

fizika
.pdf4.7. Абсолютно твердое тело. Равнодействующая сил... |
261 |
||
G равн |
G Gравн |
G G |
|
M |
=[r, F |
] =[r, mg] , |
(4.41) |
где mi – масса i частицы, m – масса системы частиц, rG |
— радиус-век- |
||
тор неизвестной точки приложения равнодействующей силы. С дру-
гой стороны, |
|
G |
|
G |
G |
|
|
|
G |
G |
G G |
|
G равн |
|
|
|
|
|
|
||||||
M |
= ∑M |
i |
= ∑[r , F ] = ∑[r , m g] =[(∑m r ), g] |
. |
||||||||
|
|
|
i |
i |
|
|
|
i |
i |
i i |
||
|
|
i=1 |
|
i=1 |
|
|
|
|
i=1 |
i=1 |
|
|
Радиус-вектор центра масс системы по определению (4.28) равен |
||||||||||||
|
|
|
|
rGC = |
1 |
|
∑mi rGi . |
|
|
|||
|
|
|
|
m |
|
|
||||||
|
|
|
|
|
|
i |
|
G |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Умножим и поделим выражение для M равн на m. Тогда |
|
|||||||||||
G равн |
|
|
G G |
|
|
|
1 |
|
G G G |
G |
|
|
M |
|
=[(∑mi ri ), g] |
= |
[( |
|
|
∑mi ri ), mg] =[rC |
, mg] . |
(4.42) |
|||
|
|
|
||||||||||
|
|
i=1 |
|
|
|
|
m i=1 |
|
|
|
||
Приравнивая (4.39) и (4.40), получаем |
|
|
||||||||||
|
|
|
|
[rG, mgG] =[rG , mgG |
] . |
|
|
|||||
|
|
|
|
|
|
|
|
|
C |
|
|
|
Решением этого уравнения является вектор |
|
|
||||||||||
|
|
|
|
rG = rG |
|
+ const gG . |
|
|
||||
|
|
|
|
C |
|
|
|
|
|
|
|
|
Если повернуть все силы тяжести относительно точек их приложения на один и тот же угол, то новая равнодействующая сила будет направлена в другую сторону. Можно показать, что все так полученные равнодействующиеG G силы тяжести имеют одну общую точку приложения r = rC , т. е. равнодействующая сил тяжести приложена к
центру масс системы. Точка, к которой приложена равнодействующая сил тяжести, называется центром тяжести системы. Следовательно, центр масс (инерции) и центр тяжести совпадают (совпадение — следствие приближения неизменности ускорения свободного падения в точках пространства, занятого системой частиц). Рассчи-
таем сумму моментов сил тяжести, приложенных к системе, относи- |
||||||||||
тельно ее центра масс с учетом того, что rG |
=0 (4.35). |
|
||||||||
|
|
|
|
|
mi rGiЦ |
СЦ |
|
mi rGiЦ |
|
|
G |
G |
G |
G |
|
G |
|
G |
|||
MЦ |
= ∑MiЦ |
= ∑[riЦ , mi g] = ∑[ |
|
, mg |
] =[∑ |
|
, mg] = (4.41) |
|||
m |
m |
|||||||||
|
i=1 |
i=1 |
, mgG |
i=1 |
|
i=1 |
|
|||
|
|
=[rG |
] =[0, mgG] = 0. |
|
|
|||||
|
|
СЦ |
|
|
|
|
|
|
|
|
262 |
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
Таким образом, сумма моментов сил тяжести относительно центра масс твердого тела (т. е. в Ц-системе) равна нулю. Это равенство сохраняется при любом повороте твердого тела вокруг точки центра масс. Данное утверждение справедливо и для непрерывных твердых тел.
Вопросы и задания для самопроверки
1.Дайте определение Ц-системыG отсчета. G G
2.Чему равны: радиус-вектор rC , скорость vC и ускорение aC центра масс механической системы в Ц-системе отсчета?
3.Дайте определение равнодействующей сил, приложенных к абсолютно твердому телу.
