

4.1.3. Перетворення системи координат
Нехай у системі координат xOy точка М має координати (х; у).
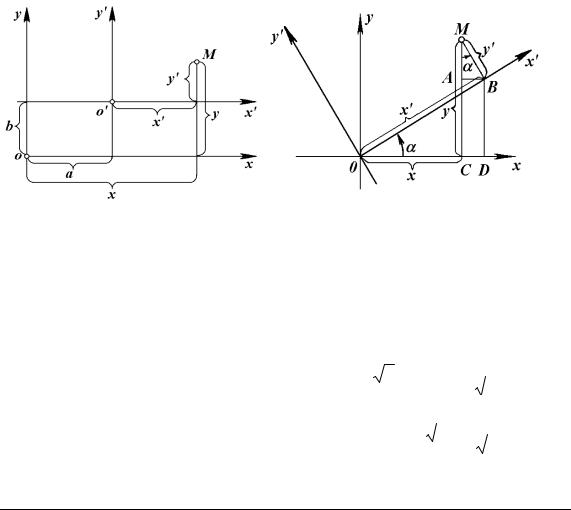
Паралельне перенесення осей
Якщо нова система координатx¢O¢y¢ одержана паралельним переносом початку старої системи в точкуO¢(a; b) (рис. 4.5), то нові координати точки М(х¢; у¢) пов’язані зі старими формулами:
ìx¢ = x - a, |
Û |
ìx = x¢ + a, |
(4.3) |
í |
í |
||
î y¢ = y - b |
|
îy = y¢ + b. |
|
Поворот осей на кут a
Якщо нова система x¢O¢y¢ одержана поворотом старої системи на кут a (рис. 4.6), то нові координати точки М(х¢; у¢) пов’язані зі старими формулами:
ì x¢ = x cosa + y sin a, |
Û |
ì x = x¢cosa - y¢sin a, |
(4.4) |
í |
í |
||
îy¢ = -x sin a + y cosa |
|
îy¢ = x¢sin a + y¢cosa. |
|
Рис. 4.5. Паралельне |
Рис. 4.6. Поворот осей на кут a |
|
перенесення осей |
Приклад 4.4. У системі координат xOy точка М має такі координати: х = 4, у = 6. Знайти її координати у системіx¢O¢y¢, що одержана поворотом старої системи на кут a = π / 6.
► З формул (4.4) дістанемо:
x¢ = x cosa + y sina = 4cos |
p |
+ 6sin |
p |
= 4 × |
3 |
+ 6 × |
1 |
= 2 |
|
|
+ 3, |
|||||||||||||
3 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
6 |
6 |
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|||||||||||
|
p |
|
p |
|
1 |
|
|
|
|
|
= 3 |
|
|
|
||||||||||
y¢ = -x sina + y cosa = -4sin |
+ 6cos |
= -4 × |
|
+ 6 × |
3 |
|
|
- 2. < |
||||||||||||||||
|
|
|
|
3 |
||||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||
6 |
|
6 |
|
|
2 |
|
|
|
2 |
|
|
|
|
|
|
|
||||||||
ДВНЗ “Українська академія банківської справи НБУ”
75