

Краткий курс общей физики
..pdfОтсюда вытекают следствия:
n
1) если Fjвнеш = 0, то vC const ;
j 1 n
2) если Fx j внеш = 0, то |
vC x const ; если при этом проекция |
j 1 |
|
начальной скорости центра масс vC x0 = 0, то и xC const .
1.2.3. Динамика вращательного движения
Динамические характеристики вращательного движения
В случае плоской системы сил
моментом MO силы F относитель-
но точки O называют скалярную (алгебраическую) величину, численно равную произведению силы F на плечо d (рис. 1.14):
MO Fd, |
(1.57) |
O r A
d
 F
F
Рис. 1.14
где d – плечо силы (расстояние от точки O до линии действия си-
лы), d = r sin . Момент считается положительным, если сила стремится повернуть тело против часовой стрелки, и отрицательным в противоположном случае. Единицей измерения момента силы яв-
ляется ньютон на метр, [M] = Н м.
В случае пространственной системы сил момент силы F от-
носительно точки O есть вектор MO , равный векторному произведению радиуса-вектора r , проведенного из точки O в точку прило-
жения силы, на вектор силы (рис. 1.15): |
|
MO (F) r F. |
(1.58) |
Модуль момента силы |
|
MO (F) r F | sin | Fd, (r , F). |
|
|
|
Момент силы F относительно оси |
|
z есть скалярная (алгебраическая) вели- |
|
чина Mz, равная алгебраическому мо- |
|
менту вектора силы Fxy в плоскости, |
|
перпендикулярной оси z, относительно |
Рис. 1.15 |
точки О пересечения оси z и плоскости xy (его можно рассматривать как проекцию вектора MO на ось z) (см. рис. 1.15):
31

M z (F) Fxy dxy , |
(1.59) |
где dxy – расстояние от оси до линии действия силы Fxy |
(плечо про- |
екции силы).
Аналогичным образом вводятся моменты импульса матери-
альной точки: |
|
|
|
|
|
|
|
|
|
– относительно точки О: |
|
|
|
|
|
|
|||
|
|
L ( p) r p; |
(1.60) |
||||||
|
|
|
O |
|
|
|
|
|
|
– относительно оси: |
|
|
|
|
|
|
|
|
|
L ( p) p |
xy |
d |
xy |
mv |
xy |
d |
xy |
, [L] = кг м2/с. |
(1.61) |
z |
|
|
|
|
|
||||
Направление моментов определяется по правилу правого винта (буравчика): поворот по кратчайшему расстоянию от направления
r к направлению F (или p ) вызывает поступательное перемеще-
ние винта в направлении вектора M (или L ).
Момент инерции материальной точки относительно оси z есть скалярная величина Iz, численно равная произведению массы мате-
риальной точки на квадрат расстояния от точки до оси: |
|
Iz = m r2, [I] = кг м2. |
(1.62) |
Пример. Точка массой m = 1 кг движется параллельно оси x со скоростью v = 1 м/с, на нее действует сила F = 2 Н, параллельная оси z (рис. 1.16).
4 |
|
z, |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
||
|
|
|
F |
||||
|
|
|
|||||
|
|
v |
|
m |
|||
|
|
|
|||||
0 |
|
3 |
|
||||
|
|
м |
|||||
2 |
|
|
|
|
|
y, |
|
|
|
|
|
|
|
|
|
x, м |
|
|
|
|
|
|
|
Определим динамические характеристики вращательного движения этой материальнойточкиотносительно осейкоординат:
Lx = 0; Ly = 4 кг м2/с; Lz = –3 кг м2/с; Mx = 6 Н м; My = –4 Н м; Mz = 0;
Ix = 25 кг м2; Iy = 20 кг м2; Iz = 13 кг м2.
