

ТРАНСПОРТНО-ГРУЗОВЫЕ КОМПЛЕКСЫ. МЕХАНИЗАЦИЯ СКЛАДСКИХ РАБОТ С НАСЫПНЫМИ ГРУЗАМИ
.pdf
|
|
|
|
|
|
|
Таблица 5.15 |
|||
|
График рабочего цикла козлового (мостового) крана |
|
|
|||||||
№ |
Наименование |
Продолжи- |
|
|
Время, с |
|
|
|||
тельность |
|
|
|
|
|
|
||||
п/п |
операции |
10 |
20 |
30 |
40 |
50 |
и т.д. |
|||
операции, с |
||||||||||
|
|
|
|
|
|
|
|
|
||
1 |
Застропка груза |
|
|
|
|
|
|
|
|
|
2 |
Подъем крюка с грузом |
|
|
|
|
|
|
|
||
3 |
Передвижение крана с грузом |
|
|
|
|
|
|
|||
4 |
Передвижение |
тельфера |
с |
|
|
|
|
|
|
|
грузом |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
5 |
Опускание груза |
|
|
|
|
|
|
|
||
6 |
Отстропка груза |
|
|
|
|
|
|
|
|
|
7 |
Подъем крюка без груза |
|
|
|
|
|
|
|
||
8 |
Передвижение крана без груза |
|
|
|
|
|
|
|||
9 |
Передвижение |
тельфера |
без |
|
|
|
|
|
|
|
груза |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
||
10 |
Опускание крюка |
|
|
|
|
|
|
|
||
|
|
|
Итого время цикла: |
|
|
|
|
|
||
1 Без совмещения операций
2 С совмещением операций
3 Определить коэффициент совмещения операций, используя циклограмму, по формуле:
φс Тс  Тп ,
Тп ,
где Тс – продолжительность рабочего цикла крана с учетом совмещения операций, с; Тп – то же, без совмещения операций (при последовательном выпол-
нении операций), с.
4 Рассчитать показатели режима работы крана:
а) коэффициент использования крана по грузоподъемности:
Кг М г.см  М н ,
М н ,
где Мг.см – среднее значение массы груза, поднимаемого краном за смену, т; Мн – номинальная грузоподъемность крана, т;
б) коэффициент сменного использования крана:
200
где
где
где
где
где
где
Ксм Т м.см  Тсм ,
Тсм ,
Тм.см – продолжительность работы крана в течение смены, ч; Тсм – продолжительность рабочей смены, ч; в) коэффициент использования крана в течение суток
Ксут. Тсут.  24,
24,
Тсут – число часов работы механизма в сутки, ч; г) коэффициент использования крана в течение года
Кгод Тг  365 ,
365 ,
Тг – число дней работы механизма в году, дн; д) относительная продолжительность включения механизмов крана:
– подъема груза:
ПВ |
t рпг |
100 % , |
|
Tрц |
|||
пг |
|
||
|
|
t рпг – продолжительность работы механизма подъема в течение рабочего цикла, с;Т рц – общая продолжительность цикла, включающего время ра-
боты t р и время паузы tп (от момента начала подъема груза,
его перемещения и до возвращения крана в исходное положение, с),
Т рц t р tп ;
– передвижения крана:
ПВ |
t рпк |
100 % , |
|
Tрц |
|||
пк |
|
||
|
|
t рпк – продолжительность, работы механизма передвижения крана
течение рабочего цикла, с;
– передвижения тельфера:
ПВ |
t рпс |
100 % , |
|
Tрц |
|||
пс |
|
||
|
|
t рпс – продолжительность работы механизма передвижения тель-
фера в течение рабочего цикла, с.
5 Рассчитать техническую производительность и производственную норму выработки крана:
201

а) техническая производительность:
П3600 М г ,
тφс Тц
где Мг – количество груза, перемещаемого за один цикл, т; б) производственная норма выработки – устанавливается путем хро-
нометражных наблюдений. Для расчетов производственная норма наработки машины за смену может быть определена по формуле:
Qпр Тсм Пт Кг Кв , т/смену,
где Кв – коэффициент использования машины по времени в течение рабочей смены (Кв = Ксм).
