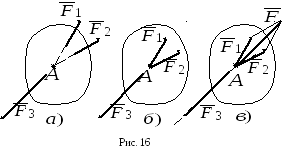 Пусть
тело находится в равновесии под действием
трех сил
Пусть
тело находится в равновесии под действием
трех сил![]() ,
,![]() и
и![]() ,
причем линии действия
,
причем линии действия![]() и
и![]() пересекаются в точке
пересекаются в точке![]() (рис.
16а).
(рис.
16а).
Согласно
следствию 1 из аксиом статики, силы
![]() и
и![]() можно, не нарушая состояние равновесия
тела, перенести вдоль их линий действия
в точку
можно, не нарушая состояние равновесия
тела, перенести вдоль их линий действия
в точку![]() (рис. 16б), а затем по аксиоме 3 заменить
одной силой
(рис. 16б), а затем по аксиоме 3 заменить
одной силой![]() ( рис. 16в), проходящей через точку
пересечения сил
( рис. 16в), проходящей через точку
пересечения сил![]() и
и![]() (точку
(точку![]() )
и лежащей с ними в одной плоскости,
причем
)
и лежащей с ними в одной плоскости,
причем![]() .
Тело находится в равновесии под действием
двух сил
.
Тело находится в равновесии под действием
двух сил![]() и
и![]() ( рис. 16в), следовательно, по аксиоме 1
они должны иметь общую линию действия,
но тогда силы
( рис. 16в), следовательно, по аксиоме 1
они должны иметь общую линию действия,
но тогда силы![]() ,
,![]() и
и![]() лежат в одной плоскости и их линии
действия пересекаются в одной точке
(точку
лежат в одной плоскости и их линии
действия пересекаются в одной точке
(точку![]() ).
).
4. Момент силы
4.1. Момент силы относительно оси
Момент силы относительно оси характеризует меру вращательной способности силы, приложенной к телу, имеющему неподвижную ось.
П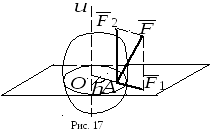 усть
в точке
усть
в точке![]() тела приложена сила
тела приложена сила![]() (рис. 17). Разложим эту силу
на две составляющих:
(рис. 17). Разложим эту силу
на две составляющих:![]() и
и![]() .
Вся мера вращательной способности силы
.
Вся мера вращательной способности силы![]() определяется составляющей
определяется составляющей![]() ,
лежащей в плоскости, перпендикулярной
оси.
,
лежащей в плоскости, перпендикулярной
оси.
Момент силы относительно оси – это число (скаляр),которое определяется следующим образом:
Проводим плоскость, перпендикулярную оси (рис. 18)
Сила проектируется на эту плоскость (проекция вектора на плоскость – вектор)
В
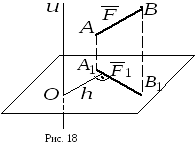 еличина
полученной проекции
еличина
полученной проекции умножается
на число
умножается
на число ,
то есть на длину перпендикуляра,
опущенного из точки пересечения оси с
плоскостью на линию действия силы.
,
то есть на длину перпендикуляра,
опущенного из точки пересечения оси с
плоскостью на линию действия силы.Полученному произведению приписывается знак «плюс», если с положительного направления оси видно, что сила стремится вращать тело вокруг оси против часовой стрелки, и знак «минус» в противном случае.
Обозначение:
![]() .
Читается так:момент силы
.
Читается так:момент силы ![]() относительно оси
относительно оси ![]() .
.
В результате приходим к следующему определению:
Моментом силы относительно оси называется число, равное произведению модуля проекции силы на плоскость, перпендикулярную оси, на плечо проекции. Момент силы относительно оси положителен, если с положительного направления оси видно, что сила стремится вращать тело против часовой стрелки, и отрицателен в противном случае.
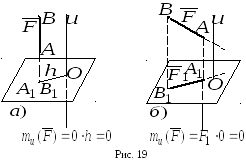 Момент
силы относительно оси равен нулю в двух
случаях (рис. 19):
Момент
силы относительно оси равен нулю в двух
случаях (рис. 19):
![]() когда проекция
силы на плоскость, перпендикулярную
оси, равна нулю, то есть когда сила и ось
параллельны (рис. 19а);
когда проекция
силы на плоскость, перпендикулярную
оси, равна нулю, то есть когда сила и ось
параллельны (рис. 19а);
![]() когда плечо проекции
когда плечо проекции
![]() равно нулю, то есть когда линия действия
силы пересекают ось (рис. 19б).
равно нулю, то есть когда линия действия
силы пересекают ось (рис. 19б).
Оба этих случая можно объединить:
Момент силы относительно оси равен нулю тогда и только тогда, когда сила и ось лежат в одной плоскости.