

fizika
.pdf5.6. Кинетическая энергия твердого тела, вращающегося вокруг неподвижной оси... |
311 |
||||||||||||
ν′ = |
(I + I |
2 |
)2πν |
= (1+ |
I |
2 |
)ν = (1+ |
2mR2 |
)ν = (1+ |
2m |
)ν . |
|
|
1 |
|
|
|
|
(7) |
||||||||
2πI |
I |
1 |
MR2 |
M |
|||||||||
|
|
|
|
|
|
||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
||
Требование неизменности момента импульса системы тел подразумевает возможность изменения момента импульса каждого из тел системы.
Отношение кинетической энергии системы в конечный и начальный момент равно
|
|
|
|
|
|
|
I ω′2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
T |
|
|
|
|
|
1 |
|
|
|
|
|
|
ω′2 |
|
|
|
I |
|
|
|
|
ν′2 |
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
к |
= |
|
|
|
|
|
|
= |
|
|
|
|
1 |
|
|
= |
|
|
|
|
|
1 |
|
|
= |
|
|||||
|
T |
|
(I1 |
+ I2 ) |
ω |
2 |
ω2 I |
+ I |
|
|
ν2 I |
+ I |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
н |
|
I2 |
|
2 |
|
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|
|
|
1 |
|
2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
(1+ |
)2 |
ν2 |
|
|
|
|
|
I |
|
|
|
|
|
2mR |
|
|
|
|
|
|
2m |
(8) |
||||||||||
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
= |
|
|
|
I |
|
|
|
|
|
= 1+ |
2 |
= 1+ |
|
2 |
|
= 1+ |
, |
|||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
ν2 |
1+ |
I2 |
I |
1 |
|
MR2 |
|
|
M |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
I |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где ω и ω′ — начальная и конечная угловая скорость системы (платформа и человек), Тн и Тк — начальная и конечная кинетическая энергии системы. Подставляя численные значения в (7–8), получаем
|
|
|
|
ν′ |
= (1+ |
2m |
)ν = (1+ |
2 60 |
) |
1 |
= 2, 2 |
1 |
(об/с) = |
|||||||
|
|
|
|
M |
100 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
6 |
|
6 |
|
||||||
|
|
|
|
|
|
= 2,2 · 10 = 22 (об/мин) ≈ 0,37 (об/с), |
||||||||||||||
|
|
|
|
|
|
|
|
Tк |
|
= 1+ |
2m |
|
= 1+ |
|
2 60 |
= 2, 2 . |
||||
|
|
|
|
|
|
|
|
T |
M |
100 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
ν′ = (1+ |
|
2m |
)ν = 22 (об/мин) ≈ 0,37 (об/с), |
||||||||||||||||
|
M |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
Tк |
= 1+ |
2m |
|
= 2, 2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
T |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
н |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|