Кг – коэффициент использования крана по грузоподъемности.
6 Построить график зависимости технической производительности крана от веса груза, перемещаемого за цикл, Пт f Мг ,
|
|
|
Пт |
|
3600 М г |
; φ Тц |
сonst . |
||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
φ Тц |
|
|
|
|
|
|
|
|
|
|
Мг |
0,5 |
1,0 |
2,0 |
|
3,0 |
|
4,0 |
5,0 |
|
6,0 |
7,0 |
8,0 |
9,0 |
10,0 |
|
Пт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7 Построить график зависимости технической производительности крана от длительности рабочего цикла, Пт f φ Тц ,
|
|
П |
|
|
|
3600 М г |
; М |
|
сonst . |
|
|
|
||
|
|
т |
|
|
г |
|
|
|
||||||
|
|
|
|
φ Тц |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
φ∑Тц |
30 |
60 |
|
|
90 |
120 |
|
150 |
|
180 |
210 |
240 |
||
Пт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
8 Определение мощности привода рабочих механизмов крана:
а) определение мощности грузоподъёмного двигателя крана в период установившегося движения:
Nп M г M пп V1 , кВт,
102 η1η2
где Мг – вес полезного груза, кг; Мпп – вес подъёмника и приспособлений, кг; V1 – скорость подъёма, м/с;
η1 – КПД лебедки, принимается равным 0,92…0,99;
202
η2 – КПД полиспаста, принимается равным 0,78…0,97. б) определение режима работы крана:
ПВ 200 h , %
к |
Tц V |
|
где h – средняя, высота подъема, м;
Тц – средняя продолжительность рабочего цикла, с. в) мощность, расходуемая на передвижение тележки:
Nт WтVт , кВт,
102 η3
где Wт – сопротивление передвижению тележки (тельфера); Vт – скорость передвижения тележки, м/с;
η3 – КПД механизма передвижения тележки (тельфера). Сопротивление передвижению тележки (тельфера) определяется по
формуле:
Wт K M г M пп M т f1d1 2 f2 , D1
где К – коэффициент, учитывающий добавочное сопротивление от трения в ребордах колес, может быть принят равным 1,6;
f1 – коэффициент трения скольжения в цапфах колёс, f1 = 0,1; f2 – коэффициент трения качения f2 = 0,5;
d1 – диаметр ходового колеса тележки (тельфера), мм; D1 – диаметр оси ходового колеса, мм;
Мт – собственный вес тележки (тельфера), кг.
г) мощность двигателя для механизма передвижения крана по подкрановым путям:
Nк WкVк , кВт;
102 η4
Wк K M г M пп M т М к f1d2 2 f2 , D2
где Wк – сопротивление передвижению крана, кг;
Vк – скорость передвижения крана, м/с; Мк – вес крана, кг;
η4 – КПД привода механизма передвижения крана; d2 – диаметр цапфы ходового колеса крана, мм;
203
д) суммарная расчётная мощность, расходуемая механизмами крана:
N р Nп Nт Nк ,
е) фактическая мощность силовых установок крана (берётся по паспорту):
Nф Nп.ф Nт.ф Nк.ф ,
ж) коэффициент запаса мощности:
К м Nф  N р .
N р .
СОДЕРЖАНИЕ ОТЧЁТА
1Привести схему козлового крана.
2На основании хронометрических наблюдений и расчетов разработать график рабочего цикла козлового крана.
3Привести расчет показателей режима работы механизмов крана.
4Привести расчёт технической производительности и производственной нормы выработки крана.
5Построить графики зависимости Пт от Mг и Тц.
6Рассчитать мощности привода рабочих механизмов крана.
Литература: [1, 2, 3, 4, 11].
