

- •Вступ
- •1. МАШИНИ ДЛЯ ОБРОБІТКУ ҐРУНТУ
- •1.1. Завдання обробітку ґрунту
- •1.2. Агротехнічні вимоги до обробітку ґрунту
- •1.3. Способи механізованого обробітку ґрунту
- •1.4. Класифікація машин для обробітку ґрунту
- •1.5. Диференційна система засобів основного обробітку ґрунту
- •1.6. Плуги
- •1.7. Розпушувачі
- •1.8. Дискові знаряддя
- •1.9. Машини для передпосівного обробітку ґрунту та догляду за посівами
- •Запитання і завдання для самоперевірки
- •2. МАШИНИ ДЛЯ ПІДГОТОВКИ І ВНЕСЕННЯ ДОБРИВ
- •2.1. Актуальність та завдання технологічних операцій підготовки і внесення добрив
- •2.2. Види добрив та їхні технологічні властивості
- •2.3. Агротехнічні вимоги до машин для підготовки і внесення добрив
- •2.4. Способи і технології внесення добрив у ґрунт
- •2.5. Класифікація машин для підготовки і внесення добрив
- •2.6. Будова робочих органів і механізмів
- •2.7. Машини для приготування і внесення органічних добрив
- •2.8. Машини для внесення мінеральних добрив
- •2.9. Оцінювання якості роботи машин для внесення добрив
- •2.10. Елементи технічного обслуговування та підготовка до роботи машин для внесення добрив
- •2.11. Техніка безпеки під час роботи на машинах для внесення добрив
- •Запитання і завдання для самоперевірки
- •3. МАШИНИ ДЛЯ СІВБИ І САДІННЯ
- •3.1. Загальні відомості
- •3.2. Зернові сівалки
- •3.3. Сівалки для просапних культур
- •3.4. Овочеві сівалки
- •3.5. Машини для садіння
- •3.6. Тенденції розвитку машин для сівби і садіння
- •Запитання і завдання для самоперевірки
- •4. МАШИНИ ДЛЯ ЗАХИСТУ РОСЛИН
- •4.1. Актуальність, завдання та методи захисту рослин
- •4.2. Отрутохімікати, технологічні принципи їх нанесення та способи застосування, комплекси машин та їх класифікація
- •4.3. Агротехнічні вимоги до машин для захисту рослин
- •4.4. Загальна будова і процес роботи машин для захисту рослин
- •Запитання і завдання для самоперевірки
- •5. МАШИНИ ДЛЯ ЗАГОТІВЛІ КОРМІВ
- •5.1. Завдання та способи заготівлі кормів
- •5.2. Основні агротехнічні вимоги
- •5.3. Класифікація і характеристика машин для заготівлі кормів
- •5.4. Косарки, косарки-плющилки і косарки-подрібнювачі
- •5.5. Граблі, підбирачі та преси
- •5.6. Силосо- і кормозбиральні комбайни
- •Запитання і завдання для самоперевірки
- •6. МАШИНИ ДЛЯ ЗБИРАННЯ ЗЕРНОВИХ КУЛЬТУР
- •6.1. Характеристики зернових культур як об’єкта збирання, способи збирання і агротехнічні вимоги, комплекс машин
- •6.2. Зернозбиральні комбайни
- •Запитання і завдання для самоперевірки
- •7. МАШИНИ ДЛЯ ЗБИРАННЯ КУКУРУДЗИ НА ЗЕРНО ТА ПІСЛЯЗБИРАЛЬНОЇ ОБРОБКИ КАЧАНІВ
- •7.1. Способи збирання і агротехнічні вимоги до машин
- •7.2. Класифікація машин для збирання кукурудзи
- •7.3. Кукурудзозбиральні комбайни
- •7.4. Пристрої для збирання кукурудзи на зерно до зернозбиральних комбайнів
- •7.5. Качаноочисники
- •7.6. Молотарки качанів кукурудзи
- •7.7. Механізовані пункти для переробки качанів кукурудзи
- •Запитання і завдання для самоперевірки
- •8. МАШИНИ, АГРЕГАТИ, КОМПЛЕКСИ ДЛЯ ПІСЛЯЗБИРАЛЬНОЇ ОБРОБКИ ЗЕРНА І ЗБЕРІГАННЯ ВРОЖАЮ
- •8.1. Зерноочисні та сортувальні машини
- •8.2. Зерносушарки і установки активного вентилювання зерна
