

- •Оглавление
- •Предисловие
- •Почему я написал книгу?
- •Для кого эта книга?
- •Как использовать эту книгу?
- •Как организована книга?
- •Об авторе
- •Ошибки и предложения
- •Поддержка книги
- •Как помочь автору
- •Отказ от авторского права
- •Благодарность за участие
- •Перевод
- •Благодарности
- •I Введение
- •1. Введение в ассортимент микроконтроллеров STM32
- •1.1. Введение в процессоры на базе ARM
- •1.1.1. Cortex и процессоры на базе Cortex-M
- •1.1.1.10. Внедренные функции Cortex-M в ассортименте STM32
- •1.2. Введение в микроконтроллеры STM32
- •1.2.1. Преимущества ассортимента STM32….
- •1.2.2. ….И его недостатки
- •1.3. Краткий обзор подсемейств STM32
- •1.3.1. Серия F0
- •1.3.2. Серия F1
- •1.3.3. Серия F2
- •1.3.4. Серия F3
- •1.3.5. Серия F4
- •1.3.6. Серия F7
- •1.3.7. Серия H7
- •1.3.8. Серия L0
- •1.3.9. Серия L1
- •1.3.10. Серия L4
- •1.3.11. Серия L4+
- •1.3.12. Серия STM32WB
- •1.3.13. Как правильно выбрать для себя микроконтроллер?
- •1.4. Отладочная плата Nucleo
- •2. Установка инструментария
- •2.1. Почему выбирают Eclipse/GCC в качестве инструментария для STM32
- •2.1.1. Два слова о Eclipse…
- •2.2. Windows – Установка инструментария
- •2.2.1. Windows – Установка Eclipse
- •2.2.2. Windows – Установка плагинов Eclipse
- •2.2.3. Windows – Установка GCC ARM Embedded
- •2.2.4. Windows – Установка инструментов сборки
- •2.2.5. Windows – Установка OpenOCD
- •2.2.6. Windows – Установка инструментов ST и драйверов
- •2.3. Linux – Установка инструментария
- •2.3.2. Linux – Установка Java
- •2.3.3. Linux – Установка Eclipse
- •2.3.4. Linux – Установка плагинов Eclipse
- •2.3.5. Linux – Установка GCC ARM Embedded
- •2.3.6. Linux – Установка драйверов Nucleo
- •2.3.7. Linux – Установка OpenOCD
- •2.3.8. Linux – Установка инструментов ST
- •2.4. Mac – Установка инструментария
- •2.4.1. Mac – Установка Eclipse
- •2.4.2. Mac – Установка плагинов Eclipse
- •2.4.3. Mac – Установка GCC ARM Embedded
- •2.4.4. Mac – Установка драйверов Nucleo
- •2.4.5. Mac – Установка OpenOCD
- •2.4.6. Mac – Установка инструментов ST
- •3. Hello, Nucleo!
- •3.1. Прикоснитесь к Eclipse IDE
- •3.2. Создание проекта
- •3.3. Подключение Nucleo к ПК
- •3.5. Изучение сгенерированного кода
- •4. Инструмент STM32CubeMX
- •4.1. Введение в инструмент CubeMX
- •4.1.1. Представление Pinout
- •4.1.2. Представление Clock Configuration
- •4.1.3. Представление Configuration
- •4.1.4. Представление Power Consumption Calculator
- •4.2. Генерация проекта
- •4.2.1. Генерация проекта Си при помощи CubeMX
- •4.2.2. Создание проекта Eclipse
- •4.2.3. Ручное импортирование сгенерированных файлов в проект Eclipse
- •4.3. Изучение сгенерированного кода приложения
- •4.3.1. Добавим что-нибудь полезное в микропрограмму
- •4.4. Загрузка исходного кода примеров книги
- •5. Введение в отладку
- •5.1. Начало работы с OpenOCD
- •5.1.1. Запуск OpenOCD
- •5.1.2. Подключение к OpenOCD Telnet Console
- •5.1.3. Настройка Eclipse
- •5.1.4. Отладка в Eclipse
- •5.2. Полухостинг ARM
- •5.2.1. Включение полухостинга в новом проекте
- •5.2.2. Включение полуохостинга в существующем проекте
- •5.2.3. Недостатки полухостинга
- •5.2.4. Как работает полухостинг
- •II Погружение в HAL
- •6. Управление GPIO
- •6.2. Конфигурация GPIO
- •6.2.1. Режимы работы GPIO
- •6.2.2. Режим альтернативной функции GPIO
- •6.2.3. Понятие скорости GPIO
- •6.3. Управление GPIO
- •6.4. Деинициализация GPIO
- •7. Обработка прерываний
- •7.1. Контроллер NVIC
- •7.1.1. Таблица векторов в STM32
- •7.2. Разрешение прерываний
- •7.2.1. Линии запроса внешних прерываний и контроллер NVIC
- •7.2.2. Разрешение прерываний в CubeMX
- •7.3. Жизненный цикл прерываний
- •7.4. Уровни приоритета прерываний
- •7.4.1. Cortex-M0/0+
- •7.4.2. Cortex-M3/4/7
- •7.4.3. Установка уровня прерываний в CubeMX
- •7.5. Реентерабельность прерываний