РАБОТА № 10 ИССЛЕДОВАНИЕ ОРГАНИЗАЦИИ РАБОТЫ И ТЕХНИЧЕСКОЙ ПРОИЗВОДИТЕЛЬНОСТИ ЭЛЕКТРОПОГРУЗЧИКОВ ПРИ ПЕРЕГРУЗКЕ СЫПУЧИХ ГРУЗОВ В ТАРЕ ИЛИ ТАРНОШТУЧНЫХ ГРУЗОВ
Цель работы: практически ознакомиться с организацией работы погрузчиков на складе, с устройством и принципом действия погрузчика, методикой построения графика рабочего цикла и расчетом производительности.
ОБЩИЕ СВЕДЕНИЯ
Электропогрузчики (рис. 5.20 и табл. 5.15) – это передвижные самоходные машины на колёсном ходу, оборудованные грузоподъёмным устройством, все механизмы которого приводятся в действие от электродви-
204

гателя, питающегося от аккумуляторной батарей. Они предназначены для выполнения погрузочно-разгрузочных работ в железнодорожных вагонах, автофургонах, морских и речных судах, для штабелирования тарно-штуч- ных грузов в крытых складках и на открытых площадках с твердым ровным покрытием, а также для внутрицеховой транспортировки, обслуживания сборочных линий и комплектовочных складов.
Рис. 5.20. Общий вид электропогрузчика 4004: 1 – пластинчатые цепи грузоподъемника; 2 – цилиндр грузоподъемника; 3 – рама грузоподъемника; 4 – гидронасос; 5 – включающий контактор; 6 – фара; 7 – гидрораспределитель; 8 – контроллер; 9 – штурвал; 10 – аккумуляторная батарея; 11 – рама шасси; 12 – противовес;
13 – задний управляемый мост; 14 – пусковое сопротивление; 15 – электродвигатель механизма передвижения; 16 – передний
ведущий мост; 17 – гидроцилиндры наклона рамы грузоподъемника; 18 – грузовая каретка; 19 – вилы; 20 – сталкиватель
Универсальность электропогрузчиков, позволяющая полностью механизировать погрузку и выгрузку большинства массовых штучных, тарных и сыпучих грузов, обеспечивается возможностью использования сем-
205
надцати видов сменных грузозахватных приспособлений, основным из которых является вилочный захват [13].
По конструкции ходовой части различают четырех- и трехопорные электропогрузчики. Первые имеют лучшую боковую устойчивость, вторые
– большую маневренность, что облегчает их использование в стесненных условиях.
Корпус электропогрузчика является несущей конструкцией и представляет собой сварную раму 11, облицованную стальными листами. На раме жестко закреплен передний ведущий мост 16, ходовые колеса которого получают вращение от электродвигателя 15 с помощью механического дифференциала. Задний мост 13, оборудованный двумя управляемыми колесами, соединен с корпусом через полуэллиптические рессоры (рис. 5.20).
Грузоподъемный механизм с телескопической рамой 3 и кареткой 18 шарнирно прикреплен к корпусу между передними ведущими колёсами. При помощи двух шарнирных гидроцилиндров 17 рама может наклоняться вперед – при захватывании груза и назад – при транспортировании груза. Вертикально-подвижная каретка 18 оснащена закрепляемыми на ней грузозахватными приспособлениями, например вилами 19, и соединена с корпусом гидроцилиндра подъема 2 внутренней рамы грузоподъемника вту- лочно-роликовой цепью 1. Управление гидроприводом погрузчика осуществляется с помощью рукоятки гидрораспределителя, управление колесами заднего моста – с помощью рулевого колеса 9. На раме под сидением водителя расположен отсек аккумуляторной батареи 10.
Основные технико-эксплуатационные показатели наиболее распространённых моделей отечественных универсальных электропогрузчиков приведены в табл. 5.16.
ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ РАБОТЫ
1На примере действующей модели вилочного электропогрузчика практически изучить его конструкцию, принцип действия, приемы управления и технологию выполнения погрузочно-разгрузочных операций.
