

Управление DMA |
255 |
9.2.3. DMA_HandleTypeDef в HAL для L0/L4
Так как микроконтроллеры STM32L0/L4 принимают другую терминологию для указания пары поток/канал (они принимают терминологию канал/запрос), DMA_HandleTypeDef отражает эту разницу в своих HAL. Тем не менее, мы не будем повторять здесь полный рассказ. Нужно иметь в виду только три момента:
•Поле DMA_HandleTypeDef.Instance – это номер канала, и он может принимать зна-
чения DMA1_Channel1..DMA1_Channel7;
•Поле DMA_HandleTypeDef.Init.Request является линией запроса, и оно может при-
нимать значения DMA_REQUEST_0..DMA_REQUEST_11;
•эта реализация DMA не поддерживает режим FIFO и режим пакетной передачи.
9.2.4. Как выполнять передачи в режиме опроса
После того, как мы сконфигурировали канал/поток DMA, нам нужно сделать несколько других манипуляций:
•сконфигурировать адреса памяти и периферийного порта;
•указать объем данных, которые мы собираемся передать;
•подготовить контроллер DMA;
•включить режим DMA в соответствующем периферийном устройстве.
HAL абстрагирует первые три пункта, используя
HAL_StatusTypeDef HAL_DMA_Start(DMA_HandleTypeDef *hdma, uint32_t SrcAddress, uint32_t DstAddress, uint32_t DataLength);
в то время как четвертый пункт зависит от периферии, и мы должны обратиться к техническому описанию именно нашего микроконтроллера. Однако, как мы увидим позже, HAL также абстрагирует этот пункт (например, если мы используем соответствующую функцию HAL_UART_Transmit_DMA() при конфигурации UART в режим DMA).
Теперь у нас есть все элементы для того, чтобы увидеть полностью работающее приложение. В следующем примере мы просто отправим строку через периферийное устройство UART2 в режиме DMA. Соответствующие шаги:
•UART2 конфигурируется с использованием модуля HAL_UART, как мы видели в предыдущей главе.
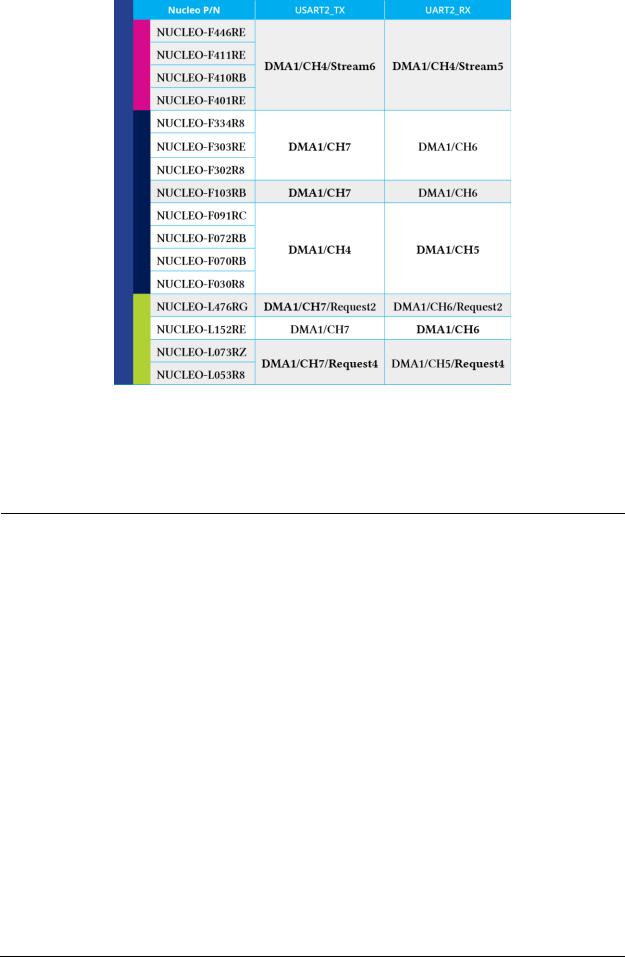
•Канал DMA1 (или пара канал/поток DMA1 для плат Nucleo на основе STM32F4) сконфигурирован на передачу типа память-в-периферию (см. таблицу 12).
•Соответствующий канал готов к выполнению передачи, и UART включен в режиме DMA.
Управление DMA |
256 |
Таблица 12: Как каналы DMA USART_TX/USART_RX отображаются в микроконтроллерах, оснащающих платы Nucleo
В следующем примере, который предназначен для работы на Nucleo-F030 (см. примеры книги для других плат Nucleo), показано, как легко это сделать.