- •8. Универсальные асинхронные последовательные средства связи
- •8.1. Введение в UART и USART
- •8.2. Инициализация UART
- •8.3. UART-связь в режиме опроса
- •8.3.1. Установка консоли последовательного порта в Windows
- •8.3.2. Установка консоли последовательного порта в Linux и MacOS X
- •8.4. UART-связь в режиме прерываний
- •8.5. Обработка ошибок
- •8.6. Перенаправление ввода-вывода
- •9. Управление DMA
- •9.1. Введение в DMA
- •9.1.1. Необходимость DMA и роль внутренних шин
- •9.1.2. Контроллер DMA
- •9.2. Модуль HAL_DMA
- •9.2.1. DMA_HandleTypeDef в HAL для F0/F1/F3/L0/L1/L4
- •9.2.2. DMA_HandleTypeDef в HAL для F2/F4/F7
- •9.2.3. DMA_HandleTypeDef в HAL для L0/L4
- •9.2.4. Как выполнять передачи в режиме опроса
- •9.2.5. Как выполнять передачи в режиме прерываний
- •9.2.8. Разнообразные функции модулей HAL_DMA и HAL_DMA_Ex
- •9.3. Использование CubeMX для конфигурации запросов к DMA
- •10. Схема тактирования
- •10.1. Распределение тактового сигнала
- •10.1.1. Обзор схемы тактирования STM32
- •10.1.1.1. Многочастотный внутренний RC-генератор в семействах STM32L
- •10.1.3.1. Подача тактового сигнала от высокочастотного генератора
- •10.1.3.2. Подача тактового сигнала от 32кГц генератора
- •10.2. Обзор модуля HAL_RCC
- •10.2.1. Вычисление тактовой частоты во время выполнения
- •10.2.2. Разрешение Выхода синхронизации
- •10.2.3. Разрешение Системы защиты тактирования
- •10.3. Калибровка HSI-генератора
- •11. Таймеры
- •11.1. Введение в таймеры
- •11.1.1. Категории таймеров в микроконтроллере STM32
- •11.1.2. Доступность таймеров в ассортименте STM32
- •11.2. Базовые таймеры
- •11.2.1. Использование таймеров в режиме прерываний
- •11.2.2. Использование таймеров в режиме опроса
- •11.2.3. Использование таймеров в режиме DMA
- •11.2.4. Остановка таймера
- •11.3. Таймеры общего назначения
- •11.3.1.1. Режим внешнего тактирования 2
- •11.3.1.2. Режим внешнего тактирования 1
- •11.3.2. Режимы синхронизации ведущего/ведомого таймеров
- •11.3.2.1. Разрешение прерываний, относящихся к триггерной цепи
- •11.3.2.2. Использование CubeMX для конфигурации синхронизации ведущего/ведомого устройств
- •11.3.3. Программная генерация связанных с таймером событий
- •11.3.4. Режимы отсчета
- •11.3.5. Режим захвата входного сигнала
- •11.3.5.1. Использование CubeMX для конфигурации режима захвата входного сигнала
- •11.3.6. Режим сравнения выходного сигнала
- •11.3.6.1. Использование CubeMX для конфигурации режима сравнения выходного сигнала
- •11.3.7. Генерация широтно-импульсного сигнала
- •11.3.7.1. Генерация синусоидального сигнала при помощи ШИМ
- •11.3.7.2. Использование CubeMX для конфигурации режима ШИМ
- •11.3.8. Одноимпульсный режим
- •11.3.8.1. Использование CubeMX для конфигурации одноимпульсного режима
- •11.3.9. Режим энкодера
- •11.3.9.1. Использование CubeMX для конфигурации режима энкодера
- •11.3.10.1. Режим датчика Холла
- •11.3.10.2. Комбинированный режим трехфазной ШИМ и другие функции управления двигателем
- •11.3.10.3. Вход сброса таймера и блокировка регистров таймера
- •11.3.10.4. Предварительная загрузка регистра автоперезагрузки
- •11.3.11. Отладка и таймеры
- •11.4. Системный таймер SysTick
- •12. Аналого-цифровое преобразование
- •12.1. Введение в АЦП последовательного приближения
- •12.2. Модуль HAL_ADC
- •12.2.1. Режимы преобразования
- •12.2.1.1. Режим однократного преобразования одного канала
- •12.2.1.2. Режим сканирования с однократным преобразованием
- •12.2.1.3. Режим непрерывного преобразования одного канала
- •12.2.1.4. Режим сканирования с непрерывным преобразованием
- •12.2.1.5. Режим преобразования инжектированных каналов
- •12.2.1.6. Парный режим
- •12.2.2. Выбор канала
- •12.2.3. Разрядность АЦП и скорость преобразования
- •12.2.4. Аналого-цифровые преобразования в режиме опроса
- •12.2.6. Аналого-цифровые преобразования в режиме DMA
- •12.2.6.1. Многократное преобразование одного канала в режиме DMA
