

Зубодолбежный станок модели 514
Общие сведения о станке
3убодолбежный станок модели 514 предназначен для нарезания цилиндрических зубчатых колес наружного и внутреннего зацеплений с прямыми и винтовыми зубьями в условиях индивидуального и, главным образом, серийного производства. При наличии дополнительных приспособлений на станке можно также нарезать рейки. Станок может быть использован для чернового и чистового нарезания зубьев.
Станок состоит из следующих основных узлов (рис. 28): станины 1, стойки 4, стола 2, долбежной головки 8.
Станина является основанием, которым станок крепится к фундаменту. На ней расположены: стойка, направляющие стола, гитара обката и деления (под крышкой 17), электродвигатель 16 ускоренного вращения заготовки. Стойка имеет направляющие для движения долбежнойголовки. На ней смонтированы: главный электродвигатель, коробка скоростей 6, механизм врезания и счетно-выключающееустройство 10,гитары смешанных колес (под крышками 21 и 11) и кривошипно-шатунный механизм 19 для возвратно-поступательного движения ползуна долбяка. Стол получает возвратно-поступательное движение по направляющим станины (отвод перед началом обратного и подвод перед началом рабочего хода ползуна). В столе смонтированышпиндель и червячная передача, передающая ему вращение. Шпиндель стола несет на себе изделие. Долбежная головка перемещается по направляющим стойки, передвигая ползун, штоссель и долбяк в радиальном направлении. Для управления станком предусмотрены кнопочные станции 5, 9 и рукояткой3, 7, 12, 13, 14,18, 26.
Анализ кинематической структуры зубодолбежного станка
модели 514
Кинематическая структура зубодолбежного станка состоит из pяда частных структур, при нарезании зубьев разных форм. Рассмотрим частную структуру станка для нарезания зубчатого колеса наиболее характерной формы – цилиндрического зубчатого колеса с прямыми зубьями.
Структура станка при нарезании цилиндрических зубчатых колес с прямыми зубьями
Боковая поверхность прямого зуба цилиндрического колеса очерчена по профилю эвольвентой окружности, а по длине - прямой линией.
|
|
Рис. 28. Общий вид зубодолбежного станка модели 514
|

Зуборезный долбяк состоит из ряда режущих контуров зубьев, каждый из которых имеет правую и левую режущие кромки в виде материальных линий, очерченных по эвольвенте. Размеры режущих зубьев соответствуют размерам впадин между нарезаемыми зубьями, а их геометрическое взаимное положение определяется окружным шагом нарезаемого зубчатого колеса.
Форма режущей кромки зуборезного долбяка и форма профиля зуба нарезаемого колеса различаются между собой, поэтому профили зубьев можно получить только методом обката. Образующая прямая линия по длине зуба образуется методом следа, так как долбяк при движении вдоль зуба оставляет за собой прямолинейный след. Так как станок зубодолбеж- ный, то на нем прежде всего образуется форма зуба по длине, а затем –
профиль зуба. Следовательно, образование боковой поверхности прямого зуба цилиндрического колеса на зубодолбежном станке производится методом следа и обката.
Для образования линии методом следа нужно иметь одно движение формообразования и методом обката – также одно движение. Следовательно, в станке потребуется иметь два движения формообразования.
Процесс деления в зубодол6ежном станке производится попутно в процессе формообразования, поэтому отдельного движения для него не потребуется, а для процесса врезания нужно одно движение. Таким образом, в зубодолбежном станке требуется создавать три исполнительных движения и, следовательно, основа его кинематической структуры состоит из трех частей.
При нарезании цилиндрического колеса зуборезным долбяком характер исполнительных движений определяется следующей условной записью: форма зуба по длине образуется движением формообразования ФV(П1), состоящим из одного прямолинейного движения долбяка, профиль зуба создается движением формообразования ФS(В2В3), называемым также движением обката. Это исполнительное движение – сложное, оно составлено из двух элементарных вращательных движений: вращения долбяка В2 и вращения заготовки В3. Третье исполнительное движение – движение врезания Вр(П4) – простое и состоит из одного прямолинейного перемещения долбяка в радиальном направлении.
Исполнительными звеньями станка, совершающими элементарные движения, являются: ползун (рис. 29), совершающий прямолинейное движение относительно долбежной головки; штоссель, совершающий вращательное движение относительно ползуна; шпиндель стола; долбежная головка.
Рассмотрим структуру кинематических групп, создающих установленные исполнительные движения.