Имя файла: src/main-ex1.c
43MX_DMA_Init();
44MX_USART2_UART_Init();
46hdma_usart2_tx.Instance = DMA1_Channel4;
47hdma_usart2_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
48hdma_usart2_tx.Init.PeriphInc = DMA_PINC_DISABLE;
49hdma_usart2_tx.Init.MemInc = DMA_MINC_ENABLE;
50hdma_usart2_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
51hdma_usart2_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
52hdma_usart2_tx.Init.Mode = DMA_NORMAL;
53hdma_usart2_tx.Init.Priority = DMA_PRIORITY_LOW;
54 |
HAL_DMA_Init(&hdma_usart2_tx); |
55 |
|
56HAL_DMA_Start(&hdma_usart2_tx, (uint32_t)msg, (uint32_t)&huart2.Instance->TDR, \
57strlen(msg));
58// Включение UART в режиме DMA
59huart2.Instance->CR3 |= USART_CR3_DMAT;
60// Ожидание завершения передачи
61HAL_DMA_PollForTransfer(&hdma_usart2_tx, HAL_DMA_FULL_TRANSFER, HAL_MAX_DELAY);
62// Отключение режима DMA в UART
63huart2.Instance->CR3 &= ~USART_CR3_DMAT;
64// Включение LD2
65HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_SET);
Управление DMA |
257 |
Переменная hdma_usart2_tx является экземпляром структуры DMA_HandleTypeDef, замеченной ранее. Здесь мы конфигурируем DMA1_Channel4 для выполнения передачи типа па- мять-в-периферию. Поскольку периферийное устройство USART имеет регистр передачи данных (Transmit Data Register, TDR) размером в один байт, мы конфигурируем DMA таким образом, чтобы периферийный адрес не увеличивался автоматически (DMA_PINC_DISABLE), в то же время мы хотим, чтобы адрес памяти источника автоматически увеличивался после каждой отправки байта (DMA_MINC_ENABLE). Как только конфигурация завершена, мы вызываем HAL_DMA_Init(), которая выполняет конфигурацию интерфейса DMA в соответствии с информацией, предоставленной в структуре hdma_usart2_tx.Init. Далее в строке 56 мы вызываем процедуру HAL_DMA_Start(), которая конфигурирует адрес памяти источника (то есть адрес массива msg), периферийный адрес пункта назначения (то есть адрес регистра USART2->TDR) и количество данных, которые мы собираемся передать. Теперь DMA готов к отправке, и мы начинаем передачу, устанавливая соответствующий бит периферийного устройства USART2, как показано в строке 59. Наконец, обратите внимание, что функция MX_DMA_Init() (вызывается в строке 43) использует макрос __HAL_RCC_DMA1_CLK_ENABLE() для включения контроллера DMA1 (помните, что почти каждый внутренний модуль STM32 должен быть включен с помо-
щью макроса __HAL_RCC_<ПЕРИФЕРИЙНОЕ_УСТРОЙСТВО>_CLK_ENABLE()).
Поскольку мы не знаем, сколько времени потребуется, чтобы завершить процедуру передачи, мы используем функцию:
HAL_StatusTypeDef HAL_DMA_PollForTransfer(DMA_HandleTypeDef *hdma,
uint32_t CompleteLevel, uint32_t Timeout);
которая автоматически ожидает полного завершения передачи. Данный способ отправки данных в режиме DMA называется «режим опроса» в официальной документации ST. Как только передача завершена, мы отключаем режим DMA у UART2 и включаем светодиод LD2.
9.2.5. Как выполнять передачи в режиме прерываний
С точки зрения производительности передача через DMA в режиме опроса не имеет смысла, если только нашему коду не нужно ждать завершения передачи. Если наша цель состоит в том, чтобы улучшить общую производительность, нет никаких причин использовать контроллер DMA, при этом затрачивая много тактовых циклов ЦПУ, ожидающих завершения передачи. Таким образом, лучший вариант – подготовить DMA и позволить ему уведомить нас о завершении передачи. DMA может генерировать прерывания, связанные с действиями канала (например, DMA1 в микроконтроллере STM32F030 имеет один IRQ для канала 1, один – для каналов 2 и 3 и один – для каналов 4 и 5). Кроме того, доступны три независимых бита разрешения для разрешения IRQ
при половинной передаче, полной передаче и ошибке передачи.
