

1.5. Ускорение
Скорость материальной точки, также как и ее положение, может изменяться во времени как по величине, так и по направлению. Скорость изменения любой физической величины характеризуется производной. Скорость изменения скорости называется ускорением, которое будем обозначать буквой а. Таким образом, ускорение будет равно производной скорости по времени:
a = lim V/t = dV/dt = d2r/dt2 . (1.25)
t 0
В последнем равенстве учтено, что скорость является производной радиус-вектора, т.е. ускорение является второй производной rпо времени. Как видно, ускорение играет по отношению к скорости туже роль, что скорость по отношению к радиус-вектору.
Для проекций ускорения на оси координат можно записать:
ax=dVx/dt=d2x/dt2,ay=dVy/dt=d2y/dt2,az=dVz/dt=d2z/dt2,. (1.26)
а само ускорение и его модуль будут:
а= аxex+ аyey+ аzez,
![]() . (1.27)
. (1.27)
Ускорение можно представить и другим способом. Как отмечалось ранее, любой вектор можно представит через его единичный вектор, умноженный на модуль. Поскольку направление скорости совпадает с направлением касательной к траектории V=Vev=V. Тогда для ускорения получим:
a =dV/dt=d(V)/dt= (dV/dt) + V(d/dt) =a+an, (1.28)
где a= (dV/dt)– тангенциальное ускорение, которое направлено по касательной к траектории и по величине ранво скорости изменения модуля скорости, аan=V(d/dt) – нормальное ускорение. Как было показано ранее, производная единичного вектора – это вектор, направленный перпендикулярно (нормально) к исходному и по модулю равный скорости его вращенияd/dt.
d/dt = (d/dt) e = (d/dt) en (1.29)
Найдем теперь модуль an. Согласно (1.29) и учитывая, чтоdможно выразить через радиус окружности, касательной в данной точке к траектории и скорость:d=ds/R=Vdt/R(Рис. 1.8)
an= V d/dt = V (Vdt/R)/dt = V2/R. (1.30)
Модуль полного ускорения в этом случае запишется:
![]() (1.31)
(1.31)
Необходимо отметить, что нормальное ускорение согласно (1.30) при одинаковом модуле скорости будет тем больше, чем меньше радиус окружности касательной к траектории в данной точке. При равномерном движении по окружности нормальное ускорение будет направлено к центру окружности. Ускоренное движение по прямой будет иметь только тангенциальную составляющую.
По аналогии с перемещением и скоростью можно записать:
t2
V12=a(t)dt(1.32)
t1
1.6. Кинематика вращательного движения
Для придания общности физическим законам, связанным с вращательным движением, поворот на некоторый угол изображают в виде отрезка, направленного по правилу буравчика вдоль оси вращения и имеющего длину равную. Подобные величины носят название псевдовекторных величин (в отличие от векторов они не складываются по правилу параллелограмма).
Величина
=lim/t=d/dt(1.33)
t0
называется угловой скоростью материальной точки, направлена вдоль оси вращения, а ее направление определяется направлением вращения по
п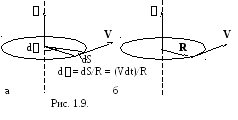 равилу
буравчика и она также является
псевдо-вектором (рис. 1.9). Модуль угловой
скорости, как следует из (1.33.) равенd/dt.
Вращение с постоянной скоростью
называется равномерным, в этом случае=d/dt=const,=t.
равилу
буравчика и она также является
псевдо-вектором (рис. 1.9). Модуль угловой
скорости, как следует из (1.33.) равенd/dt.
Вращение с постоянной скоростью
называется равномерным, в этом случае=d/dt=const,=t.
Угловая скорость показывает на какой угол совершается поворот в единицу времени. Такое движение можно характеризовать временем, за которое совершается один полный оборот – Т, называется периодом вращения и частотой – v – показывающей сколько оборотов совершается в единицу времени:
v = 1/Т,= 2/Т = 2v. (1.34)
Угловая скорость может меняться как за счет изменения скорости вращения, так и за счет изменения поворота оси вращения. Изменение угловой скорости характеризуется величиной, которую называют угловым ускорением:
= lim/t=d/dt(1.35)
t 0
Угловое ускорение тоже является псевдовектором (рис 1.9, б).
Для вращающегося тела все точки имеют одну и туже угловую скорость и угловое ускорение. Линейные же скорости и ускорения для различных точек зависят от расстояния Rданной точки до оси вращения:
V=R,a=R. (1.36)