

5.2.Системы координат в пространстве
Система координат в пространстве – это правило, которое устанавливает взаимно однозначное соответствие между точками пространства и упорядоченными тройками чисел, которые называют координатами заданной точки.
Аффинная система координат в пространстве
Репер
< О;
 ,
, >
в пространстве задает систему координат
следующим образом. Каждая точка М
определяет вектор
>
в пространстве задает систему координат
следующим образом. Каждая точка М
определяет вектор ,
который определяет упорядоченную
тройку чисел (х,
у, z)
равенством
,
который определяет упорядоченную
тройку чисел (х,
у, z)
равенством
 +у
+у
 .
Числах,у.z
являются
координатами точки М, что может быть
подчеркнуто записью М=М(х,у.z).
Такая система координат называется
косоугольной
или аффинной
системой
координат в пространстве. Первая
координата точки в такой системе
координат называется абсциссой,
а вторая – ординатой
точки, а третья – аппликатой точки.
.
Числах,у.z
являются
координатами точки М, что может быть
подчеркнуто записью М=М(х,у.z).
Такая система координат называется
косоугольной
или аффинной
системой
координат в пространстве. Первая
координата точки в такой системе
координат называется абсциссой,
а вторая – ординатой
точки, а третья – аппликатой точки.
Ось,
задаваемую точкой О и вектором
 называютосью абсцисс;
ось, задаваемую точкой О и вектором
называютосью абсцисс;
ось, задаваемую точкой О и вектором
 ,
называютосью
ординат;.
,
называютосью
ординат;.
ось,
задаваемую точкой О и вектором
 ,
называютосью
аппликат.
,
называютосью
аппликат.
Если в репер входит правая тройка векторов, то система координат называется правой. В противном случае она называется левой.
z
y

M
z0
yuyyy

x0 x
Цилиндрическая система координат
В
пространстве задана цилиндрическая
система координат, если заданы плоскость
П с полярной осью и ось OZ,
проходящая через начало полярной оси
– полюс перпендикулярно плоскости П.
Обозначим через
 - орт (единичный вектор), задающий
положительное направление осиOZ.
- орт (единичный вектор), задающий
положительное направление осиOZ.
Цилиндрической
системой координат
каждой точке М ставится в соответствие
упорядоченная тройка чисел ρ,
φ, z
следующим
правилом. Вектор
 разлагается в сумму:
разлагается в сумму:
 +
z
+
z ,
,
где
М1 Эта сумма
определяет число z
. Числа ( ρ,
φ ) – это
полярные координаты точки М1,
0
Эта сумма
определяет число z
. Числа ( ρ,
φ ) – это
полярные координаты точки М1,
0 0
0 φ
φ .
.
Пусть
заданы цилиндрическая и правая декартова
системы координат в пространстве, причем
полярной осью служит ось абсцисс, а
полюс О совмещен с началом О декартовой
системы координат, ось OZ,
проходящая через полюс , перпендикулярна
плоскости П. Тогда между декартовыми
координатами (х,у,z)
и полярными координатами (ρ,φ,z)
точки М в пространстве существует
связь:

 ,
,
M(ρ,φ,z)



z
M1
0


Cферическая система координат
В
пространстве задана сферическая система
координат, если заданы плоскость П с
полярной осью и ось OZ,
проходящая через начало полярной оси
– полюс перпендикулярно плоскости П.
Обозначим через
 - орт (единичный вектор), задающий
положительное направление осиOZ.
- орт (единичный вектор), задающий
положительное направление осиOZ.
Сферической
системой координат
каждой точке М ставится в соответствие
упорядоченная тройка чисел следующим
правилом. Вектор
 разлагается в сумму:
разлагается в сумму:
 +
z
+
z ,
,
где
М1 Далее
сферическая система координат точке
М ставит в соответствие три числа
Далее
сферическая система координат точке
М ставит в соответствие три числа
 , где
, где - расстояние от начала полярной оси до
точки М, 0
- расстояние от начала полярной оси до
точки М, 0
 - полярный угол точки М1
, 0
- полярный угол точки М1
, 0 φ
φ
 - угол между радиус-вектором
- угол между радиус-вектором и вектором
и вектором , 0
, 0

Пусть
заданы сферическая и правая декартова
системы координат в пространстве, причем
полярной осью служит ось абсцисс, а
полюс О совмещен с началом О декартовой
системы координат, ось OZ,
проходящая через полюс , перпендикулярна
плоскости П. Тогда между декартовыми
координатами (х,у,z)
и сферическими координатами (ρ,φ, )
точки М в пространстве существует
связь:
)
точки М в пространстве существует
связь: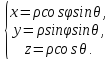
M(ρ,φ, )
)







M1