- •12.2.6.3. Непрерывные преобразования в режиме DMA
- •12.2.7. Обработка ошибок
- •12.2.8. Преобразования, управляемые таймером
- •12.2.9. Преобразования, управляемые внешними событиями
- •12.2.10. Калибровка АЦП
- •12.3. Использование CubeMX для конфигурации АЦП
- •13.1. Введение в периферийное устройство ЦАП
- •13.2. Модуль HAL_DAC
- •13.2.1. Управление ЦАП вручную
- •13.2.2. Управление ЦАП в режиме DMA с использованием таймера
- •13.2.3. Генерация треугольного сигнала
- •13.2.4. Генерация шумового сигнала
- •14.1. Введение в спецификацию I²C
- •14.1.1. Протокол I²C
- •14.1.1.1. START- и STOP-условия
- •14.1.1.2. Формат байта
- •14.1.1.3. Кадр адреса
- •14.1.1.4. Биты «Подтверждено» (ACK) и «Не подтверждено» (NACK)
- •14.1.1.5. Кадры данных
- •14.1.1.6. Комбинированные транзакции
- •14.1.1.7. Удержание синхросигнала
- •14.1.2. Наличие периферийных устройств I²C в микроконтроллерах STM32
- •14.2. Модуль HAL_I2C
- •14.2.1.1. Операции I/O MEM
- •14.2.1.2. Комбинированные транзакции
- •14.3. Использование CubeMX для конфигурации периферийного устройства I²C
- •15.1. Введение в спецификацию SPI
- •15.1.1. Полярность и фаза тактового сигнала
- •15.1.2. Управление сигналом Slave Select
- •15.1.3. Режим TI периферийного устройства SPI
- •15.1.4. Наличие периферийных устройств SPI в микроконтроллерах STM32
- •15.2. Модуль HAL_SPI
- •15.2.1. Обмен сообщениями с использованием периферийного устройства SPI
- •15.2.2. Максимальная частота передачи, достижимая при использовании CubeHAL
- •15.3. Использование CubeMX для конфигурации периферийного устройства SPI
- •16. Циклический контроль избыточности
- •16.1. Введение в расчет CRC
- •16.1.1. Расчет CRC в микроконтроллерах STM32F1/F2/F4/L1
- •16.2. Модуль HAL_CRC
- •17. Независимый и оконный сторожевые таймеры
- •17.1. Независимый сторожевой таймер
- •17.1.1. Использование CubeHAL для программирования таймера IWDG
- •17.2. Системный оконный сторожевой таймер
- •17.2.1. Использование CubeHAL для программирования таймера WWDG
- •17.3. Отслеживание системного сброса, вызванного сторожевым таймером
- •17.4. Заморозка сторожевых таймеров во время сеанса отладки
- •17.5. Выбор сторожевого таймера, подходящего для вашего приложения
- •18. Часы реального времени
- •18.1. Введение в периферийное устройство RTC
- •18.2. Модуль HAL_RTC
- •18.2.1. Установка и получение текущей даты/времени
- •18.2.1.1. Правильный способ чтения значений даты/времени
- •18.2.2. Конфигурирование будильников
- •18.2.3. Блок периодического пробуждения
- •18.2.5. Калибровка RTC
- •18.2.5.1. Грубая калибровка RTC
- •18.2.5.2. Тонкая калибровка RTC
- •18.2.5.3. Обнаружение опорного тактового сигнала
- •18.3. Использование резервной SRAM
- •III Дополнительные темы
- •19. Управление питанием
- •19.1. Управление питанием в микроконтроллерах на базе Cortex-M
- •19.2. Как микроконтроллеры Cortex-M управляют рабочим и спящим режимами
- •19.2.1. Переход в/выход из спящих режимов
- •19.2.1.1. «Спящий режим по выходу»
- •19.3. Управление питанием в микроконтроллерах STM32F
- •19.3.1. Источники питания
- •19.3.2. Режимы питания
- •19.3.2.1. Рабочий режим
- •19.3.2.2. Спящий режим
- •19.3.2.3. Режим останова
- •19.3.2.4. Режим ожидания
- •19.3.2.5. Пример работы в режимах пониженного энергопотребления
- •19.4. Управление питанием в микроконтроллерах STM32L
- •19.4.1. Источники питания
- •19.4.2. Режимы питания
- •19.4.2.1. Рабочие режимы
- •19.4.2.2. Спящие режимы
- •19.4.2.2.1. Режим пакетного сбора данных
- •19.4.2.3. Режимы останова
- •19.4.2.4. Режимы ожидания
- •19.4.2.5. Режим выключенного состояния
- •19.4.3. Переходы между режимами питания
- •19.4.4. Периферийные устройства с пониженным энергопотреблением
- •19.4.4.1. LPUART
- •19.4.4.2. LPTIM
- •19.5. Инспекторы источников питания
- •19.6. Отладка в режимах пониженного энергопотребления