 А
А

5.7. Плоское движение твердого тела |
313 |
ки А, совершающей поступательное движение из начального положения в промежуточное. Отметим, что центр масс тела точка С при движении цилиндра совершает только поступательное перемещение. Из (рис. 5.7а) следует, что поступательноеG движение т. А совпадает с движением точки С. Вектор r′ — перемещение в системе отсчета К т. А из промежуточного положения в конечное. Последнее перемещение можно представить (рис. 5.7б) как вращение вокруг неподвижной оси в системе отсчета K ′ , жестко связанной с движу-
щимся центром масс системы (т. С). В этой системе отсчета вектор |
|||||||||||||||||||||||
G |
G |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
′ = R − R . Продифференцируем указанное выше векторное равен- |
||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ство для rG по времени |
|
drG |
|
|
|
drG0 |
|
|
|
drG′ |
|
|
|
|
|||||||||
|
|
|
|
|
= |
+ |
|
. |
(5.50) |
||||||||||||||
|
По определению |
|
dt |
|
dt |
|
dt |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
drG |
|
|
|
|
|
|
|
|
drG0 |
|
|||||||||
|
|
|
|
G |
|
|
|
|
G |
|
|
|
|
|
|||||||||
|
|
|
|
v |
= |
|
|
|
|
и v |
= |
|
|
|
|
|
. |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
dt |
|
|
0 |
|
|
|
|
dt |
|
|||||||
|
Так как RG0 не меняется со временем, то |
||||||||||||||||||||||
|
|
|
drG′ |
|
|
dRG |
|
|
|
dRG0 |
|
|
|
dRG |
G |
||||||||
|
|
|
|
= |
|
|
|
|
− |
|
|
|
|
= |
|
|
|
|
|
|
= vл , |
||
|
|
|
dt |
|
Gdt |
|
dtG |
Gdt |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
G |
G |
|
|
vл = [ωЦ |
, R] |
, |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где vл |
и ωЦ — линейная и угловая скорости вращательного движе- |
||||||||||||||||||||||
ния вокруг неподвижной оси, проходящей через центр масс. Таким
образом, имеем |
G |
G |
G |
|
K |
|
|||
v |
= v0 |
+ [ωЦ |
, R] . |
(5.51) |
Так как при поступательном движении все точки тела движутся
одинаково, то |
|
|
|
|
|
|
|
|
|
vGC = |
1 |
∑mi vG0i = |
1 |
(∑mi )vG0 |
= |
m |
vG0 = vG0 |
||
m |
m |
|
|||||||
|
i |
|
i |
|
|
m |
|||
и |
|
K |
G |
|
G |
G |
|
|
|
|
|
|
(5.52) |
||||||
|
|
v |
= vС + [ωЦ |
, R] . |
|||||
Таким образом, плоское движение твердого тела можно представить как сумму поступательного движения его центра масс и вращательного движения относительно неподвижной оси, проходящей через центр масс.

5.8. Кинетическая энергия при плоском движении |
|
|
|
|
315 |
|||||
∑mi rGi = m |
∑mi rGi |
= mrGСЦ |
= 0 , так как радиус-вектор центра масс в |
|||||||
i |
||||||||||
m |
||||||||||
i |
|
|
|
|
|
|
|
|
||
Ц-системе равен нулю (4.35). Таким образом, имеем |
|
|||||||||
|
|
T = T |
+ T = |
mv 2 |
+ |
IСωЦ |
2 |
|
|
|
|
|
С |
|
|
|
|
||||
|
|
|
|
. |
(5.54) |
|||||
|
|
пост |
вращ |
2 |
|
2 |
||||
|
|
|
|
|
|
|
|
|||
Следовательно, кинетическая энергия плоского движения твердого тела равна сумме кинетической энергии поступательного движения его центра масс в инерциальной системе отсчета и кинетической энергии вращательного движения относительно оси, проходящей через его центр масс, т. е. в Ц-системе.
Вопросы и задания для самопроверки
1.Дайте определение плоского движения.
2.На какие два «простых» движения можно разбить плоское движение?
3.Запишите выражение для кинетической энергии плоского движения твердого тела.
Примеры решения задач |
|
|
|
|
|
|
|
|
|
|
||||
Задача 5.12 |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
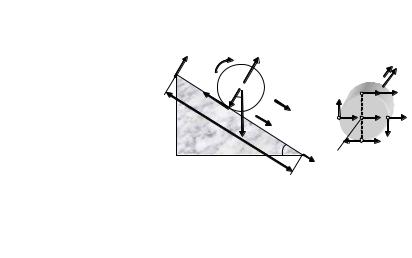
С наклонной плоско- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сти, составляющей угол α |
y |
|
N |
|
vл |
Ω R |
|
|
|
ΩG |
z |
|||
G |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
G |
||||||||
c горизонтом, без сколь- |
|
|
|
|
|
|
|
|
|
|
G |
|
||
жения скатывается ци- |
|
Fтр GС9 |
|
vG |
vGc |
G |
|
G |
|
vc |
|
vл |
||
|
R |
Α |
G |
|
|
G |
|
G |
|
|||||
линдр массой m и радиу- |
|
A |
|
|
v |
л |
v |
c |
v |
c |
v |
c |
||
|
|
a |
|
|
|
|
|
G |
||||||
сом R. Найти ускорение а |
|
X |
|
mgG |
|
|
|
|
|
|
A |
|
|
|
его центра масс. |
|
|
|
|
|
|
|
vGл |
|
vл |
||||
|
|
|
Α |
|
|
x |
|
|
vGc |
|
|
|||
Дано: α – угол накло- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
на; m — масса цилиндра; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R — радиус цилиндра. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Найти: a — ускорение центра масс. |
|
|
|
|
|
|
|
|
|
|
|
|
||
Отсутствие скольжения (нулевая скорость в точке касания А) обес- |
||||||||||||||
печивается действием сил на скатывающееся тело со стороны на- |
||||||||||||||
клонной плоскости. Эти силы сводятся к нормальной составляющей |
||||||||||||||