4.К какой точке абсолютно твердого тела приложена равнодействующая сил тяжести?
|
Примеры решения задач |
|
|
|
|
||||
Задача 4.6 |
|
L / 2 |
|
|
|
|
x |
|
|
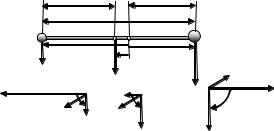
К концам гори- |
|
L |
|
|
|
|
|
||
зонтального стержня |
|
|
|
|
|
|
|
|
|
|
|
О C |
|
|
|
|
|||
длиной L = 1 м и мас- |
|
|
|
|
|
|
|||
|
G |
|
|
|
|
G |
|
|
|
сой m = 2 кг подвеше- |
|
|
|
|
|
|
|
||
m1 gG |
r1 |
G |
Gr |
|
|
r2 |
G |
|
|
ны два груза массами |
|
|
|
||||||
Gr |
|
mg |
Gr |
|
m2 gG |
M |
2Ц Gr2 |
||
m1 = 1 кг и m2 = 3 кг. |
|
|
|
|
|
||||
На каком расстоянии |
1 |
|
|
|
|
|
|
|
|
G |
|
G |
|
|
|
|
|
||
x от большей массы |
M1Ц |
G |
M Ц |
|
G |
|
|
|
|
находится центр тя- |
|
m1g |
|
|
|
|
G |
|
|
|
|
|
|
mg |
|
|
|||
жести системы? |
|
|
|
|
|
|
|
m2 g |
|
|
|
|
|
|
|
|
|
|
|
Дано: L = 1 м; m = 2 кг; m1 = 1 кг; m2 = 3 кг. Найти: x.
Выберем произвольно (например, на стержне) точку С и будем считать, что центр тяжести системы находится в этой точке. Тогда (4.41) сумма моментов сил тяжести всех частей системы относитель-
но точки С равна нулю, т. е. |
G |
G |
|
|
|
G |
G |
= 0 . |
|
||
∑ MiЦ |
= M1Ц |
+ MЦ |
+ M2Ц |
(1) |
|
i=1
4.7. Абсолютно твердое тело. Равнодействующая сил... |
263 |
Направление векторов определяем по поступательному движению правого винта, вращая его от радиус-вектора к вектору силы (4.3), а
модули — из (4.5). Следовательно, |
|
|
|
|
|
|
|||
G |
G |
|
G |
G |
G |
|
|||
М1Ц |
↑↑ M Ц и |
M1Ц |
, M Ц M2Ц . |
(2) |
|||||
Модули векторов (4.5) равны соответственно |
|
||||||||
M1Ц |
= m1 gr1 sin π / 2 = m1 g( |
L |
+ x) |
, |
|||||
|
|
||||||||
|
|
|
|
2 |
|
|
|||
M Ц |
= mgr sin π / 2 = mg( |
L |
− x) , |
(3) |
|||||
|
|||||||||
|
|
|
|
2 |
|
|
|
||
M2Ц = m2 gr2 sin π / 2 = m2 gx . |
|
||||||||
|
G |
G |
|
G |
|
|
|||
Сумма трех векторов M1Ц |
, M |
Ц и M2Ц , лежащих на одной прямой, |
|||||||
равна нулю, только если |
|
|
|
|
|
|
|
|
|
|
M1Ц + M Ц = M2Ц . |
|
(4) |
||||||
Подставляя в (4) значения модулей векторов из (3), получаем урав-
нение |
|
|
|
|
|
m g( |
L |
+ x) + mg( |
L |
− x) = m gx . |
(5) |
|
|
||||
1 |
2 |
2 |
2 |
|
|
|
|
|
|||
Раскрывая скобки и перенося выражения, содержащие неизвест-
ное в левую часть уравнения, определяем x |
|
|
|||||||||||||||||||
|
|
m g |
L |
+ m gx + mg |
L |
− mgx = m gx |
|
||||||||||||||
|
|
2 |
|
|
|||||||||||||||||
|
|
1 |
|
1 |
|
2 |
|
|
|
|
|
|
2 |
|
|||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L |
g ( m + m ) = (m − m + m) gx |
|
||||||||||||||||
|
|
|
|
|
|||||||||||||||||
|
|
2 |
|
|
1 |
|
|
2 |
|
|
1 |
|
|
|
|
||||||