DMA можно включить в режиме прерываний, выполнив следующие действия:
•определить три функции, выступающие в качестве процедур обратного вызова,
и передать их указателям на функции XferCpltCallback, XferHalfCpltCallback и XferErrorCallback в дескрипторе DMA_HandleTypeDef (это в порядке вещей – опре-
делять только те функции, которые нам интересны, при этом надо установить соответствующий указатель на NULL, в противном случае могут возникнуть странные ошибки);
Управление DMA |
258 |
•написать ISR для IRQ, связанного с каналом, который вы используете, и выполнить вызов HAL_DMA_IRQHandler(), передав указатель на дескриптор
DMA_HandleTypeDef;
•разрешить соответствующий IRQ в контроллере NVIC;
•использовать функцию HAL_DMA_Start_IT(), которая автоматически выполняет все необходимые для вас шаги конфигурации, передавая ей те же аргументы, что и
HAL_DMA_Start().
«Пуристы производительности» будут разочарованы тем, как HAL управляет прерываниями DMA. Фактически, он разрешает по умолчанию все доступные IRQ для используемого канала, даже если мы не заинтересованы в некоторых из них (например, мы можем не интересоваться захватом прерывания при половинной передаче). Если производительность для вас принципиальна, взгляните на код HAL_DMA_Start_IT() и измените его в соответствии с вашими потребностями. К сожалению, ST решила спроектировать HAL таким образом, чтобы он абстрагировал многие детали от пользователя за счет скорости.
Важно отметить кое-что об обратных вызовах XferCpltCallback, XferHalfCpltCallback и XferErrorCallback: их нужно устанавливать, когда мы используем DMA без посредничества CubeHAL. Разъясним эту концепцию.
Предположим, что мы используем UART2 в режиме DMA. Если мы сами осуществляем управление DMA, тогда можно определить эти процедуры обратного вызова и управлять необходимыми конфигурациями, связанными с прерываниями UART, каждый раз, когда происходит передача. Однако, если мы
используем процедуры HAL_UART_Trasmit_DMA()/HAL_UART_Receive_DMA(), то HAL
уже корректно определяет эти обратные вызовы, и нам не нужно их изменять. Вместо того, чтобы, например, захватить событие завершения DMA для UART, нам нужно определить функцию HAL_UART_RxCpltCallback(). Всегда обращайтесь к документации по HAL для периферийного устройства, которое вы собираетесь использовать в режиме DMA.
В следующем примере показано, как выполнить передачу DMA типа память-в-перифе- рию в режиме прерываний.
Имя файла: src/main-ex2.c
47hdma_usart2_tx.Instance = DMA1_Channel4;
48hdma_usart2_tx.Init.Direction = DMA_MEMORY_TO_PERIPH;
49hdma_usart2_tx.Init.PeriphInc = DMA_PINC_DISABLE;
50hdma_usart2_tx.Init.MemInc = DMA_MINC_ENABLE;
51hdma_usart2_tx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
52hdma_usart2_tx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
53hdma_usart2_tx.Init.Mode = DMA_NORMAL;
54hdma_usart2_tx.Init.Priority = DMA_PRIORITY_LOW;
55hdma_usart2_tx.XferCpltCallback = &DMATransferComplete;
56HAL_DMA_Init(&hdma_usart2_tx);
57
58/* Инициализация прерываний DMA */
59HAL_NVIC_SetPriority(DMA1_Channel4_5_IRQn, 0, 0);
60HAL_NVIC_EnableIRQ(DMA1_Channel4_5_IRQn);
61
|
Управление DMA |
259 |
62 |
HAL_DMA_Start_IT(&hdma_usart2_tx, (uint32_t)msg, |
\ |
63 |
(uint32_t)&huart2.Instance->TDR, |
strlen(msg)); |
64// Включение UART в режиме DMA
65huart2.Instance->CR3 |= USART_CR3_DMAT;
67/* Бесконечный цикл */
68while (1);
69}
70
71void DMATransferComplete(DMA_HandleTypeDef *hdma) {
72if(hdma->Instance == DMA1_Channel4) {
73// Отключение режима DMA в UART
74huart2.Instance->CR3 &= ~USART_CR3_DMAT;
75// Включение LD2
76HAL_GPIO_WritePin(LD2_GPIO_Port, LD2_Pin, GPIO_PIN_SET);
77}
9.2.6.Как выполнять передачи типа периферия-в-периферию
Официальная документация ST подробно описывает передачи типа периферия-в-перифе- рию с использованием DMA в микроконтроллерах F0/F1/F3/L0/L1/L4. Но, глядя на справочные руководства и демонстрационные проекты, представленные в CubeHAL, невозможно найти какой-либо вразумительный пример того, как использовать эту функцию. Даже в Интернете (и на официальном форуме ST) нет никаких подсказок о том, как ее использовать. Во-первых, я подумал, что очевидным следствием является тот факт, что периферийные устройства – это память, отображаемая в адресном пространстве 4 ГБ. Тогда передача типа периферия-в-периферию будет просто частным случаем передачи типа периферия-в-память. Вместо этого, выполнив некоторые тесты, я пришел к выводу, что эта функция требует, чтобы DMA был специально спроектирован для обеспечения запуска передач между различными периферийными устройствами. Проводя некоторые эксперименты, я обнаружил, что в микроконтроллерах F2/F4/F7/L1/L4 только контроллер DMA2 имеет полный доступ к матричной шине, и он является единственным (вместе с ядром Cortex), который может выполнять передачи типа периферия-в-перифе-
рию.