316 |
Глава 5. ЭЛЕМЕНТЫ МЕХАНИКИ ТВЕРДОГО ТЕЛА |
силы Gреакции опоры NG и касательной составляющей — силе трения Fтр . При отсутствии скольжения сила трения есть сила трения покоя. Движение любой точки тела при плоском движении состоит из поступательного движения вместе с центром масс тела и вращательного вокруг центра масс. Следовательно, вектор скорости точкиG А равен сумме скорости поступательного движения центра масс vC и линейной скоростиG вращательного движения точки А относительно центра масс vл ( vл = ω r ). Для простоты мы не будем обозначать индексом Ц переменные, рассчитанные относительно центра масс системы. Так как результирующая скорость в точке А равна нулю, то скорость центра масс и линейная скорость вращения в этой точке цилиндра направлены в противоположные стороны и равны по модулю. Следовательно,
vC = ω R . |
(1) |
Способ 1
Запишем выражение (5.54) для вращательного движения цилин-
дра с учетом равенств ε z |
= |
dωz |
= |
dω |
и |
M z |
= M , т. е. |
||
|
dt |
||||||||
|
|
dt |
|
|
|
|
|
||
|
|
I |
|
dω |
= M , |
|
(2) |
||
|
|
C |
dt |
|
|||||
|
|
|
|
|
|
|
|||
где IC и M – момент инерции и модуль момента внешних сил, ddtω > 0 , так как угловая скорость растет со временем. Моменты силG тяжести mgG и нормальной составляющей силы реакции опоры N равны нулю, линии действия этих сил пересекают ось вращения, проходящую через центр инерции цилиндра параллельно его образующей. Модуль момента силы трения равен
|
Mz = RFтр. |
(3) |
|||||||
Подставляя (3) в (2), получим |
|
|
|
|
|||||
IC |
dω |
|
= RFтр . |
(4) |
|||||
dt |
|||||||||
|
|
|
|
|
|
||||
Следовательно, |
|
|
|
RFтр |
|
||||
|
dω |
= |
|
|
|||||
|
|
|
|
|
. |
(5) |
|||
|
dt |
|
|||||||
|
|
|
|
IC |
|
||||

