

Связи и их реакции
Различают тела свободные инесвободные. Твердое тело называетсясвободным, если из данного положения его можно перевести в любое смежное.Несвободнымтелом называется тело, перемещение которого в каком либо одном или нескольких направлениях ограничено.
Тела (устройства, приспособления), которые препятствуют каким либо перемещениям данного тела, называются связями, наложенными на тело. Связи, наложенные на тело, являются источником сил, действующих на это тело и называемыхреакциями связей.
О с н о в н ы е т и п ы с в я з е й
Идеально гладкая (без трения) поверхность
Поверхность
называется идеально гладкой, если она
не оказывает сопротивления соприкасающемуся
с ней телу при перемещении тела по
поверхности. Такая поверхность не дает
телу перемещаться только по направлению
нормали к этой поверхности. Поэтому
реакция
![]() (рис. 10) идеально гладкой опорной
(рис. 10) идеально гладкой опорной
п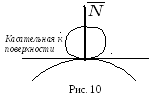 оверхности
направлена по нормали к этой поверхности.
оверхности
направлена по нормали к этой поверхности.
Таким образом, при определении реакции идеально гладкой поверхности необходимо определить одну неизвестную величину реакции, так как направление этой реакции известно. Когда говорят, что тело свободно опирается на поверхность, предполагается, что поверхность идеально гладкая.

Гибкая нерастяжимая нить (трос, цепь, канат)
Реакция гибкой, нерастяжимой и невесомой нити направлена вдоль нити, внутрь нити (рис. 11)Нить может работать только на растяжение.
Связи с неподвижной осью вращения (цилиндрический шарнир, подшипник)
С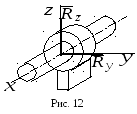 вязь
с неподвижной осью вращения – это
соединение двух тел, которое дает
возможность одному телу вращаться
относительно другого вокруг оси (рис.
12). Предполагается что
поверхности соприкасающихся тел идеально
гладкие. Такая связь препятствует
перемещениям тела, перпендикулярным
оси вращения. Однако заранее нельзя
указать направление реакции связи с
неподвижной осью вращения; можно только
утверждать, чтореакция этой связи
проходит через ось и расположена
в плоскости, перпендикулярной
оси.
вязь
с неподвижной осью вращения – это
соединение двух тел, которое дает
возможность одному телу вращаться
относительно другого вокруг оси (рис.
12). Предполагается что
поверхности соприкасающихся тел идеально
гладкие. Такая связь препятствует
перемещениям тела, перпендикулярным
оси вращения. Однако заранее нельзя
указать направление реакции связи с
неподвижной осью вращения; можно только
утверждать, чтореакция этой связи
проходит через ось и расположена
в плоскости, перпендикулярной
оси.
Неизвестные вектор
![]() реакции связи определяется в
плоскости двумя составляющими
реакции связи определяется в
плоскости двумя составляющими![]() и
и![]() ,
то есть реакция связи с неподвижной
осью вращения содержит две неизвестные
величины.
,
то есть реакция связи с неподвижной
осью вращения содержит две неизвестные
величины.
4. Связь с неподвижным центром вращения (сферический шарнир)
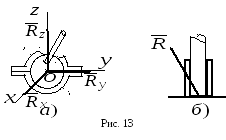 Сферическим
шарниром называется устройство,
изображенное на рис 13а, которое делает
неподвижной точку
Сферическим
шарниром называется устройство,
изображенное на рис 13а, которое делает
неподвижной точку![]() рассматриваемого тела.
рассматриваемого тела.
Предполагается,
что сферические поверхности контакта
идеально гладкие. Тогда реакция
сферического шарнира имеет направление
нормали к его поверхности. Единственное,
что известно относительно реакции –
это то, что она проходит через центр
шарнира
![]() ,
но может иметь любое направление в
пространстве, то есть определяется
тремя проекциями
,
но может иметь любое направление в
пространстве, то есть определяется
тремя проекциями![]() на три оси координат. Тремя составляющими
определяется также реакция подпятника
или радиально-упорного подшипника (рис.
13б).
на три оси координат. Тремя составляющими
определяется также реакция подпятника
или радиально-упорного подшипника (рис.
13б).
5. Опорный стержень
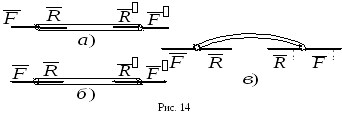 Предполагается,
что стержень невесомый, имеет на концах
шарниры, а силы приложены только к концам
стержня.
Предполагается,
что стержень невесомый, имеет на концах
шарниры, а силы приложены только к концам
стержня.
Реакция такого идеального стержня направлена вдоль оси стержня, в чем не трудно убедиться. Действительно, если силы приложены только к концам стержня, то он находится в равновесии под действием двух сил, а по аксиоме 1 это возможно, если эти силы пряморотивоположны—направлены по прямой, соединяющей концы стержня. Если реакции направлены наружу (рис. 14а) – стержень сжат, если внутрь (рис. 14б) – растянут. Так как растягивающему усилию приписывают знак плюс, то направляя реакцию вовнутрь, мы получаем величину усилия со знаком плюс.
На рис 14в изображен растянутый стержень с криволинейной осью.