и |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
m1 + m L |
|
1+ 2 1 3 1 |
|
|
|||||||||||||||||
|
|
|
|
|
|||||||||||||||||
x = |
|
|
|
|
|
= |
|
|
|
= |
|
|
= 0,375 м. |
(6) |
|||||||
m − m + m |
2 |
3 − 1+ 2 |
2 |
8 |
|||||||||||||||||
|
|
2 |
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ответ: x = |
|
m1 + m |
|
|
L |
= 0,375 м. |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
4.8. Способы определения координат центра тяжести твердого тела |
265 |
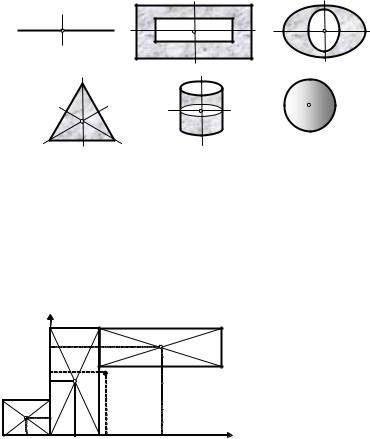
Найти координаты центра тяжести фигуры.
Дано: ABDO, OEFN, FKLM – прямоугольники; АВ = 1 м; BD = 2 м; ОE = 4 м; EF = 2 м; FK = 4 м; KL = 2 м.
Найти: xC, yC.
Определим координаты центров симметрии и площади прямоугольников, образующих фигуру ABDEFKLMN.
x1 = –1 м, y1 = 0,5 м, S1 = 2 м2, x2 = 1 м, y2 = 2 м, S2 = 8 м2, x3 = 4 м, y3 = 3 м, S3 = 8 м2,
S = S1 + S2 + S3 = 2 + 8 + 8 = 18 м2.
Получим формулы для определения координат центра тяжести произвольной фигуры, которую можно разбить на части, центры тяжести которых известны. Умножим числитель и знаменатель в пра-
вых частях выражения (4.28) на g |
|
|
|
|
|
|||||
xC = |
1 |
∑mi gxi , |
yC = |
1 |
∑mi gyi , |
zC = |
1 |
∑mi gzi . |
(1) |
|
mg |
mg |
mg |
||||||||
|
i |
|
i |
|
i |
|
||||
Так как фигура однородна, то введем плотность единицы площа-
ди фигуры σ [кг/м2]. Тогда |
|
mi = σSi , |
(2) |
m = σS , |
(3) |
где m = ∑mi – вся масса и S = ∑ Si – вся площадь фигуры. Подстав-
i |
|
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
ляя (2) и (3) в (1), получим |
|
|
|
|
|
|
|
|
∑ Si xi |
|
|
||||||||||
xC |
= |
1 |
|
∑mi gxi |
= |
1 |
|
∑σSi gxi |
= |
|
σg |
∑ Si xi |
= |
|
|
|
|||||
|
|
|
|
i |
|
(4) |
|||||||||||||||
|
mg |
|
σSg |
|
σSg |
|
S |
|
|||||||||||||
|
|
|
i |
|
|
i |
|
|
i |
|
|
|
|
||||||||
yC |
= |
1 |
|
∑mi gyi |
= |
1 |
|
∑σSi gyi |
= |
|
σg |
|
∑ Si yi |
= |
∑ Si yi |
|
|
||||
|
|
|
|
i |
|
, |
(5) |
||||||||||||||
mg |
σSg |
σSg |
|
S |
|||||||||||||||||
|
|
i |
|
i |
|
i |
|
|
|
|
|||||||||||
где ( xi , yi ) — координаты центра тяжести i части фигуры. Подставляя в (4.45) и (4.46) условия примера, получим координаты центра тяжести фигуры ABDEFKLMN:
x = |
S1 x1 + S2 x2 + S3 x3 |
= |
2(−1) + 8 1+ 8 4 |
= |
38 |
= 2 |
1 |
м, |
|
|
|
|
|||||
C |
S |
18 |
18 |
9 |
|
|||
|
|
|||||||
266 |
|
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
|||||||
|
y = |
S1 y1 + S2 y2 + S3 y3 |
= |
2 0,5 + 8 2 + 8 3 |
= |
41 |
= 2 |
5 |
м, |
|
|
|
|
|
|||||
|
C |
S |
18 |
18 |
18 |
|
|||
|
|
|
|||||||
где S1, S2, S3 – площади первой, второй и третьей части фигуры, S = = S1 + S2 + S3.