5.8. Кинетическая энергия при плоском движении |
317 |
Запишем выражение (5.53) для поступательного движения центра
масс цилиндра и спроектируем его на ось X. |
|
|||||||
maC = mg sinα – Fтр. |
(6) |
|||||||
По определению |
|
|
|
dvC |
|
|
|
|
|
a = |
. |
|
(7) |
||||
|
|
|||||||
|
|
C |
dt |
|
||||
|
|
|
|
|
||||
Подставляя в (7) скорость центра масс из (1), получаем |
|
|||||||
a = |
dvC |
|
= R |
dω |
. |
(8) |
||
|
|
|||||||
C |
|
dt |
|
|
dt |
|
||
|
|
|
|
|
||||
Учитывая (5), найдем связь между ускорением центра масс и си-
лой трения, |
|
|
|
|
|
|
|
|
Fтр |
|
|
|
a |
= R |
dω |
= R |
2 |
|
. |
|
(9) |
||||
|
|
|
|
|
|
|||||||
C |
|
|
dt |
|
|
|
IC |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|||
Выразим силу трения Fтр из уравнения (6) |
|
|||||||||||
Fтр = mg sinα – maC |
(10) |
|||||||||||
и подставим в (9) |
|
|
mg sin α − maC |
|
|
|||||||
a |
= R2 |
|
. |
(11) |
||||||||
|
|
|
|
|||||||||
C |
|
|
|
|
|
IC |
|
|
|
|
|
|
Выражая из (11) aC, получаем |
|
|
|
|
|
|
||||||
|
a |
= |
g sin α |
. |
|
|
|
|||||
|
|
|
|
|
||||||||
|
C |
|
|
|
|
|
|
|
|
|
|
|
1+ IC 2 mR
Учтем, что момент инерции цилиндра относительно оси, проходя-
щей через центр масс и параллельной направляющей цилиндра |
|
||||||||
|
|
IC = |
1 |
mR2 . |
(12) |
||||
|
|
||||||||
|
|
|
2 |
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
a = |
|
g sin α |
= |
2 |
g sin α . |
(13) |
|||
|
|
mR2 |
|
||||||
C |
1+ |
3 |
|
|
|||||
|
2mR2 |
|
|
|
|
||||
|
|
|
|
|
|
|
|||
Способ 2
Применим закон сохранения энергии. На цилиндр действует неконсервативная сила трения. Так как скорость цилиндра в точке соприкосновения с наклонной плоскостью равна нулю, то равно нулю

318 Глава 5. ЭЛЕМЕНТЫ МЕХАНИКИ ТВЕРДОГО ТЕЛА
перемещение точки приложения силы. Следовательно, работа такой силы также равна нулю. Пусть тело в данный момент прошло вдоль наклонной плоскости путь X. Будем отсчитывать потенциальную энергию от этого положения тела. Тогда в верхней точке полная энергия тела состоит только из потенциальной энергии
П = mgh = mgX sinα. |
(14) |
В нижней точке наклонной плоскости у цилиндра нет потенциальной энергии, но есть кинетическая энергия поступательного и вращательного движения относительно центра масс
|
|
|
|
|
|
|
|
|
|
|
|
|
T = |
|
mv2 |
Iω2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
+ |
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
(15) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Подставляя ω из (1) в (15), имеем |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
mv2 |
|
Iv2 |
v2 |
|
|
|
|
|
|
I |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
T = |
|
|
|
|
C |
+ |
|
C |
= |
|
|
|
C |
(m + |
|
|
|
) . |
|
|
(16) |
|||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
R2 |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2R2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Приравнивая энергии в верхней и нижней точке, получаем |
|
|||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
mgX sin α = |
v2 |
(m + |
|
I |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
C |
|
|
|
|
|
) . |
|
|
|
(17) |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
R2 |
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
Дифференцируя это равенство по времени и замечая, что |
dX |
= v |
||||||||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||||||||||
|
dvC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
C |
|
= a , вместо (17) запишем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
dt |
C |
|
|
|
dX |
|
|
|
|
|
|
2vC |
|
|
|
|
|
|
|
|
|
I |
|
|
|
dvC |
|
|
|
|||||||||||
|
|
|
|
mg |
sin α = |
|
|
(m + |
|
|
|
) |
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
(18) |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
R2 |
|
dt |
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mgv |
|
|
sin α = v (m + |
|
|
I |
)a . |
|
(19) |
|||||||||||||||||||||||||||
|
|
|
|
|
R2 |
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
C |
|
|
|
|
|||||||||||
|
Определяя из этого уравнения aC, получаем |
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
a |
= |
|
g sin α |
= |
2 |
g sin α . |
|
|
|
(20) |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
C |
|
|
1+ |
IC |
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
g sin α |
|
|
|
|
|
mR2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
Ответ: a = |
|
= |
2 |
g sin α . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
C |
1+ |
IC |
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
mR2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||