Момент инерции – величина аддитивная, поэтомумоментинерциителаотносительноосиz находитсякаксумма моментовинерцииматериальныхточек, изкоторыхсостоиттело:
n
Iz Izi i 1
n |
|
|
mi ri |
2 . |
(1.63) |
i 1
Для тел, обладающих элементами симметрии, моменты инерции Iz C относительно оси, проходящей через центр масс, приведе-
32
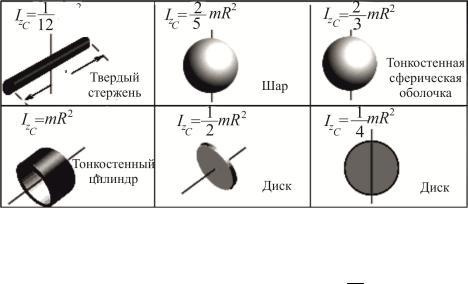
ны на рис. 1.17; моменты инерции относительно других осей можно найти по теореме Штейнера.
Теорема Штейнера
Момент инерции тела относительно произвольной оси z равен сумме момента инерции относительно параллельной ей оси zC, проходящей через центр масс, и произведения массы тела на квадрат расстояния между осями:
I |
z |
I |
md 2 . |
(1.64) |
|
|
z C |
|
mℓ2
ℓ
Рис. 1.17
Пример. Момент инерции стержня массой m и длиной ℓ относительно оси, проходящей через центр масс, Iz C 121 m 2 .
Момент инерции стержня относительно оси, проходящей через точку A на конце стержня, можно найти по теореме Штейнера:
Iz A Iz C md |
2 |
|
1 |
|
2 |
|
2 |
|
1 |
2 |
|
||
|
|
|
|
m |
|
m |
|
|
|
|
m |
. |
|
|
12 |
|
2 |
3 |
|||||||||
|
|
|
|
|
|
|
|
|
|
||||
Закон изменения момента импульса материальной точки
Производная по времени момента импульса материальной точки относительно точки или оси равна моменту силы относительно этой же точки или оси:
dL |
|
dL |
|
|
|
O |
MO , |
z |
M z . |
(1.65) |
|
dt |
dt |
||||
|
|
|
33

Отсюда вытекают следствия (законы сохранения момента импульса материальной точки):
1)если MO = 0, то LO const;
2)если M z = 0, то Lz const.
Закон изменения момента импульса системы относительно точки и оси (уравнения моментов)
z |
Момент импульса тела и сис- |
|
темы находится как сумма моментов |
импульсов материальных точек, из
|
|
|
|
|
|
|
которыхсостоиттелоилисистема: |
||||
O |
|
|
ri |
|
|
|
LO LOi ; |
Lz Lzi . |
(1.66) |
||
|
|
|
|
|
|||||||
|
|
|
v |
|
i |
i |
|
||||
|
|
|
|
mi |
|
i |
Для твердого тела, вращающе- |
||||
|
|
|
|
||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
гося |
вокруг |
неподвижной |
оси |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
(рис. 1.18), с |
учетом того, что |
|||
Рис. 1.18 |
|||||||||||
|
|
vi ri , момент импульса тела от- |
|||||||||
|
|
|
|
|
|
|
|||||
носительно оси равен произведению момента инерции тела относительно этой же оси на его угловую скорость:
Lz Lzi mi vi ri mi ri |
2 Iz . |
(1.67) |
||
i |
i |
i |
|
|
Производная по времени момента импульса системы относительно точки или оси равна сумме моментов всех внешних сил относительно этой же точки или оси:
dLO M внеш, dt i Oi
dLz M внеш. dt i zi
Отсюда вытекают следствия:
1) если MOiвнеш = 0, то LO const;
i
2) если M ziвнеш = 0, то Lz const.
i
(1.68)
(1.69)
(1.70)
(1.71)
Соотношения (1.70) и (1.71) выражают законы сохранения момента импульса системы относительно точки и оси соответственно.