- •8.3. Агрегати і комплекси для післязбиральної обробки зерна
- •Запитання і завдання для самоперевірки
- •9. МАШИНИ ДЛЯ ЗБИРАННЯ КОРЕНЕБУЛЬБОПЛОДІВ
- •9.1. Актуальність і завдання збирання коренебульбоплодів
- •9.2. Агротехнічні вимоги до збиральних машин
- •9.3. Способи і технології збирання коренебульбоплодів та класифікація машин
- •9.4. Загальна будова і технологічний процес роботи машин
- •Запитання і завдання для самоперевірки
- •10. МАШИНИ ДЛЯ ЗБИРАННЯ ПРЯДИЛЬНИХ КУЛЬТУР
- •10.1. Завдання, способи збирання і типи машин
- •10.3. Машини для збирання конопель
- •Запитання і завдання для самоперевірки
- •11. МАШИНИ ДЛЯ ЗБИРАННЯ ОВОЧЕВИХ КУЛЬТУР
- •11.1. Характеристика овочевих культур як об’єкта збирання
- •11.2. Агротехнічні вимоги та типи машин
- •11.3. Машини для вибіркового збирання овочів
- •11.4. Машини для збирання капусти
- •11.5. Машини для збирання столових коренеплодів
- •11.6. Машини для збирання томатів
- •11.7. Машини для збирання огірків
- •Запитання і завдання для самоперевірки
- •12. МАШИНИ ДЛЯ ЗБИРАННЯ ПЛОДІВ ТА ДОГЛЯДУ ЗА КРОНОЮ ПЛОДОВИХ ДЕРЕВ
- •12.1. Способи збирання плодів. Агротехнічні вимоги до машин
- •12.2. Пристрої та машини для малої механізації збирання плодів
- •12.3. Плодозбиральні машини
- •12.4. Машини для транспортування і товарної обробки плодів
- •12.5. Машини для догляду за кроною плодових дерев
- •Запитання і завдання для самоперевірки
- •13. МЕЛІОРАТИВНІ МАШИНИ
- •13.1. Види меліоративних машин і агротехнічні вимоги до них
- •13.3. Основні напрями і тенденції розвитку конструкції меліоративних машин
- •13.4. Машини для культуртехнічних робіт
- •13.5. Машини для виконання земляних робіт
- •13.6. Машини для зрошення
- •Запитання і завдання для самоперевірки
- •Список рекомендованої літератури
Машини для збирання плодів та доãлядó за êроною плодових дерев
y Способи збирання
плодів. Агротехнічні вимоги до машин
y Пристрої та машини
для малої механізації збирання плодів
y Плодозбиральні машини
yМашини для транспортування і товарної обробки плодів
yМашини для догляду за кроною плодових дерев
Розділ 12
МАШИНИ ДЛЯ ЗБИРАННЯ ПЛОДІВ ТА ДОГЛЯДУ ЗА КРОНОЮ ПЛОДОВИХ ДЕРЕВ
12.1. Способи збирання плодів. Агротехнічні вимоги до машин
Збирання плодів — один із найбільш трудомі- стких процесів. На нього припадає понад 40 % усіх затрат праці. На збирання плодів з 1 га саду потрібно затратити понад 200 люд.-год, на зби- рання ягід — понад 1800 люд.-год.
Основні причини, які гальмують створення за- собів для механізованого збирання врожаю, по- лягають в особливостях фізико-механічних влас- тивостей плодів та плодових дерев, великій різ- номанітності схем садіння дерев та типів крони. Крім того, більшість плодів дуже чутливі до ме- ханічних дій, що значно ускладнює механізацію цього процесу.
У садівничих господарствах застосовують три основні способи збирання:
1)ручний з використанням засобів малої ме- ханізації;
2)напівмеханізований із застосуванням плат- форм, агрегатів тощо, які забезпечують заміну ручної праці на допоміжних операціях;
3)механізований з використанням плодозби- ральних машин, комбайнів, коли механізовані основні та допоміжні операції.