Ответ: x = |
S1 x1 + S2 x2 + S3 x3 |
= 2 |
1 |
м; |
||||
|
|
|
|
|||||
|
C |
S |
|
|
|
9 |
|
|
|
|
|
|
|
|
|||
y = |
S1 y1 + S2 y2 + S3 y3 |
= 2 |
5 |
|
м. |
|
||
|
|
|
||||||
C |
|
S |
18 |
|
|
|
|
|
|
|
|
|
|
|
|||
3. Дополнение
Этот способ является частным случаем способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести твердых тел без выреза и вырезанной части известны.
Задача 4.8 |
|
|
|
|
y |
|
|
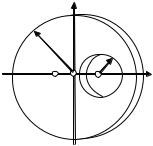
Дан круг радиуса R = 3 м с вырезан- |
|
|
|
|
ным кругом радиуса r = 1 м. Расстояние |
|
R |
|
|
между центрами кругов a = 1 м. Найти |
|
|
|
координаты центра тяжести фигуры. |
||
C |
r |
|
||
x |
Дано: R = 3 м; r = 1 м; a = 1 м. |
|||
C1 |
C2 |
Найти: xC, yC. |
||
|
||||
|
|
|
Представим несимметричную фигу- |
|
|
|
|
ру как сумму двух симметричных фи- |
|
|
|
|
гур: сплошного круга радиуса R с плот- |
|
|
|
|
ностью единицы площади σ и сплош- |
ного круга радиуса r с плотностью единицы площади — σ. Тогда в формулах (4) и (5) задачи 4.7 площадь круга радиуса r должна входить со знаком минус. В этом случае
S = πR2 |
, S |
2 |
= −πr2 |
, |
|
1 |
|
|
|
(1) |
|
S = S + S |
|
|
|
||
2 |
= π(R2 − r2 ). |
||||
1 |
|
|
|
|
|
Пусть С1 и С2 — центры (тяжести) сплошных кругов с радиусами R и r соответственно. Центр тяжести всей фигуры С лежит на прямой С1С2, так как эта линия является осью симметрии для круга с вырезом, т. е. yC = 0. Найдем xC. Поместим начало координат в центр сплошно-
Основные положения |
267 |
го круга радиусом R и направим ось x вдоль прямой С1С2. Тогда абсциссы центров тяжести большого и малого кругов
x1 = 0, (2) x2 = a
и
x = |
|
S x + S |
x |
|
|
= − |
|
πar2 |
= − |
|
ar2 |
= |
||||
|
1 1 |
2 2 |
|
|
|
|
|
|
|
|
||||||
|
S |
|
|
|
|
|
π(R2 − r2 ) |
(R2 − r2 ) |
||||||||
C |
|
|
|
|
|
|
|
|
|
|||||||
|
|
= − |
1 12 |
|
= − |
1 |
= −0,125 |
м. |
|
|||||||
|
|
|
2 |
2 |
|
8 |
|
|||||||||
|
|
|
3 |
|
|
− 1 |
|
|
|
|
|
|
|
|||
Ответ: xC = − |
|
ar2 |
|
= −0,125 м, yC = 0 м. |
|
|
||||||||||
(R2 − r2 ) |
|
|
||||||||||||||
4.Интегрирование
Вобщем случае, если твердое тело нельзя разбить на несколько конечных частей, положение центров тяжести которых известно, то можно дискретную систему заменить на непрерывную и определить координаты центра тяжести системы по формулам (4.19), заменяя в них суммирование на интегрирование.