- •19.7. Использование калькулятора энергопотребления CubeMX
- •20. Организация памяти
- •20.1. Модель организации памяти в STM32
- •20.1.1. Основы процессов компиляции и компоновки
- •20.2.1. Исследование бинарного ELF-файла
- •20.2.2. Инициализация секций .data и .bss
- •20.2.2.1. Пара слов о секции COMMON
- •20.2.3. Секция .rodata
- •20.2.4. Области Стека и Кучи
- •20.2.5. Проверка размера Кучи и Стека на этапе компиляции
- •20.2.6. Различия с файлами скриптов инструментария
- •20.3. Как использовать CCM-память
- •20.3.1. Перемещение таблицы векторов в CCM-память
- •20.4.1. Программирование MPU с использованием CubeHAL
- •21. Управление Flash-памятью
- •21.1. Введение во Flash-память STM32
- •21.2. Модуль HAL_FLASH
- •21.2.1. Разблокировка Flash-памяти
- •21.2.2. Стирание Flash-памяти
- •21.2.3. Программирование Flash-памяти
- •21.3. Байты конфигурации
- •21.3.1. Защита от чтения Flash-памяти
- •21.4. Дополнительные памяти OTP и EEPROM
- •21.5. Задержка чтения Flash-памяти и ускоритель ART™ Accelerator
- •21.5.1. Роль TCM-памятей в микроконтроллерах STM32F7
- •22. Процесс начальной загрузки
- •22.1.1. Программное физическое перераспределение памяти
- •22.1.2. Перемещение таблицы векторов
- •22.1.3. Запуск микропрограммы из SRAM с помощью инструментария GNU MCU Eclipse
- •22.2. Встроенный загрузчик
- •22.2.1. Запуск загрузчика из встроенного программного обеспечения
- •22.2.2. Последовательность начальной загрузки в инструментарии GNU MCU Eclipse
- •22.3. Разработка пользовательского загрузчика
- •22.3.2. Как использовать инструмент flasher.py
- •23. Запуск FreeRTOS
- •23.1. Введение в концепции, лежащие в основе ОСРВ
- •23.2.1. Структура файлов с исходным кодом FreeRTOS
- •23.2.1.2. Как импортировать FreeRTOS с использованием CubeMX и CubeMXImporter
- •23.3. Управление потоками
- •23.3.1. Состояния потоков
- •23.3.2. Приоритеты потоков и алгоритмы планирования
- •23.3.3. Добровольное освобождение от управления
- •23.3.4. Холостой поток idle
- •23.4. Выделение памяти и управление ею
- •23.4.1. Модель динамического выделения памяти
- •23.4.1.1. heap_1.c
- •23.4.1.2. heap_2.c
- •23.4.1.3. heap_3.c
- •23.4.1.4. heap_4.c
- •23.4.1.5. heap_5.c
- •23.4.2. Модель статического выделения памяти
- •23.4.3. Пулы памяти
- •23.4.4. Обнаружение переполнения стека
- •23.5. Примитивы синхронизации
- •23.5.1. Очереди сообщений
- •23.5.2. Cемафоры
- •23.5.3. Сигналы потоков
- •23.6. Управление ресурсами и взаимное исключение
- •23.6.1. Мьютексы
- •23.6.2. Критические секции
- •23.6.3. Обработка прерываний совместно с ОСРВ
- •23.7. Программные таймеры
- •23.7.1. Как FreeRTOS управляет таймерами
- •23.8. Пример из практики: Управление энергосбережением с ОСРВ
- •23.8.1. Перехват холостого потока idle
- •23.8.2. Бестиковый режим во FreeRTOS
- •23.9. Возможности отладки
- •23.9.1. Макрос configASSERT()
- •23.9.2. Статистика среды выполнения и информация о состоянии потоков
- •23.10. Альтернативы FreeRTOS
- •23.10.1. ChibiOS
- •23.10.2. ОС Contiki
- •23.10.3. OpenRTOS
- •24. Продвинутые методы отладки
- •24.1. Введение в исключения отказов Cortex-M
- •24.1.1.1. Как инструментарий GNU MCU Eclipse обрабатывает исключения отказов
- •24.1.1.2. Как интерпретировать содержимое регистра LR при переходе в исключение
- •24.1.2. Исключения отказов и их анализ
- •24.2.1. Представление Expressions
- •24.2.1.1. Мониторы памяти
- •24.2.2. Точки наблюдения
- •24.2.3. Режим Instruction Stepping Mode
- •24.2.4. Keil Packs и представление Peripheral Registers
- •24.2.5. Представление Core Registers
- •24.3. Средства отладки от CubeHAL
- •24.4. Внешние отладчики
- •24.4.1. Использование SEGGER J-Link для отладчика ST-LINK
- •24.4.2. Использование интерфейса ITM и трассировка SWV
- •24.5. STM Studio
- •24.6. Одновременная отладка двух плат Nucleo
- •25. Файловая система FAT
- •25.1. Введение в библиотеку FatFs