До плодозбиральних машин і пристроїв зби- рання врожаю без втрат із дотриманням якості плодів ставляться певні вимоги.
Плоди і ягоди збирають при досягненні ними стиглості для кожного сорту. Запізнення в термі- нах призводить до масового осипання плодів, по- гіршення смакових і товарних властивостей.
477
Розділ 12
Ефективність використання машин залежить від типу насаджень і конс- трукції крони. Для сортів, призначених для механізованого збирання вро- жаю, дуже важливо, щоб зв’язок плодоніжки з гілкою був менший, ніж із плодом. При збиранні врожаю кісточкових культур перевагу віддають сортам із «сухим» відривом.
Для успішної роботи машини при формуванні дерев з об’ємною кроною по- трібно залишати 3 – 4 скелетні гілки, розміщені у різних площинах. Це змен- шує кількість пошкоджень плодів, що проходять крізь крону при струшуван- ні. Кінці гілок нижнього ярусу мають бути на висоті не менше ніж 1,4 м від поверхні ґрунту, а висота штамба дерева — не менш як 0,7 м. Для прохо- дження машин у міжрядді саду влаштовують світловий коридор не менше ніж 2 м завширшки. Бажано, щоб діаметр та висота крони не перевищували
6 м.
При закладанні садів із плоскими кронами ширина крони не повинна пе- ревищувати 0,8...1,2 м, висота дерева — 3,2...3,5 м. Мінімальна висота штам- ба для таких садів 0,5 м, ширина міжрядь 4 м.
Плоди збирають у суху погоду впродовж 4...6 днів. Збирання ягід почина- ють, коли 80...85 % плодів мають знімальну стиглість.
12.2. Пристрої та машини для малої механізації збирання плодів
До засобів малої механізації збирання плодів належать ручний інвентар, драбини, підставки, плодозбиральні сумки тощо. Вони підвищують продук- тивність праці збирачів, повноту знімання плодів, сприяють зберіганню якос- ті плодів.
Для збирання плодів використовують металеві або пластмасові відра, об- тягнуті всередині мішковиною, а також спеціальні плодозбиральні сумки міст- кістю 6...10 кг. Із верхніх ярусів плоди знімають за допомогою садових драбин ЛСУ-2,5 та ЛСУ-3,5, садових підставок СП-1,2.
Основна тара для пакування плодів — ящики різної місткості і два типи контейнерів: нерозбірний дерев’яний, габаритні розміри якого 1200 × 816 × 700 мм, і складний плодовий КСП-0,5. Для механізації під час
збирання плодів у ящики використовують різні |
типи піддонів, |
найпоши- |
|||
|
реніші |
з |
яких |
мають площу |
|
|
1200 × 1000 і 1200 × 800 мм. Ван- |
||||
|
тажно-розвантажувальні роботи з |
||||
|