34

Основной закон динамики вращательного движения
Из соотношений (1.69) и (1.67) получим:
dLz Iz |
d |
Iz M ziвнеш. |
dt |
dt |
i |
Произведение момента инерции тела относительно некоторой оси на его угловое ускорение равно сумме моментов всех внешних сил относительно этой же оси:
Iz M ziвнеш. |
(1.72) |
i |
|
Следствие из этого закона (условие равномерного вращения):
если M ziвнеш = 0, то = 0 и = const. |
(1.73) |
||||||||||
i |
|
|
|
|
|
|
|
||||
1.2.4. Работа, мощность, энергия |
|
|
|||||||||
Элементарной работой dA силы F |
|
|
|
|
|
|
|
||||
|
|
F |
v dr |
||||||||
на перемещении dr называется скаляр- |
|
|
|||||||||
ная (алгебраическая) величина, численно |
|
|
|
|
|
|
dt |
||||
|
|
|
|
|
|
||||||
равная скалярному произведению векто- |
|
|
Рис. 1.19 |
||||||||
ровсилыиперемещения(рис. 1.19): |
|
|
|||||||||
|
|
|
|
|
|
|
|||||
dA F dr F |
|
dr |
|
cos F ds cos F ds. |
(1.74) |
||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
В декартовой ортогональной системе координат: |
|
|
|||||||||
dA F dr F dx F dy F dz. |
(1.75) |
||||||||||
|
|
|
|
x |
y |
z |
|
|
|||
Единица измерения работы – джоуль, [A] = Дж.
При вращательном |
движении |
(рис. 1.20) |
|
dA M zd . |
(1.76) |
На конечном перемещении из по-
|
z |
|
|
M |
|
O |
R |
F |
|
d |
|
ложения 1 в положение 2 работа |
|
|
|
|
||||
|
|
|
|
|||||
A 2 dA 2 |
F dr |
s |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
||||
2 |
F ds. (1.77) |
Рис. 1.20 |
||||||
1 |
1 |
|
s1 |
|
|
|
|
|
Геометрический смысл этого интеграла – площадь криволинейной трапеции (рис. 1.21).
35

|
F |
dA |
|
|
|
|
|
При вращательном движении |
|
||||||||||
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
A 2 |
M zd . |
(1.78) |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
1 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Мощность N некоторой силы – работа, |
||||||||
|
|
|
|
|
|
|
|
|
|
совершаемая этой силой в единицу времени: |
|||||||||
|
|
s1 |
ds |
s2 |
|
||||||||||||||
|
|
|
|
Рис. 1.21 |
|
|
|
|
|
|
|
|
N dA . |
(1.79) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
Единица мощности – ватт, [N] = Вт. |
|
|
|
||||||||||||||
|
|
|
При поступательном движении |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dr |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N F |
|
|
F v Fv cos F v. |
(1.80) |
|||||
|
|
|
|
|
|
|
|
|
|
dt |
|||||||||
|
|
При вращательном движении |
d |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
N M |
M |
. |
(1.81) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z dt |
z |
|
|
|
Примеры:
1. Работа силы тяжести при перемещении тела массой m в поле силы тяжести планеты массой mпл из точки 1 в точку 2:
а) на космических расстояниях (рис. 1.22, а)
A G m mпл G m mпл ; |
(1.82) |
||
12 |
r2 |
r1 |
|
|
|
||
|
а)a) |
|
mпл |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
R |
|
|
|
|
r2 |
|
|
|
r1 |
m |
2 |
|
r |
1 |
|
||
|
|
|
|
|
|
|
|
y |
|
|
б)б) |
y1 |
1 |
|
|
h |
|
||
|
|
y2 |
2 |
|
|
|
mg |
||
|
|
0 |
|
|
|
|
Рис. 1.22 |
|
|
б) вблизи поверхности пла-
неты (рис. 1.22, б):
A12 mgy1 mgy2 mgh. (1.82а)
2. Работа силы упругости при изменении деформации пружины от x1 до x2
A |
|
k x2 |
|
k x2 |
(1.83) |
|
|
1 |
2 . |
||||
12 |
|
2 |
|
|
2 |
|
|
|
|
|
|
||
3. Работа |
|
|
силы |
трения |
||
скольжения |
|
|
|
|
||
|
Aтр Fтрs. |
(1.84) |
||||
36
Потенциальными (консервативными) называются силы, работа которых зависит только от начального и конечного положения перемещающегося в пространстве тела и не зависит от формы траектории. При замкнутой траектории работа потенциальной силы всегда равна нулю. Примерами потенциальных сил являются силы тяжести и упругости.