- •25.1.1. Использование CubeMX для включения в ваши проекты библиотеки FatFs
- •25.1.2. Наиболее важные структуры и функции FatFs
- •25.1.2.1. Монтирование файловой системы
- •25.1.2.2. Открытие файлов
- •25.1.2.3. Чтение и запись файла
- •25.1.2.4. Создание и открытие каталога
- •25.1.3. Как сконфигурировать библиотеку FatFs
- •26. Разработка IoT-приложений
- •26.2. Ethernet контроллер W5500
- •26.2.1. Как использовать шилд W5500 и модуль ioLibrary_Driver
- •26.2.1.1. Конфигурирование интерфейса SPI
- •26.2.1.2. Настройка буферов сокетов и сетевого интерфейса
- •26.2.2. API-интерфейсы сокетов
- •26.2.2.1. Управление сокетами в режиме TCP
- •26.2.2.2. Управление сокетами в режиме UDP
- •26.2.3. Перенаправление ввода-вывода на сокет TCP/IP
- •26.2.4. Настройка HTTP-сервера
- •26.2.4.1. Веб-осциллограф
- •27. Начало работы над новым проектом
- •27.1. Проектирование оборудования
- •27.1.1. Послойная разводка печатной платы
- •27.1.2. Корпус микроконтроллера
- •27.1.3. Развязка выводов питания
- •27.1.4. Тактирование
- •27.1.5. Фильтрация вывода сброса RESET
- •27.1.6. Отладочный порт
- •27.1.7. Режим начальной загрузки
- •27.1.8. Обратите внимание на совместимость с выводами…
- •27.1.9. …и на выбор подходящей периферии
- •27.1.10. Роль CubeMX на этапе проектирования платы
- •27.1.11. Стратегии разводки платы
- •27.2. Разработка программного обеспечения
- •27.2.1. Генерация бинарного образа для производства
- •Приложение
- •Принудительный сброс микроконтроллера из микропрограммы
- •B. Руководство по поиску и устранению неисправностей
- •Проблемы с установкой GNU MCU Eclipse
- •Проблемы, связанные с Eclipse
- •Eclipse не может найти компилятор
- •Eclipse постоянно прерывается при выполнении каждой инструкции во время сеанса отладки
- •Пошаговая отладка очень медленная
- •Микропрограмма работает только в режиме отладки
- •Проблемы, связанные с STM32
- •Микроконтроллер не загружается корректно
- •Невозможно загрузить микропрограмму или отладить микроконтроллер
- •C. Схема выводов Nucleo
- •Nucleo-F446RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F411RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F410RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F401RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F334R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F303RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F302R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F103RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F091RC
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F072RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F070RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F030R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L476RG
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L152RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L073R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L053R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •D. Корпусы STM32
- •LFBGA
- •LQFP
- •TFBGA
- •TSSOP
- •UFQFPN
- •UFBGA
- •VFQFP
- •WLCSP
- •E. Изменения книги
- •Выпуск 0.1 – Октябрь 2015
- •Выпуск 0.2 – 28 октября 2015
- •Выпуск 0.2.1 – 31 октября 2015
- •Выпуск 0.2.2 – 1 ноября 2015
- •Выпуск 0.3 – 12 ноября 2015
- •Выпуск 0.4 – 4 декабря 2015
- •Выпуск 0.5 – 19 декабря 2015
- •Выпуск 0.6 – 18 января 2016
- •Выпуск 0.6.1 – 20 января 2016
- •Выпуск 0.6.2 – 30 января 2016
- •Выпуск 0.7 – 8 февраля 2016
- •Выпуск 0.8 – 18 февраля 2016
- •Выпуск 0.8.1 – 23 февраля 2016
- •Выпуск 0.9 – 27 марта 2016
- •Выпуск 0.9.1 – 28 марта 2016
- •Выпуск 0.10 – 26 апреля 2016
- •Выпуск 0.11 – 27 мая 2016
- •Выпуск 0.11.1 – 3 июня 2016
- •Выпуск 0.11.2 – 24 июня 2016
- •Выпуск 0.12 – 4 июля 2016
- •Выпуск 0.13 – 18 июля 2016
- •Выпуск 0.14 – 12 августа 2016
- •Выпуск 0.15 – 13 сентября 2016
- •Выпуск 0.16 – 3 октября 2016