Основные положения |
319 |
ОСНОВНЫЕ ПОЛОЖЕНИЯ
• УсловияG Gравновесия твердого тела
F = ∑ Fi = 0 ,
G |
i |
G |
|
M = ∑ Mi |
= 0 . |
||
i
• УравненияG динамики твердого тела maGGC = F ,
dLdtЦ = MGЦ .
•Если силы лежат в плоскости XOY, то второе условие равновесия имеет вид
∑ Miz = ±∑ Mi = 0 ,
i |
i |
где Miz– проекция момента i-ой внешней силы на ось z, Mi = Fi l – модуль момента силы Fi, l — плечо силы.
• Момент инерции тела относительно оси
I = ∫ r2 dm ,
где r — расстояние от бесконечно малой части тела массой dm до оси.
•Момент инерции материальной точки
I = mr 2,
где r — расстояние от материальной точки с массой m до оси.
•Теорема Штейнера
I = IC + ma 2,
где I, IC — моменты инерции относительно произвольной оси и оси, проходящей через центр масс тела и параллельной первой, a – расстояние между осями,Gm – масса тела.
•Проекция момента импульсаG L твердого тела на ось z при его вращении со скоростью ω вокруг неподвижной оси (z направлена вдоль
оси)
Lz = Iωz.
•Основное уравнение вращательного движения твердого тела вокруг
неподвижной оси
Iεz = Mz,
где εz = dωz /dt – проекция углового ускорения на ось z.

320 |
Глава 5. ЭЛЕМЕНТЫ МЕХАНИКИ ТВЕРДОГО ТЕЛА |
•Закон сохранения момента импульса системы твердых тел при их вращательном движении вокруг неподвижной оси
Если Mz = 0, то Lz(t ) = Lz(t' ) или I(t )ωz(t ) = I(t' )ωz(t' ),
где t и t' – два момента времени, Mz — проекция суммарного момента внешнихG сил действующих на систему на ось z.
•Работа силы F над твердым телом при его вращательном движении
dA = Iω z dω z = M z dϕ ,
ϕ
A = ∫ M z dϕ ,
где ϕ0 – угол поворота тела, Mz – проекция момента силы на ось
•Кинетическая энергия вращения твердого тела вокруг неподвижной оси
T = Iω2 2 .
• Плоское движение твердого тела можно представить как поступа-
тельное движение его центра масс и вращательное движение отно- |
|||||||||
сительно оси, проходящей через центр масс |
|||||||||
K |
G |
|
G |
|
G |
] , |
|
||
vА = vС |
+ [ωЦ |
, rА |
|
||||||
где vK |
и vG |
|
— скорости произвольной т. А тела и его центра масс |
||||||
|
A |
|
C |
|
|
|
|
|
|
в инерциальной системе отсчета, rG — радиус-вектор т. А отно- |
|||||||||
|
|
|
|
|
|
|
|
G |
A |
сительно центра масс, ωЦ |
— угловая скорость вращения относи- |
||||||||
тельно оси, проходящей через центр масс (в Ц-системе). |
|||||||||
• Уравнения динамики твердого тела при плоском движении |
|||||||||
G |
|
G |
IС |
εЦz = M Цz . |
|
||||
ma |
= F , |
|
|||||||
C |
|
|
|
|
|
|
|
|
|
• Кинетическая энергия твердого тела при плоском движении |
|||||||||
Т = |
mv2 |
IС |
ωЦ |
2 |
|
|
|||
|
С |
+ |
|
|
|
|
. |
|
|
2 |
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
||
G |
|
|
|
|
ОБОЗНАЧЕНИЯ, ИСПОЛЬЗУЕМЫЕ В ГЛАВЕ 5 |
||||
|
|
|
– вектор углового перемещения |
||||||
ϕ |
|
|
|
||||||
ϕGz |
|
|
|
– проекция вектора углового перемещения на ось z |
|||||
ω |
|
|
|
– вектор угловой скорости |
|||||