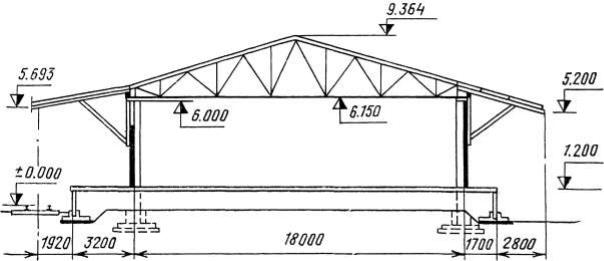
2Выполнить хронометражные наблюдения по определению продолжительности рабочего цикла электропогрузчика при работе на складе (рис. 5.21) для одного из следующих вариантов работ:
206
а) транспортировка предварительно загруженных поддонов; б) транспортировка предварительно сформированных пакетов с тар-
но-упаковочными грузами и укладка их в штабель с помощью сталкивателя;
Таблица 5.16 Техническая характеристика универсальных электропогрузчиков [15]
Показатели электропогрузчиков |
ЭП- |
ЭП- |
ЭП- |
ЭП- |
|
ЭП- |
ЭП- |
4004 |
|
0601 |
0803 |
1203 |
103 |
|
202 |
501 |
|||
|
|
|
|
||||||
Грузоподъемность, т |
0,63 |
0,8 |
1,25 |
1,0 |
|
2,0 |
5,0 |
0,75 |
|
Высота подъема груза, м |
3,0 |
3,0 |
3,0 |
2,8 |
|
2,0 |
4,5 |
4,0 |
|
Габариты, мм: |
|
|
|
|
|
|
|
|
|
– |
длина с вилами |
2126 |
2126 |
2416 |
2500 |
|
3150 |
3900 |
2400 |
– |
ширина |
915 |
915 |
988 |
960 |
|
1350 |
1550 |
911 |
– |
строительная высота |
1960 |
2040 |
2040 |
1995 |
|
1650 |
3100 |
1445 |
Внешний радиус поворота, мм |
1100 |
1170 |
1340 |
160 |
|
2040 |
2740 |
1550 |
|
Скорость передвижения, км/ч: |
|
|
|
|
|
|
|
|
|
– |
с грузом |
9,0 |
9,0 |
9,0 |
9,0 |
|
10,0 |
6,0 |
8,5 |
– |
без груза |
10,0 |
10,0 |
10,0 |
10,0 |
|
12,0 |
7,0 |
10,0 |
Скорость подъема вил, м/с: |
|
|
|
|
|
|
|
|
|
– |
с грузом |
0,20 |
0,16 |
0,16 |
0,15 |
|
0,17 |
0,10 |
0,168 |
– |
без груза |
0,24 |
0,22 |
0,22 |
0,21 |
|
0,23 |
0,16 |
0,076 |
Скорость опускания вил, м/с: |
|
|
|
|
|
|
|
|
|
– |
с грузом |
0,37 |
0,37 |
0,37 |
0,33 |
|
0,33 |
0,40 |
0,071 |
– |
без груза |
0,13 |
0,10 |
0,13 |
0,13 |
|
0,13 |
0,14 |
0,071 |
Тип ходовой части |
Трехопорная |
|
Четырехопорная |
|
|||||
Тип шин |
Массивные |
Пневматические |
Массивные |
||||||
Масса, кг |
1535 |
1725 |
2385 |
2400 |
|
3600 |
8630 |
1800 |
|
Рис. 5.21. Схема поперечного разреза грузового склада пролётом 18 м (типовой проект)
207
в) работа с одним поддоном (укладка груза в поддон, транспортировка к месту складирования, снятие с поддона и укладка в штабель). В процессе загрузки и разгрузки поддона электропогрузчик простаивает.
Варианты работ, тип поддона, вид и вес груза на поддоне задаются каждой подгруппе преподавателем.