- •Выпуск 0.17 – 24 октября 2016
- •Выпуск 0.18 – 15 ноября 2016
- •Выпуск 0.19 – 29 ноября 2016
- •Выпуск 0.20 – 28 декабря 2016
- •Выпуск 0.21 – 29 января 2017
- •Выпуск 0.22 – 2 мая 2017
- •Выпуск 0.23 – 20 июля 2017
- •Выпуск 0.24 – 11 декабря 2017
- •Выпуск 0.25 – 3 января 2018
- •Выпуск 0.26 – 7 мая 2018

I2C |
407 |
Прочитайте внимательно
Микроконтроллеры STM32F1 не предоставляют возможность подтягивания к питанию линий SDA и SCL. Их GPIO должны быть сконфигурированы как с открытым стоком, и для подтягивания к питанию линий I²C требуется два внешних резистора.
Будучи протоколом, основанным только на двух проводах, должен быть способ адресации каждого ведомого устройства на одной шине. По этой причине I²C определяет, что каждое ведомое устройство предоставляет уникальный адрес ведомого устройства для шины, на которой оно используется7. Адрес может быть шириной 7 или 10 бит (последний вариант довольно необычен).
Скорости шины I²C четко определены спецификацией протокола, однако не так уж редко можно встретить микросхемы, способные устанавливать пользовательские (и часто нечеткие) скорости обмена данными. Обычные частоты шины I²C – 100 кГц8, также известная как стандартный режим (standard mode), и 400 кГц, известная как быстрый режим (fast mode). Последние версии стандарта могут работать на более высоких скоростях (1 МГц, известная как быстрый режим плюс (fast mode plus), и 3,4 МГц, известная как
высокоскоростной режим (high speed mode), и 5 МГц, известная как сверхбыстрый режим
(ultra fast mode)).
Протокол I²C является достаточно простым протоколом, так что микроконтроллер может «имитировать» специально предназначенное периферийное устройство I²C, если он не предоставляет его: эта методика называется bit-banging9, и она обычно используется в достаточно недорогих 8-разрядных архитектурах, которые иногда не предоставляют выделенный интерфейс I²C в целях уменьшения количества выводов и/или стоимости ИС.
14.1.1. Протокол I²C
В протоколе I²C все транзакции всегда инициируются и завершаются ведущим устройством. Это одно из немногих правил данного коммуникационного протокола, которое необходимо учитывать при программировании (и, особенно, отладке) устройств I²C. Все сообщения, которыми обмениваются по шине I²C, разбиваются на два типа кадров: кадр адреса (address frame), где ведущее устройство указывает, какому ведомому устройству отправляется сообщение, и один или несколько кадров данных (data frames), которые являются 8-битными сообщениями с данными, передаваемыми от ведущего устройства ведомому или наоборот. Данные помещаются в линию SDA после того, как SCL
7Это является одним из наиболее существенных ограничений протокола I²C. Фактически, производители ИС редко выделяют достаточно выводов для конфигурации полного адреса ведомого устройства, используемого на плате (если вам повезет, для данной функции будет выделено не более трех выводов, предоставляя выбор только из восьми вариантов адресов ведомых устройств). При проектировании платы с несколькими устройствами, поддерживающими I²C, обратите внимание на их адрес, и в случае коллизии вам потребуется использовать два или более периферийных устройства I²C микроконтроллера для управления ими.
8Существуют ИС, поддерживающие связь только на более низких скоростях, но в настоящее время они встречаются редко.
9Bit-banging (не путать с технологией битовых лент bit-banding от ARM) – методика, представляющая собой режим программного управления выводами, симулируя таким образом аппаратную работу отсутствующего в микроконтроллере периферийного устройства. (прим. переводчика)

I2C |
408 |
устанавливается на низкий уровень, и отсчет данных начинается после того, как линия SCL устанавливается высокой. Время между фронтами синхросигнала и считыванием/записью данных определяется устройствами на шине и может варьироваться в различных микросхемах.