пакетами ящиків та контейнерами |
||||
|
виконують |
вилчастими |
агрегата- |
||
|
ми-навантажувачами ПВСВ-0,5А. |
||||
|
Для ручного збирання плодів та |
||||
|
детального обрізування крон пло- |
||||
|
дових дерев у садах із шириною |
||||
|
міжрядь 3,5...5,0 м і висотою крони |
||||
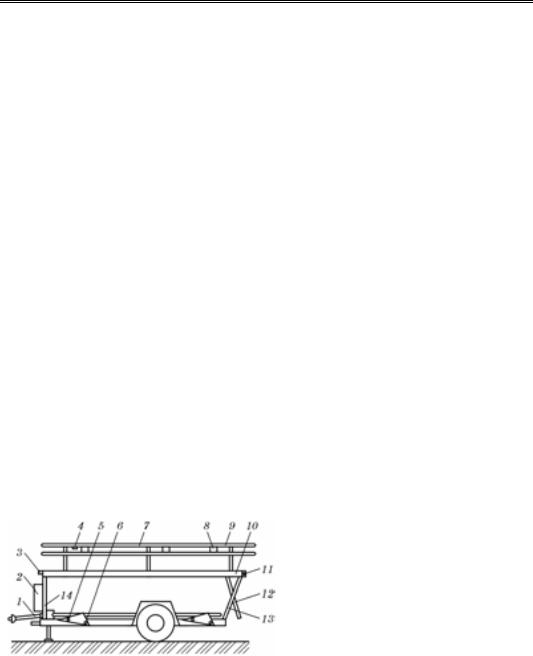
Рис. 12.1. Плодозбиральна |
до 4,5 м призначена багатомісна |
||||
платформа ПОС-0,5: |
платформа ПОС-0,5. |
платформа |
|||
1 — карданний вал; 2 — компресорна станція; |
Плодозбиральна |
||||
3 — гідравлічний розподільник; 4 — кран керу- |
ПОС-0,5 (рис. 12.1) складається із |
||||
вання; 5 — уловлювач; 6 — причіп-контейнеровіз; |
|||||
7 — перила; 8 — ящики для секаторів; 9 — пнев- |
нижньої частини причепа-контей- |
||||
матичний секатор; 10 — розсувні трапи; 11 — |
неровоза |
ПК-4 з |
уловлювачем 5, |
||
передня опора; 12 — драбина; 13 — задня опора; |
двох розсувних трапів 10 з пери- |
||||
14 — гідроциліндр |
|||||
478
Машини для збирання плодів та доãлядó за êроною плодових дерев
лами 7. Обидві частини з’єднані між собою шарнірно передньою 11 та зад- ньою 13 опорами. Для піднімання на трапи та спускання з них на машині передбачено драбину 12. Трапи розсуваються за допомогою горизонтально розміщених гідроциліндрів 14, установлених на верхній та задній опорах.
Технологічний процес роботи. Перед початком роботи трапи платформи опускають і встановлюють п’ять порожніх контейнерів, піднімають їх у край- нє верхнє положення й установлюють сім контейнерів на нижню площадку. Збирачі, розміщені на трапах, знімають плоди з верхніх ярусів дерев у плодо- збиральні сумки. Наповнені сумки перевантажують у контейнери. Плоди з нижніх ярусів крони знімають збирачі, що розміщуються на землі. Наповнені сумки перевантажують у контейнери нижньої площадки платформи. Запов- нені контейнери нижньої площадки опускають на ланцюговий конвеєр і ви- вантажують на землю. Після цього наповнені контейнери, розміщені на тра- пах, опускають у нижнє положення і так само вивантажують на землю.
Для ручного збирання плодів зерняткових культур у садах з об’ємними кронами розроблено багатомісну платформу ПКО-0,7.
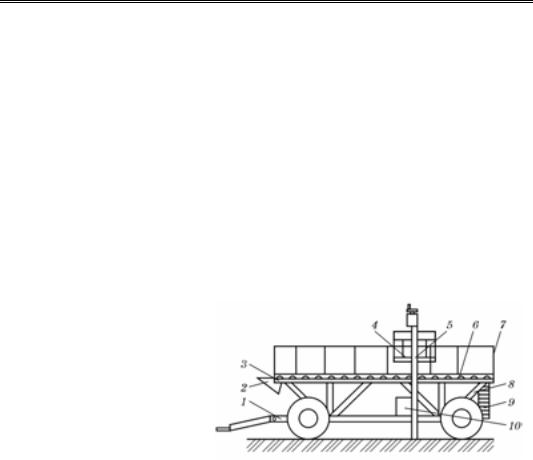
Плодозбиральну платформу ПКО-0,7 (рис. 12.2) використовують у садах із міжряддями 6...8 м, висотою крони до 6 м. Платформу створено на базі при- чепа 2ПТС-4. Вона скла- дається із шасі 1, розміще- ного на ньому настилу 2 з передньою площадкою 3.