3 Построить график и определить время рабочего цикла электропогрузчика при перегрузке тарно-штучных грузов на поддонах, используя результаты хронометражных наблюдений или исходные данные, представленные преподавателем:
–модель универсального электропогрузчика ЭП: массу груза Мг, т;
–среднюю высоту захвата Нэ и укладки Ну груза в штабель, М;
–среднюю дальность транспортировки груза L, м.
Время рабочего цикла электропогрузчика при последовательном выполнении операций определяется по формуле:
к
Тц ti , с,
i 1
где ti – продолжительность i-й операции, с; к – количество операций в цикле.
Наименование, последовательность выполнения и расчетные формулы продолжительности операций приведены в табл. 5.17 и указаны условные обозначения следующих параметров: Hтр – уровень расположения вил в транспортном положении (0,3 м);
Vп и Vп – скорость подъёма вил соответственно с грузом и без груза, м/с (см. табл. 5.16);
Vо и Vо – скорость опускания вил соответственно с грузом и без груза, м/с;
Vтр и Vтр – скорость передвижения электропогрузчиков соответст-
венно с грузом и без груза, км/ч;
tpз – время на разгон и замедление (1…1,5 с).
4 Построить циклограммы работа электропогрузчика без и с совмещением операций. Пример построения графиков рабочего цикла приведён в табл. 5.17. Определить коэффициент совмещения операций в рабочем цикле по формуле:
208
φ Т рц  Тц ,
Тц ,
где Трц – продолжительность рабочего цикла электропогрузчика с учётом совмещения операций, с; Тц – то же, при последовательном выполнении операций, с.
Таблица 5.17
Расчёт графика рабочего цикла вилочного электропогрузчика [2]
Наименование операции |
|
Продолжительность |
|
График рабочего цикла |
||||||||||||||||||||||||
|
|
|
|
|
операции, с; расчет- |
|
|
|
|
|
Время, с |
|||||||||||||||||
|
|
|
|
|
|
ная формула |
|
10 |
20 |
|
30 |
40 |
… |
|||||||||||||||
Наклон |
грузоподъемника |
вперед |
|
|
t1 2...3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
при подходе к грузу |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Подъем или опускание вил на высо- |
t2 |
|
H |
з Hтр |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
ту захвата груза |
|
|
|
|
|
|
|
|
рз |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
Vпо |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Захват поддона с грузом |
|
|
|
|
t3 2...3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Наклон грузоподъемника назад |
|
|
|
t4 2...3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Отъезд |
назад с |
поворотом |
на |
90° |
t5 |
6...8 10...15 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(180°) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Опускание или |
подъем груза в |
t6 |
|
H |
з Hтр |
|
t рз |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
транспортное положение |
|
|
|
|
|
Vоп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Транспортировка груза |
|
|
t7 |
3,6 L |
|
t рз |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
Vтр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Установка грузоподъемника в вер- |
|
|
t8 2...3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
тикальное положение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Подъем или опускание груза на вы- |
t9 |
|
H |
з Hтр |
|
t рз |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
соту штабеля |
|
|
|
|
|
|
Vпо |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Укладка груза в штабель |
|
|
|
|
t10 5...8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отъезд |
назад с |
поворотом |
на |
90° |
t11 |
6...8 10...15 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
(180°) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Наклон грузоподъемника назад |
|
|
|
t12 2...3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Опускание или подъем вил в транс- |
t13 |
|
H |
у Hтр |
|
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
портное положение |
|
|
|
|
|
|
|
рз |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
Vоп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
t |
|
|
3,6 L |
t |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Передвижение без груза |
|
|
|
|
рз |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
14 |
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
тр |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
5 Определить производительность электропогрузчика. Техническая производительность без и с совмещением операций:
П |
т |
3600 М г |
и П |
т |
3600 М г , |
|||
|
|
Тц |
|
|
φ Тц |
|
||
|
|
|
|
|
|
|||
209