Силы, работа которых зависит от формы траектории, называются непотенциальными. Примерами непотенциальных сил являются силы трения и сопротивления.
Система тел называется консервативной, если внутренние
ивнешние силы, действующие на тела системы, являются потенциальными, иначе система называется неконсервативной (диссипа-
тивной).
Энергия – единая мера различных форм движения материи
имера перехода движения материи из одних форм в другие.
Для характеристики различных форм движения материи вводятся соответствующие виды энергии, например: механическая, внутренняя, энергия электростатических, внутриядерных взаимодействий и др.
Энергия подчиняется закону сохранения, который является одним из важнейших законов природы.
Механическая энергия W – сумма кинетической Wк и потенциальной Wп:
W = Wк + Wп. |
(1.85) |
Кинетическая энергия Wк материальной точки или тела является мерой механического движения, зависящей от скоростей их движения в данной инерциальной системе отсчета,
W |
mv2 |
. |
(1.86) |
|
|||
к |
2 |
|
|
|
|
|
Кинетическая энергия системы – сумма кинетических энергий тел системы:
Wк Wкi . |
(1.87) |
i |
|
Кинетическая энергия вращающегося тела
Wк mi vi |
2 |
|
mi 2ri |
2 |
|
2 |
mi ri |
2 |
Iz 2 |
. |
(1.88) |
|
|
2 |
|
2 |
2 |
||||||||
i |
2 |
|
i |
|
|
i |
|
|
|
|||
37
Изменение кинетической энергии системы при переходе ее из одного состояния в другое равно работе всех сил, действующих на систему:
A |
W кон W нач. |
(1.89) |
|
всехсил |
к |
к |
|
Потенциальной энергией Wп называется часть механической энергии, зависящая от конфигурации системы, т.е. от взаимного расположения ее частей и их положения во внешнем силовом поле.
Потенциальная энергия зависит от относительного расположения взаимодействующих материальных точек и относится ко всей совокупности взаимодействующих объектов. Поэтому ее называют взаимной потенциальной энергией. Говоря о потенциальной энергии одной точки, всегда имеют в виду и другие, с которыми она взаимодействует.
Потенциальная энергия определяется с точностью до константы, поскольку физический смысл имеет не сама потенциальная энергия, а ее изменение при переходе из одного состояния в другое.
Мерой изменения потенциальной энергии системы при ее переходе из одного состояния в другое является работа потенциальных сил, осуществляющих взаимодействие между элементами сис-
темы. При этом работа потенциальных сил равна убыли потенциальной энергии:
A |
W нач W кон. |
(1.90) |
|
п.сил |
п |
п |
|
Учитывая соотношения (1.82) и (1.82а) для работы потенциальных сил, напишем выражения для потенциальной энергии в поле соответствующих сил:
1. Потенциальная энергия:
а) взаимодействия тел массами m1 и m2, находящихся на расстоянии r друг от друга (см. рис. 1.22, а),
W G m1 m2 ; |
(1.91) |
п r
б) тела массой m в поле силы тяжести, находящегося в точке с координатой y вблизи поверхности планеты (см. рис. 1.22, б),
Wп = mgy. |
(1.92) |
2. Потенциальная энергия упруго сжатой или растянутой пружины (см. рис. 1.11)
38
W |
k x2 |
. |
(1.93) |
|
|||
п |
2 |
|
|
|
|
|
Работу всех сил можно представить как сумму работ потенциальных сил и сил трения (сопротивления): Aвсехсил Aп.сил Aтр.