Данная функция может быть полезна, когда мы хотим обмениваться данными между двумя периферийными устройствами без вмешательства ядра Cortex. В следующем примере показано, как переключать светодиод LD2 платы Nucleo, отправляя последовательность сообщений от периферийного устройства UART214.
Имя файла: src/main-ex3.c
45hdma_usart2_rx.Instance = DMA1_Channel5;
46hdma_usart2_rx.Init.Direction = DMA_PERIPH_TO_MEMORY;
47hdma_usart2_rx.Init.PeriphInc = DMA_PINC_DISABLE;
48hdma_usart2_rx.Init.MemInc = DMA_MINC_DISABLE;
49hdma_usart2_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE;
50hdma_usart2_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE;
51hdma_usart2_rx.Init.Mode = DMA_CIRCULAR;
14 Пример предназначен для запуска на Nucleo-F030. Для плат Nucleo, основанных на микроконтроллерах F2/F4/L1/L4, пример разработан для работы с UART1, чьи запросы к DMA связаны с DMA2.

Управление DMA |
260 |
52hdma_usart2_rx.Init.Priority = DMA_PRIORITY_LOW;
53HAL_DMA_Init(&hdma_usart2_rx);
54
55 __HAL_RCC_DMA1_CLK_ENABLE(); 56
57HAL_DMA_Start(&hdma_usart2_rx, (uint32_t)&huart2.Instance->RDR, (uint32_t)&GPIOA->ODR, 1);
58// Включение UART в режиме DMA
59huart2.Instance->CR3 |= USART_CR3_DMAR;
На этот раз мы конфигурируем канал на передачу типа периферия-в-память, не увеличивая ни адрес источника – периферийного регистра (регистр данных UART), ни целевую ячейку памяти, которая в нашем случае является адресом регистра GPIOA->ODR. В конечном счете, канал сконфигурирован на работу в циклическом режиме: это приведет к тому, что все байты, передаваемые по UART, будут постоянно храниться в регистре
GPIOA->ODR.
Чтобы проверить пример, мы можем просто использовать следующий Python-скрипт:
Имя файла: src/uartsend.py
1#!/usr/bin/env python
2import serial, time
4SERIAL_PORT = "/dev/tty.usbmodem1a1213" #Пользователи Windows, замените на "COMx"
5ser = serial.Serial(SERIAL_PORT, 38400)
7while True:
8ser.write((0xff,))
9time.sleep(0.05)
10ser.write((0,))
11time.sleep(0.05)
13ser.close()
Этот код действительно говорит сам за себя. Мы используем модуль pyserial, чтобы открыть новое последовательное соединение в VCP Nucleo. Затем мы запускаем бесконечный цикл, который отправляет байты 0xFF и 0x0 поочередно. Это приведет к тому, что GPIOA->ODR примет одно и то же значение (то есть, первые восемь I/O будут поочередно становиться ВЫСОКИМИ и НИЗКИМИ), а светодиод LD2 платы Nucleo будет мигать. Как видите, ядро Cortex-M ничего не знает о том, что происходит между UART2 и перифе-
рией GPIOA.
9.2.7.Использование модуля HAL_UART для передачи в режиме
DMA
В Главе 8 мы не указали, как использовать UART в режиме DMA. Мы уже видели в предыдущих параграфах, как это сделать. Однако нам пришлось поиграть с некоторыми регистрами USART, чтобы включить периферийное устройство в режиме DMA.