|
|
Рис. 29. Кинематическая схема зубодолбежного станка модели 514 |
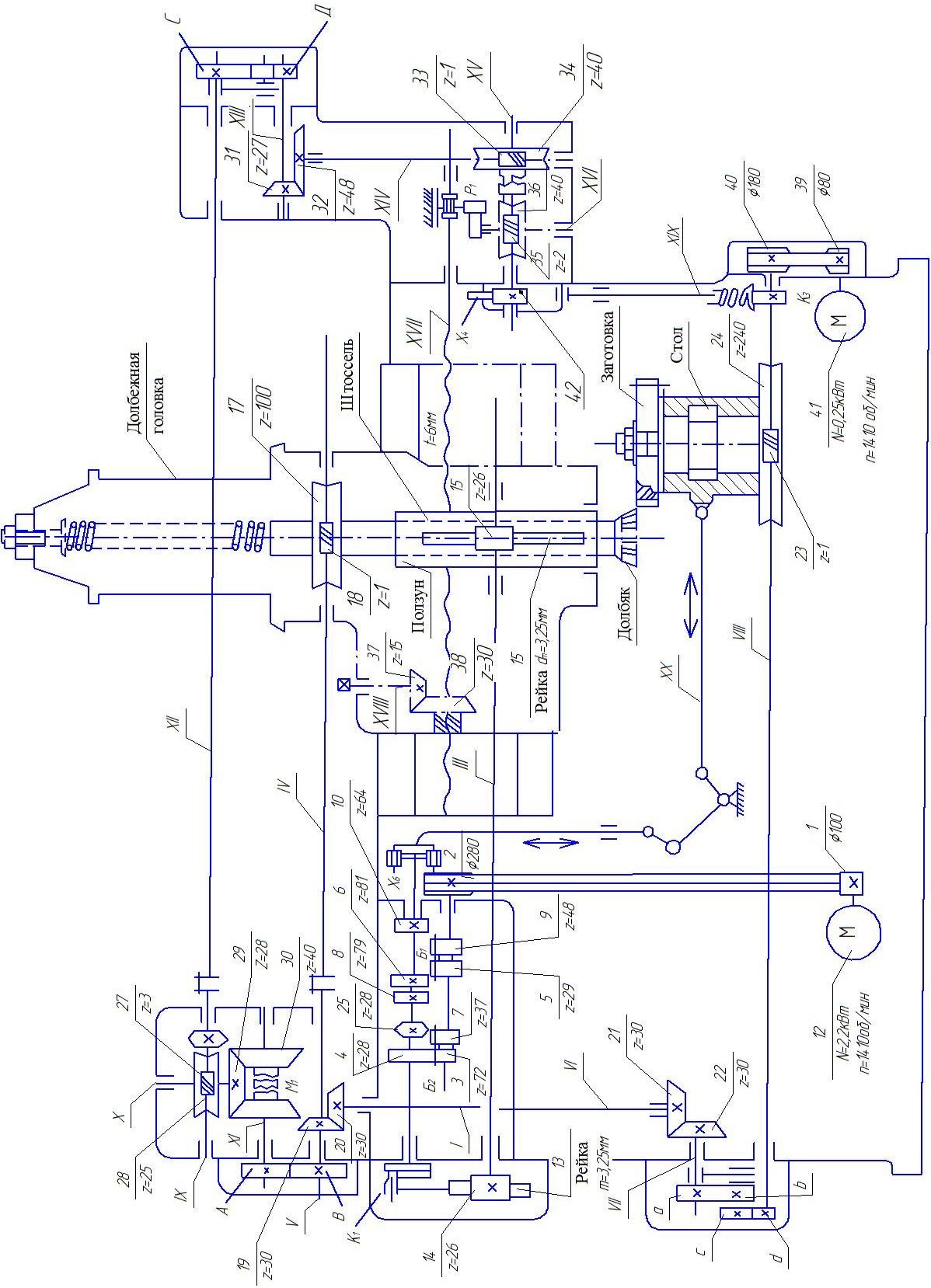
Кинематическая группа движения ФV(П1)
Внутренней связью группы является поступательная кинематическая пара между ползуном и долбежной головкой. Внешней связью является кинематическая цепь между электродвигателем 12 (см. рис. 29) и ползуном – клиноременная передача 1–2, четырехступенчатая коробка скоростей, кривошипно-шатунный механизм, реечные передачи 13–14 и 15–16.
Движение, создаваемое этой группой, простое с незамкнутой траекторией. Поэтому оно должно настраиваться по четырем параметрам. Настройка производится посредством следующих органов: на путь (длину хода) – установкой пальца К1кривошипа на разных расстояниях от центра кривошипного диска; на скорость (частоту движения) – коробкой скоро-
стей; на направление (резание сверху вниз или снизу вверх) – установкой пальца К1 кривошипа по одну или другую сторону от центра кривошипного диска; на исходное положение (место хода) – установкой длины раздвижного шатуна.
Кинематическая группа движения ФS(В2В3)
Внутренней связью группы является следующая совокупность: вращательная кинематическая пара между штосселем и ползуном, вращательная кинематическая пара между шпинделем стола и столом и кинематическая цель, связывающая вращение штосселя со шпинделем стола – червячная передача 17–18, конические зубчатые передачи 19–20, 21–22, сменные зубчатые колеса a–b и c–d гитары и червячная передача 23–24. Внешней связью является кинематическая цепь между электро-двигателем 12 и внутренней связью – ременная передача 1–2, коробка скоростей, цепная передача 25–26, червячная передача 27–28, конические зубчатые передачи 29–30 реверса и парносменные зубчатые колеса А–В.
Движение,
создаваемое этой группой – сложное с
замкнутой траекторией, поэтому оно
должно настраиваться по трем параметрам.
Настройка производится посредством
следующих органов: на траекторию –
сменными колесами a–b
и c–d
гитары;
на скорость (скорость подачи) –
парносменными колесами А–В
; на
направление – коническим реверсом с
муфтой
![]()
Кинематическая группа движений Вр(П4)
Внутренней связью группы является поступательная кинематическая пара между долбежной головкой и стойкой 4 (см. рис. 28). Внешней связью является кинематическая цепь между электродвигателем 12 (см. рис. 29) и долбежной головкой – ременная передача 1–2, коробка скоростей, цепная передача 25–26, сменные колеса C–D гитары, коническая зубчатая передача 31–32, червячные передачи 33–34, 35-36, кулачек К2 и тяга XYII.
Движение, создаваемое этой группой – простое с незамкнутой траекторией, следовательно, предполагается его настройка по четырем параметрам, однако фактически оно настраивается только по двум: на скорость (скорость врезания) – сменными колесами C–D гитары и на исходное положение (место хода) – поворотом гайки на ходовом винте XYII тяги долбежной головки. Не использованы здесь настройка на путь, так как для этого потребовалось бы иметь большой набор сменных кулачков врезания, и настройка на направление, в изменении которого нет надобности.