Как было сказано ранее, SDA и SCL являются двунаправленными линиями, подключенными к положительному напряжению питания через источник тока или подтягивающие резисторы (см. рисунок 1). Когда шина свободна, обе линии ВЫСОКИЕ. Выходные каскады подключенных к шине устройств должны быть с открытым стоком или с открытым коллектором для выполнения правила монтажного И (wired-AND feature)10. Емкость шины ограничивает количество подключаемых к ней интерфейсов. Для приложений с одним ведущим устройством выход SCL ведущего устройства может быть двухтактным драйвером (push-pull driver), если на шине нет устройств, которые могли бы удерживать (stretch) синхросигнал (подробнее об этом позже).
Теперь попробуем проанализировать основные этапы коммуникации по I²C.
Рисунок 2: Структура базового сообщения интерфейса I²C
14.1.1.1. START- и STOP-условия
Все транзакции начинаются со START-условия и заканчиваются STOP-условием (см. рисунок 2). Переход с ВЫСОКОГО логического уровня на НИЗКИЙ на линии SDA, в то время как на линии SCL ВЫСОКИЙ уровень, определяет START-условие. Переход с НИЗКОГО логического уровня к ВЫСОКОМУ на линии SDA, в то время как на линии SCL ВЫСОКИЙ уровень, определяет STOP-условие.
START- и STOP-условия всегда генерируются ведущим устройством. Шина считается занятой после возникновения START-условия. Шина считается свободной снова через определенное время после наступления STOP-условия. Шина остается занятой, если вместо STOP-условия генерируется повторное START-условие (также называемое RESTART-условием) (подробнее об этом в ближайшее время). В этом случае START- и RESTART-условия функционально идентичны.
14.1.1.2. Формат байта
Каждое слово, передаваемое по линии SDA, должно иметь размер 8 бит, и это также подразумевается для кадра адреса, как мы увидим через некоторое время. Количество байт, которое может быть передано за одну транзакцию, не ограничено. Каждый байт должен сопровождаться битом «Подтверждено» (Acknowledge, ACK). Сначала данные передаются со старшего значащего бита (Most Significant Bit, MSB) (см. рисунок 2). Если ведомое устройство не может получить или передать другой полный байт данных до тех пор, пока оно не выполнит какую-либо другую функцию, например, обслуживание внутреннего прерывания, оно может удерживать линию синхронизации SCL на НИЗКОМ логическом уровне, чтобы перевести ведущее устройство в состояние ожидания. Затем
10 Логический вентиль И, реализованный с использованием пассивных элементов, таких как резисторы и диоды. (прим. переводчика)

I2C |
409 |
передача данных продолжается, когда ведомое устройство готово к другому байту данных, и освобождает линию синхронизации SCL.
14.1.1.3. Кадр адреса
Кадр адреса всегда является первым в любой новой последовательности передачи. Для 7-разрядного адреса сначала следует старший значащий бит (MSB), за адресом следует бит R/W, указывающий, является ли это операцией чтения (1) или записи (0) (см. рисунок 2).
Рисунок 3: Структура сообщения в случае использования 10-разрядной адресации
В 10-разрядной системе адресации (см. рисунок 3) для передачи адреса ведомого устройства требуются два кадра. Первый кадр будет состоять из кода 1111 0XXD2, где XX – два MSB-бита 10-разрядного адреса ведомого устройства, а D – бит R/W, описанный выше. Бит ACK первого кадра будет утверждаться всеми ведомыми устройствами, адреса которых совпадают с двумя первыми MSB-битами переданного адреса. Как и при обычной 7-битной передаче, немедленно начинается другая передача, и эта передача содержит биты [7:0] передаваемого адреса ведомого устройства. На этом этапе адресуемое ведомое устройство должно ответить битом ACK. Если этого не происходит, то режим сбоя такой же, как и в 7-битной системе.
Обратите внимание, что устройства с 10-разрядным адресном могут сосуществовать с устройствами с 7-разрядным адресом, поскольку начальная часть адреса 11110 не является частью каких-либо допустимых 7-разрядных адресов.
14.1.1.4. Биты «Подтверждено» (ACK) и «Не подтверждено» (NACK)
После каждого байта следует бит ACK. Бит ACK позволяет приемнику сигнализировать передатчику11, что байт был успешно принят, и может быть отправлен другой байт. Ведущее устройство генерирует все синхроимпульсы по линии SCL, включая девятый синхроимпульс ACK.