Модуль HAL_UART разработан для абстрагирования от всех базовых аппаратных подробностей. Необходимые для его использования шаги, следующие:

Управление DMA |
261 |
•сконфигурировать канал/поток DMA, подключенный к UART, который вы собираетесь использовать, как было показано в данной главе;
•связать UART_HandleTypeDef с DMA_HandleTypeDef, используя __HAL_LINKDMA();
•разрешить прерывание DMA, связанное с используемым вами каналом/потоком, и вызвать процедуру HAL_DMA_IRQHandler() из соответствующей ISR;
•разрешить прерывание, связанное с UART, и вызвать процедуру
HAL_UART_IRQHandler() из соответствующей ISR (это действительно важно, не пропустите этот шаг15);
•Использовать функции HAL_UART_Transmit_DMA() и HAL_UART_Receive_DMA() для об-
мена данными по UART и быть готовым получить уведомление о завершении
передачи с помощью HAL_UART_RxCpltCallback().
Следующий код показывает, как получить три байта от UART2 в режиме DMA в микроконтроллере STM32F03016:
uint8_t dataArrived = 0;
int main(void) { HAL_Init();
Nucleo_BSP_Init(); //Конфигурация UART2
//Конфигурация канала 5 DMA1, который подключен к линии запроса UART2_RX hdma_usart2_rx.Instance = DMA1_Channel5;
hdma_usart2_rx.Init.Direction = DMA_PERIPH_TO_MEMORY; hdma_usart2_rx.Init.PeriphInc = DMA_PINC_DISABLE; hdma_usart2_rx.Init.MemInc = DMA_MINC_ENABLE; hdma_usart2_rx.Init.PeriphDataAlignment = DMA_PDATAALIGN_BYTE; hdma_usart2_rx.Init.MemDataAlignment = DMA_MDATAALIGN_BYTE; hdma_usart2_rx.Init.Mode = DMA_NORMAL; hdma_usart2_rx.Init.Priority = DMA_PRIORITY_LOW; HAL_DMA_Init(&hdma_usart2_rx);
// Связывание дескриптора DMA с дескриптором UART2
__HAL_LINKDMA(&huart, hdmarx, hdma_usart2_rx);
/* Инициализация прерываний DMA */
HAL_NVIC_SetPriority(DMA1_Channel4_5_IRQn, 0, 0);
HAL_NVIC_EnableIRQ(DMA1_Channel4_5_IRQn);
/* Инициализация прерываний периферии */
HAL_NVIC_SetPriority(USART2_IRQn, 0, 0); HAL_NVIC_EnableIRQ(USART2_IRQn);
// Получение трех байт от UART2 в режиме DMA
15Очень важно разрешить прерывание, связанное с UART, и вызвать процедуру HAL_UART_IRQHandler(), поскольку HAL спроектирован так, что ошибки, связанные с UART (например, ошибка проверки четности, ошибка вследствие переполнения и т. д.), могут возникать даже тогда, когда UART управляется в режиме DMA. Улавливая условие ошибки, HAL приостанавливает передачу через DMA и вызывает соответствующий обратный вызов ошибки, чтобы сообщить об условии ошибки уровню приложения.
16Организация кода инициализации DMA для других микроконтроллеров STM32 оставлена читателю в качестве упражнения.
Управление DMA |
262 |
uint8_t data[3]; HAL_UART_Receive_DMA(&huart2, &data, 3);
while(!dataArrived); //Ожидание прибытия данных от UART
/* Бесконечный цикл */ while (1);
}
//Этот обратный вызов автоматически вызывается HAL,когда передача через DMA завершена void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) {
dataArrived = 1;
}
void DMA1_Channel4_5_IRQHandler(void) { HAL_DMA_IRQHandler(&hdma_usart2_rx); //Это автоматически вызовет \
HAL_UART_RxCpltCallback()
}
Где именно вызывается HAL_UART_RxCpltCallback()? В предыдущих параграфах мы видели, что DMA_HandleTypeDef содержит указатель (названный XferCpltCallback) на функцию, которая вызывается процедурой HAL_DMA_IRQHandler(), когда передача через DMA была завершена. Однако, когда мы используем модуль HAL для выбранного периферийного устройства (в данном случае HAL_UART), нам не нужно предоставлять наши собственные обратные вызовы: они определяются внутри HAL, который использует их для выполнения своих действий. HAL предоставляет нам возможность определить наши соответствующие функции обратного вызова (HAL_UART_RxCpltCallback() для передач UART_RX в режиме DMA), которые будут автоматически вызываться HAL, как показано на рисунке 7. Это правило применяется ко всем модулям HAL.
Рисунок 7: Последовательность вызовов, сгенерированная HAL_DMA_IRQHandler()
Как видите, освоив работу контроллера DMA, очень просто использовать периферийное устройство с применением данного режима передачи.