Під настилом з бокових сто- рін платформи встановлено по чотири висувних трапи 6 з механізмами переміщення їх 10. Для знімання плодів із верхніх ярусів крони на колонах 5 є дві корзини. Збирачі піднімаються на
робочі місця драбинами 4 і |
Рис. 12.2. Плодозбиральна платформа ПКО-0,7: |
|
9. Піднімають порожні та |
||
1 — шасі причепа 2ПТС-4; 2 — настил; 3 — передня |
||
опускають наповнені кон- |
площадка; 4 — права драбина; 5 — колони; 6 — висув- |
|
тейнери на апарелі 7, яка |
ний трап; 7 — апарель; 8 — рама; 9 — ліва драбина; |
|
має раму і напрямні з роли- |
10 — механізм переміщення трапів |
|
ками. |
|
12.3. Плодозбиральні машини
Механізоване збирання плодів передбачає знімання плодів, уловлювання їх, внутрішньомашинне транспортування та затарювання.
Найпоширенішими плодозбиральними машинами є самохідні або начіпні вібраційного типу. Машини знімають плоди за допомогою струшувача, який складається з вібратора та затискача.
Зняті плоди уловлюють спеціальними пристроями — уловлювачами. Для внутрішньомашинного транспортування плодів використовують стрічкові або пластинчасті конвеєри. Затарюють плоди в ящики або контейнери. Очищу- ють плоди від домішок (листя, дрібні гілочки) відцентровими вентиляторами.
Плодозбиральна машина ВУМ-15А (рис. 12.2) призначена для збирання кісточкових (черешня, вишня, слива тощо) плодів з дерев діаметром крони до
479
Розділ 12
4 м на технічну переробку або для реалізації у свіжому вигляді. Машину мо- жна використовувати для збирання сім’ячкових і горіхоплідних культур.
Машину ВУМ-15А начіплюють на самохідне шасі Т-16М. Основними складовими частинами машини є основна 9 та пересувна 8 рами, штамбовий струшувач 3, виносний конвеєр плодів 4, начіпний уловлювач 2, що розкри- вається, та уловлювач, який намотується на барабан 5. Машина має площад- ку для тари, вентилятор, механічні передачі, гідравлічну систему та інше до- поміжне обладнання.
Рис. 12.3. Схема плодозбиральної машини ВУМ-15А:
1 — гідроциліндр для розкривання та закривання начіпного уловлювача; 2 — уловлювач; 3 — штамбовий струшувач; 4 — поздовжній конвеєр; 5 — частина уловлювача, що намотується на барабан; 6 — екран; 7 — самохідне шасі Т-16М; 8 — передня рама; 9 — задня рама; 10 — блок роликів; 11 — напрямна
Технологічний процес роботи. Перед початком роботи машина заїжджає в міжряддя і зупиняється біля дерева так, щоб штамб був напроти зони захвату струшувача. Гідроциліндром начіпний уловлювач розкривається з барабана і разом з конвеєром і струшувачем переміщується під крону дерева так, щоб штамб опинився між затискачами струшувача. Тракторист-машиніст вмикає гідроциліндр і штамб затискується затискачами струшувача. Далі за допомо- гою гідроциліндрів розкривають другий начіпний уловлювач. Отже, під дере- вом утворюється суцільна приймальна поверхня уловлювача. Потім почина- ють працювати виносний конвеєр та струшувач. Струшені плоди, що потрап- ляють на висувний та начіпний уловлювачі, скочуються на конвеєр. При пе- реміщенні плодів зі стрічки конвеєра вони очищаються від вентилятора.
Після знімання плодів із дерева тракторист-машиніст вимикає струшувач, звільняє штамб дерева, закриває начіпний уловлювач, вимикає конвеєр та переводить висувний уловлювач у транспортне положення.