Сигнал ACK формируется следующим образом: передатчик освобождает линию SDA во время синхроимпульса подтверждения ACK, таким образом приемник может притянуть линию SDA к НИЗКОМУ логическому уровню, при этом она должна оставаться стабильно НИЗКОЙ в течение периода ВЫСОКОГО уровня синхроимпульса. Если SDA остается в ВЫСОКОМ уровне в течение этого девятого синхроимпульса, то формируется сигнал «Не подтверждено» (Not Acknowledge, NACK). Далее ведущее устройство может сгенерировать либо STOP-условие для отмены передачи, либо RESTART-условие для начала новой передачи. Существует пять условий, приводящих к генерации NACK:
1.На шине отсутствует приемник по переданному адресу, поэтому нет устройства, которое ответило бы подтверждением ACK.
11 Обратите внимание, что здесь мы в общем говорим о приемнике и передатчике, поскольку бит ACK/NACK может быть установлен как ведущим, так и ведомым устройствами.
I2C |
410 |
2.Приемник не может принимать или передавать, потому что он выполняет некоторую функцию в реальном времени и не готов начать связь с ведущим устройством.
3.Во время передачи приемник получил данные или команды, которые он не понимает.
4.Во время передачи приемник больше не может получать байты данных.
5.Приемник ведущего устройства должен просигнализировать об окончании передачи ведомому передатчику.
Действие бита ACK/NACK обусловлено природой открытого стока протокола I²C. Открытый сток означает, что как ведущее, так и ведомое устройства, участвующие в транзакции, могут притягивать соответствующую сигнальную линию на НИЗКИЙ логический уровень, но не могут подтянуть ее на ВЫСОКИЙ. Если передатчик или приемник освобождает линию, то она автоматически подтягивается на ВЫСОКИЙ уровень соответствующим резистором, если другой не притягивает ее на НИЗКИЙ уровень. Природа открытого стока протокола I²C также гарантирует, что на шине не будет никакой конфликтной ситуации, когда одно устройство пытается вывести линию на ВЫСОКИЙ уровень, а другое пытается притянуть ее на НИЗКИЙ, тем самым исключая возможность повреждения устройств или чрезмерного рассеивания мощности в системе.
14.1.1.5. Кадры данных
После того, как был отправлен кадр адреса, могут начать передаваться данные. Ведущее устройство будет просто продолжать генерировать синхроимпульсы на SCL за равные промежутки времени, а данные будут помещаться на SDA ведущим или ведомым устройством, в зависимости от того, на операцию чтения или записи указывает бит R/W. Обычно первый байт или первые два байта содержат адрес регистра ведомого устройства для записи/чтения. Например, для I²C памяти EEPROM первые два байта, следующие за кадром адреса, представляют собой адрес ячейки памяти, участвующей в транзакции.
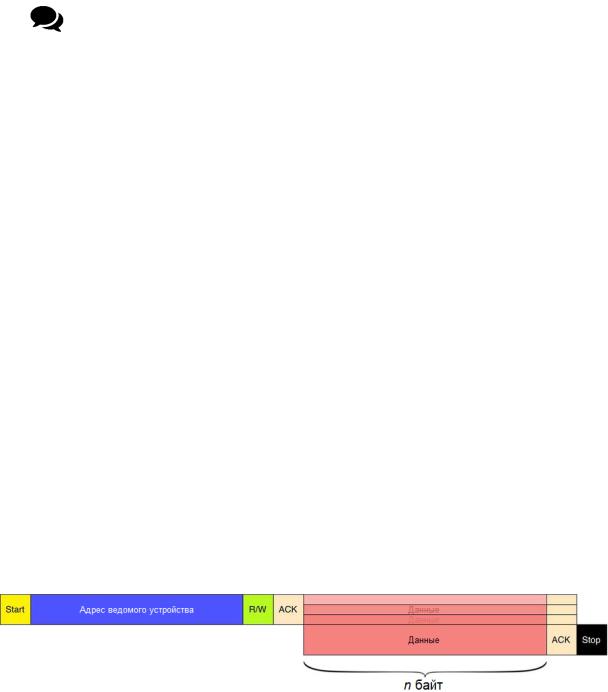
В зависимости от бита R/W последовательные байты заполняются ведущим (если бит R/W установлен в 1) или ведомым (если бит R/W равен 0) устройством. Количество кадров данных является произвольным, и большинство ведомых устройств автоматически инкрементируют внутренний регистр, что означает, что последующие операции чтения или записи будут поступать из следующего регистра в линии. Данный режим также называется последовательным (sequential) или пакетным (burst) режимом (см. рисунок
4), и это способ повысить скорость передачи.
Рисунок 4: Передача в пакетном режиме, когда несколько байт данных передается за одну транзакцию