|
|
|
|
|
LG |
ОСНОВНЫЕ ПОЛОЖЕНИЯ |
• |
Момент |
импульса pG частицы |
||||
|
|
G |
|
G G |
|
|
|
|
L = [ r, p ], |
|
|||
|
где rG |
— радиус-вектор частицы. |
||||
• |
Момент |
G |
G |
|||
M |
силы F |
|||||
|
|
G |
|
G |
G |
|
|
|
M |
= [ r, F ], |
|||
|
где rG |
— радиус-вектор точки приложения силы. |
||||
• Уравнение моментов (для частицы) |
||||||
|
|
dLG |
|
G |
|
|
|
|
|
= |
M , |
|
|
|
|
dt |
|
|||
|
|
G |
|
|
||
|
где M – сумма моментов сил, действующих на частицу. |
|||||
•Закон сохраненияG G момента импульса частицы:
если M = 0 , то L = const.

268 |
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
|||
• |
Момент L |
импульса |
pG частицы относительно оси z |
|
|
z |
|
|
|
|
Lz = L cosα, |
|
|
|
|
где α —угол между вектором LG |
и осью z. |
||
• |
Момент M z |
силы FG |
частицы относительно оси z |
|
|
M z = M cosβ, |
G |
|
|
|
где β — угол между вектором M и осью z. |
|||
• Уравнение моментов (для частицы) относительно оси
dLz = M z , dt
где M z – проекция суммы моментов сил на ось z.
• Закон сохранения проекции момента импульса частицы:
если M z = 0 , то Lz = const.
• Сумма внутренних сил и их моментов для системы частиц равна
нулю
FGвнут = 0 ,
G
M внут = 0 G.
•Момент L импульса системы частиц
LG = ∑ LGi ,
|
|
Gi |
|
|
|
где Li |
— момент импульса i частицы. |
||||
• Уравнение моментов (для системы частиц) |
|||||
|
dLG |
G |
внеш |
|
|
|
|
= M |
|
, |
|
|
|
|
|||
|
dt G |
|
|
G |
|
где L |
– момент импульса системы частиц, M внеш – сумма момен- |
||||
тов внешних сил, действующих на систему частиц.
•Закон сохраненияG моментаG импульса системы частицы:
если M внеш = 0, то L = const.
•Уравнение моментов (для системы частиц) относительно оси
dLdtz = M zвнеш ,
где Lz –проекция момента импульса системы частиц на ось z, M zвнеш – сумма проекций моментов внешних сил на ось z.

Обозначения, используемые в главе 4 |
269 |
||||||||||
• Закон сохранения проекции момента импульса системы частиц: |
|
||||||||||
если |
|
M внеш = 0 , то L |
= const. |
|
|||||||
|
|
|
z |
|
|
z |
|
|
|
||
• Радиус-вектор центра масс |
|
||||||||||
rGC = |
1 |
∑mi rGi , |
m = ∑mi |
|
|||||||
m |
|
||||||||||
|
i |
G |
|
|
i |
|
|
|
|||
где m и |
r – масса и радиус-вектор i частицы. |
|
|||||||||
|
|
i |
|
|
i |
|
|
|
|
|
|
• Скорость и ускорение центра масс |
|
||||||||||
G |
|
drGC |
G |
dvGC |
|
|
d 2 rGC |
|
|||
v = |
|
|
|
|
и a = |
|
= |
|
|
|
|
|
dt |
dt |
dt2 |
|
|||||||
C |
|
C |
|
|
|
||||||
• Ц-система — система отсчета, жестко связанная с центром масс и
перемещающаяся без вращения относительно инерциальной системы отсчета.
• УравнениеG моментов для Ц-системы
dLdtЦ = MGЦвнеш ,
•Центр тяжести — точка приложения равнодействующей сил тяжести. Совпадает с центром масс.
•Сумма моментов сил тяжести относительно центра масс равна нулю.