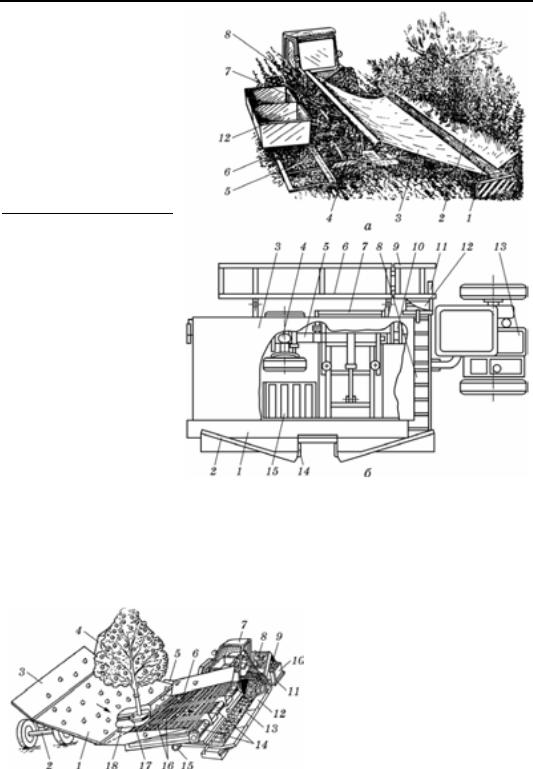
Плодозбиральна машина МПУ-1А (рис. 12.4) призначена для збирання плодів сім’ячкових та кісточкових культур і затарювання їх в ящики або кон- тейнери.
Машина МПУ-1А — це самохідний агрегат, уніфікований із шасі трактора Т-16М, від якого використані двигун, трансмісія, кабіна, передній міст. Вона складається з рами, струшувача, поздовжнього і поперечного конвеєрів, на- чіпного й розкривного уловлювачів, екрана, маніпулятора, вентилятора, площадки для контейнерів, насосної станції, гідравлічної системи та механіз- му приводу.
480
Машини для збирання плодів та доãлядó за êроною плодових дерев
Рис. 12.4. Схема плодозбира- льного комбайна МПУ-1А:
а — загальний |
вигляд; б — |
|||
вигляд зверху; 1 — поздовж- |
||||
ній конвеєр; 2 — розкривний |
||||
уловлювач; |
3 — |
начіпний |
||
уловлювач; |
4 — |
передній |
||
міст; |
5 — |
рама |
шасі; 6 — |
|
площадка |
для |
контейнерів; |
||
7 — маніпулятор; 8 — попе- |
||||
речний конвеєр; 9 — площад- |
||||
ка для розвантаження напов- |
||||
нених контейнерів; |
10 — на- |
|||
сосна |
станція; |
11 — копір; |
||
12 — вентилятор; 13 — дви- гун; 14 — затискач струшува- ча; 15 — екран
Призначення, будова і робота струшувача, по- здовжнього конвеєра і вентилятора аналогічні відповідним вузлам плодозбиральної маши- ни ВУМ-15А.
Комбайн КПУ-2 (рис. 12.5) призначений для збирання плодів сім’ячкових, кісточкових та інших культур із де- рев, що мають діаметр крони до 7 м.
Комбайн КПУ-2 скла- дається з двох агрегатів,
змонтованих на основі самохідного шасі Т-16М. Ліва секція комбайна має па- сивні уловлювачі 1 і 3 та штамбовий струшувач 17. Права секція має актив- ний уловлювач 6 та систему конвеєрів для переміщення і подавання плодів у контейнер.
Технологічний процес роботи. Обидві секції комбайна заїжджають у сусід- ні міжряддя саду і зупиняються так, щоб середина уловлювачів збіглася зі штамбом дерева. Потім переміщують струшувач до дерева та затискають за-
Рис. 12.5. Схема плодозбирального комбайна КПУ-2:
1, 3 і 6 — уловлювачі; 2 і 15 — шасі; 4 і 7 — правий і лівий агрегати; 5 і 12 — скатні поверхні; 8 — похила частина конвеєра; 9 — полотняна гірка; 10 — контейнер; 11 — майдан- чик; 13 і 14 — конвеєри; 16 — амор- тизатори; 17 — струшувач; 18 — ущільнювач
481
Розділ 12
тискачами штамб. Водночас пересувають під крону дерева уловлювачі, утво- рюючи суцільну приймальну поверхню площею близько 55 м2. Потім на лівій секції вмикають струшувач, а на правій — конвеєри. Зняті плоди падають на уловлювачі, з них на поздовжні, а потім на виносний та завантажувальні конвеєри і до затарювального пристрою.
Перед заповненням тара піднімається з площадкою пристрою в крайнє верхнє положення. В міру заповнення тари площадка повертається та опус- кається гідроциліндрами. Заповнену тару вилковими підхватами опускають на землю.