С учетом (1.89), (1.90):
Wккон Wкнач Wпнач Wпкон Aтр,
или
(Wккон Wпкон) (Wкнач Wпнач) Aтр.
Приходим к закону изменения механической энергии: изменение механической энергии равно работе сил трения (сопротивления),
W кон W нач A |
F s 0. |
(1.94) |
тр |
тр |
|
Если система консервативна (нет сил трения), то Aтр = 0. Закон сохранения механической энергии: меха-
ническая энергия консервативной системы сохраняется постоянной в процессе движения системы,
Wк Wп const. |
(1.95) |
Если система неконсервативна, то в ней происходит диссипация (рассеивание) механической энергии, переход ее в другие виды.
В динамике поступательного и вращательного движений существуют следующие аналогии:
Поступательное движение |
Вращательное движение |
||||||
|
|
Физические |
величины |
|
|
|
|
Масса |
|
m, кг |
Момент инерции |
Iz, кг м2 |
|||
Сила |
|
F , Fx, Н |
Момент силы |
|
|
MO , Mz, Н м |
|
Импульс |
|
p , px, кг м/с |
Момент импульса |
L , L , кг м2/с |
|||
|
|
|
|
|
|
O |
z |
|
|
Законы изменения для системы |
|
|
|
||
dp |
Fiвнеш |
dLO |
|
MOiвнеш |
|
||
dt |
i |
dt |
|
i |
|
|
|
dpx |
|
внеш |
dL |
|
M ziвнеш |
|
|
dt |
Fix |
z |
|
||||
|
i |
dt |
|
i |
|
|
|
39

Поступательное движение |
Вращательное движение |
||||
|
Основное уравнение для тела |
|
|
|
|
m aC x Fixвнеш |
Iz M ziвнеш |
||||
|
i |
|
i |
||
|
Работа |
, Дж |
|
|
|
A F s |
A M z |
||||
|
Мощность, Вт |
|
|
|
|
N = F v |
N M z |
||||
|
Кинетическая |
энергия, Дж |
|
|
|
W mv2 |
W |
Iz 2 |
|
||
|
|||||
к |
2 |
к |
2 |
|
|
|
|
|
|||
Примеры решения задач
№ 1. На каком расстоянии от поверхности Земли сила гравитационного притяжения, действующая на тело, в два раза меньше, чем у поверхности Земли? Радиус Земли 6,4 Мм.
Р е ш е н и е. По закону всемирного тяготения F G Mr2m , где M и m – массы Зем-
ли и тела; r – расстояние от центра Земли до тела, r R H; R – радиус Земли; Н –
|
|
|
|
высота тела над поверхностью. Сила при- |
|||||||||
тяжения у поверхности F |
GMm , на высоте |
F |
|
GMm . |
|
|
|||||||
|
|
|
|
пов |
R2 |
|
выс |
|
r2 |
|
|
|
|
|
По |
условию |
F |
2, |
следовательно, |
F |
|
GMm |
|
r2 |
|
||
|
пов |
|
пов |
|
R2 |
|
|||||||
|
F |
F |
GMm |
||||||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
выс |
|
|
|
выс |
|
|
|
|
|
|
|
(R H )2 |
|
|
|
|
|
|
|
|
|
|
|
|
R2 |
2. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отсюда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(R H )2 2R2 R H 2 R |
|
|
|
|
|||||||
|
|
H R ( |
2 1) 6, 4 ( 2 1) 2,65 Мм. |
|
|
|
|||||||
№ 2. Какую скорость должен иметь искусственный спутник, чтобы обращаться по круговой орбите на высоте 600 км над поверхностью Земли? Радиус Земли 6400 км.
40