ОБОЗНАЧЕНИЯ, ИСПОЛЬЗУЕМЫЕ В ГЛАВЕ 4
G
pG — вектор импульса частицы
LG — вектор момента импульса частицы
FG — вектор силы
M — вектор момента силы
lG — плечо импульса или силы vG — вектор скорости
a — вектор ускорения m — масса частицы
tG — время
g — вектор ускорения силы тяжести
270 |
|
Глава 4. МОМЕНТ ИМПУЛЬСА. ЗАКОН СОХРАНЕНИЯ МОМЕНТА ИМПУЛЬСА |
||||||||
|
|
|
|
ТЕСТЫ ДЛЯ ЭЛЕКТРОННОГО ЭКЗАМЕНА |
|
|
||||
|
|
|
Момент импульса частицы. Момент силы |
|
|
|||||
G |
T4.1 Если pG — импульс, а rG — радиус-вектор частицы, то момент |
|||||||||
L |
импульса частицы равен |
G |
G |
G G |
G G |
|
||||
|
GG |
|
|
G G |
|
|
||||
1) rp |
|
2) [ p, r ] |
3) [ r, p ] |
4) m [ r, p ] |
5) –[ r, p ] |
|
||||
|
T4.2 Если pG |
— импульс, а l |
— плечо импульса, то модуль момен- |
|||||||
та LG импульса частицы равен |
|
|
|
|
|
|||||
1) l p2 |
|
2) p |
3) l 2p |
|
4) l p |
5) l 2p2 |
|
|||
|
T4.3 Если модуль импульса равен 10 м/c, а плечо импульса равно |
|||||||||
5 м, то модуль момента импульса равен |
|
|
|
|||||||
1) 500 м3/c2 |
2) 10 м/c |
3) 250 м3/c |
4) 50 м2/c |
5) 2500 м4/c2 |
||||||
|
T4.4 Если FG |
— сила, а rG |
— радиус-вектор точки приложения |
|||||||
|
|
|
|
G |
|
|
|
|
|
|
силы, то момент M силы равен |
|
G G |
G G |
|
||||||
1) |
G |
|
2) |
GG |
GG |
|
|
|||
F |
|
Fr |
3) rF |
|
4) [ F, r ] |
5) [ r, F ] |
G |
|||
|
|
|
G |
|
|
|
|
|
|
|
|
T4.5 Если F — сила, а |
l — плечо силы, то модуль момента M |
||||||||
силы равен |
2) l 2 F |
|
|
|
|
5) F |
|
|||
1) lF |
|
3) l F 2 |
|
4) l 2F2 |
|
|||||
|
T4.6 Если модуль силы равен 10 Н, а плечо силы равно 2 м, то мо- |
|||||||||
дуль момента силы равен |
|
|
|
|
|
|
||||
1) 20 Н·м |
2) 40 Н · м2 |
3) 200 Н2 · м |
4) 400 Н2 · м2 |
5) 10 Н |
|
|||||
|
|
|
G |
|
|
|
|
|
|
|
G |
T4.7 Если M – момент силы, а β – угол между осью z и вектором |
|||||||||
M , то проекция момента силы на ось z равна |
|
|
||||||||
1) M z |
= M sin β |
2) M z |
= L cosβ |
|
|
|
||||
3) M z |
= Mtgβ |
|
4) M z = Mctgβ |
5) M z = M cosβ |
|
|
||||
|
T4.8 Если F = 10 Н, l = 2 м, β = 60°, где F — сила, l — плечо силы, |
|||||||||
|
|
|
|
|
|
|
|
G |
G |
|
β — угол между осью z и вектором момента M силы |
F , то проекция |
|||||||||
момента силы на ось z равна |
|
|
|
|
|
|||||
1) 30 Н |
2) 10 Н · м |
3) 20 Н2 · м |
4) 40 Н · м2 |
5) 100 Н · м |
|
|||||
|
|
|
|
Уравнение моментов |
|
|
||||
|
|
|
G |
|
|
|
|
G |
|
|
|
T4.9 Если L – момент импульса частицы, а M – векторная сум- |
|||||||||
ма моментов сил, приложенных к частице, то уравнение моментов имеет вид