Після знімання плодів і їх затарювання струшувач та уловлювач перево- дять у транспортне положення й обидві секції переїжджають до наступного дерева.
Модернізований плодозбиральний комбайн КПУ-2А складається з двох іден- тичних агрегатів, кожний з яких має начіпний уловлювач, три поздовжні та поперечний конвеєри, вентилятор, площадки для контейнерів і ущільнювача. Додатково на лівій секції агрегату встановлений дебалансний струшувач.
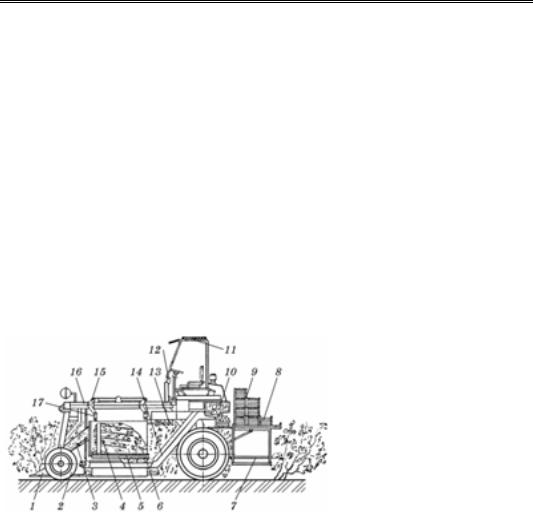
Ягодозбиральний комбайн МПЯ-1А (рис. 12.6) призначений для збирання ягід чорної і червоної смородини, аґрусу та інших ягід кущових насаджень.
Комбайн розроблено на основі висококліренсного шасі Т-6М з подовженою рамою і зміненою конструкцією переднього та заднього мостів. На шасі 16 встановлено раму 17 з розміщеними на ній двома поперечними конвеєрами 6, активатором 4, струшува-
|
|
|
чем 5. Механізмом 15 рама |
||||
|
|
|
17 піднімається на потріб- |
||||
|
|
|
ну висоту над рівнем ґрун- |
||||
|
|
|
ту. На додаткових рамках, |
||||
|
|
|
закріплених на шасі 16, |
||||
|
|
|
змонтовані два поздовжніх |
||||
|
|
|
конвеєри 14, формувач 1, |
||||
|
|
|
два |
пневмоочисники |
10, |
||
|
|
|
площадки для тари 8, дві |
||||
|
|
|
площадки |
для |
сортуваль- |
||
|
|
|
ників. Активатор приво- |
||||
|
|
|
диться в рух від ВВП шасі. |
||||
Рис. 12.6. Схема ягодозбирального комбайна МПЯ-1А: |
Технологічний процес |
||||||
ватор; 5 — струшувач ягід; 6 — поперечний конвеєр; 7 і |
роботи. |
|
Тракторист- |
||||
1 — формувач; 2 — гідросистема; 3 — подільник; 4 — акти- |
машиніст |
спрямовує |
ком- |
||||
8 — площадки для розвантаження; 9 — ящики; 10 — пнев- |
|||||||
моочисник; 11 — тент; 12 — щит з органами керування та |
байн по осьовій лінії кущів. |
||||||
контрольно-вимірювальними |
приладами; |
13 — |
При цьому формувач під- |
||||
центральний привід; 14 — поздовжній конвеєр; 15 — під- |
німає |
низько |
розміщені |
||||
німальний механізм; 16 — шасі; 17 — рама |
|
||||||
|
|
|
гілки, а подільник поділяє |
||||
кущ на дві частини, нахиляючи кожну з них по обидва боки. Гілки потрап- ляють у зону коливальної дії двох рядів вил активатора. Під гілками знахо- дяться поперечні конвеєри.
Відокремлені ягоди потрапляють на ці конвеєри, з яких вони спрямову- ються на поздовжні конвеєри. Під час зсипання потоку ягід з конвеєрів вони очищуються від домішок потоком повітря від вентиляторів. Заповнені ящики працівники встановлюють на розвантажувальну площадку.
Висоту розміщення активатора і поперечних конвеєрів змінюють підніма- льним механізмом 15, який вмикається від гідророзподільника. Частота ко-
482