


Управление питанием |
483 |
...
while(1) {
HAL_GPIO_TogglePin(LD2_GPIO_Port, LD2_Pin); HAL_Delay(500);
}
Этот с виду безобидный код оказывает существенное влияние на энергопотребление нашего устройства. Несмотря на то что нам особо не нужно много чего делать в течение этих 500 мс, мы тратим много энергии на проверку значения глобального счетчика тиков таймера SysTick, чтобы посмотреть, прошло ли это время задержки. Вместо этого мы можем перестроить этот код, чтобы большую часть времени оставаться в спящем режиме, и мы можем сконфигурировать таймер, который будет пробуждать микроконтроллер каждые 100 мс.
Разрешение другим программным компонентам решать, когда переводить микроконтроллер в спящий режим, может представлять собой другой подход. Как мы увидим в Главе 23, операционная система реального времени может быть запрограммирована на автоматический перевод микроконтроллера в спящий режим, когда ему нечего делать5.
19.2.1. Переход в/выход из спящих режимов
Как было сказано в предыдущем параграфе, ЦПУ переходит в спящий режим исключительно на добровольной основе, используя специальные ассемблерные инструкции ARM. Это означает, что, как программисты, мы несем полную ответственность за энергопотребление разрабатываемых нами устройств6.
Микроконтроллеры на базе Cortex-M предлагают две инструкции для их перевода в спящий режим: WFI и WFE. Инструкция «Ожидание прерывания» (Wait For Interrupt, WFI) также называется безусловной инструкцией перехода в спящий режим. Когда ЦПУ выполняет данную инструкцию, оно немедленно останавливает выполнение ядра. Процессор возобновит работу только по запросу прерывания, в зависимости от приоритета прерывания и действующего уровня сна (подробнее об этом позже), или в случае событий отладки. Если прерывание оказалось отложено (pending), пока микроконтроллер выполнял инструкцию WFI, он переходит в спящий режим и сразу же выходит из него.
«Ожидание события» (Wait For Event, WFE) является другой инструкцией, позволяющей перевести микроконтроллер в спящий режим. Она отличается от WFI тем, что проверяет состояние специального регистра событий7, прежде чем остановить ядро: если этот регистр установлен, WFE сбрасывает его и не приостанавливает ЦПУ, продолжающее выполнение программы (это позволяет нам управлять отложенным событием, если это необходимо). В противном случае она приостанавливает микроконтроллер, пока данный регистр событий снова не будет установлен.
5В данной главе мы обнаружим, что одна из возможных стратегий состоит в переводе микроконтроллера в спящий режим, когда планировщик ставит на выполнение холостой поток. Холостой поток (idle thread)
– это поток, выполняемый ОСРВ, когда все остальные потоки «не выполняются». Он ясно дает понять, что микроконтроллеру ничего существенного делать не надо, и его можно безопасно перевести в спящий режим.
6Понятно, что речь идет об энергопотреблении ядра микроконтроллера и всех интегрированных в него периферийных устройств. Потребляемая энергия всей платы определяется другими «вещами», которые мы не будем здесь рассматривать.
7Этот регистр является внутренним для ядра и недоступен для пользователя.
Управление питанием |
484 |
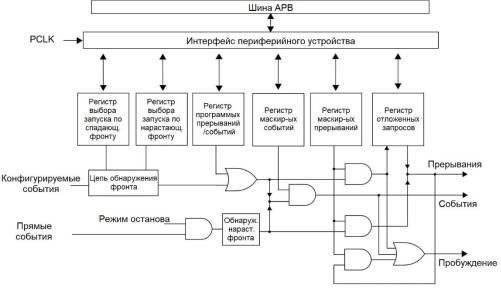
Но в чем именно разница между событием и прерыванием? События являются источником путаницы в мире STM32 (а также в мире Cortex-M в целом). Они выглядят как нечто нематериальное по сравнению с прерываниями, которые мы научились обрабатывать в Главе 7. Прежде чем мы выясним, что такое события, нам нужно лучше объяснить роль контроллера EXTI в микроконтроллере STM32. Расширенный контроллер пре-
рываний и событий (Extended Interrupts and Events Controller, EXTI) – это аппаратный ком-
понент, встроенный в микроконтроллер, который управляет внешними и внутренними асинхронными прерываниями/событиями и генерирует запрос событий для ЦПУ/контроллера NVIC и запрос на пробуждение для контроллера питания (см. рисунок 2). Контроллер EXTI позволяет управлять несколькими линиями событий, которые могут пробудить микроконтроллер из некоторых спящих режимов (не все события могут пробудить микроконтроллер). Линии могут быть конфигурируемыми или прямыми и, следовательно, встроенными в микроконтроллер:
•Линии являются конфигурируемыми: активный фронт может быть выбран независимо, а флаг состояния указывает источник прерывания. Конфигурируемые линии используются внешними прерываниями от вводов/выводов и несколькими периферийными устройствами (подробнее об этом позже).
•Линии являются прямыми и аппаратными: они используются некоторыми пе-
риферийными устройствами для генерации пробуждения от события останова или прерывания. Флаг состояния предоставляется самим периферийным устройством. Например, RTC может использоваться для генерации события для пробуждения микроконтроллера.
Рисунок 2: Как события могут быть использованы для пробуждения ядра
Другим важным аспектом, который необходимо прояснить в отношении контроллеров EXTI и NVIC, является то, что каждая линия может маскироваться независимо для генерации прерываний или событий. Например, в Главе 6 мы видели, что GPIO можно сконфигурировать для работы в режиме GPIO_MODE_EVT_*, который отличается от режима GPIO_MODE_IT_*: в первом случае, когда срабатывает I/O, он не будет генерировать запрос IRQ, но установит флаг события. Это приведет к пробуждению микроконтроллера, если он перешел в режим пониженного энергопотребления при помощи инструкции WFE.


Управление питанием |
486 |
•выполнив WFI, микроконтроллер может быть пробужден разрешенным прерыванием, когда установлен регистр PRIMASK.
19.2.1.1. «Спящий режим по выходу»
Функция «Спящий режим по выходу» (Sleep-On-Exit) полезна для приложений, построенных на прерываниях, где все операции (кроме этапа инициализации) выполняются внутри обработчиков прерываний. Это программируемая функция, которую можно включить или отключить, установив бит регистра SCB->SCR. Когда она включена, ядро Cortex-M автоматически переходит в спящий режим (так же, как и при выполнении инструкции WFI) при выходе из обработчика исключения/прерывания. Функция Sleep-On- Exit должна быть включена в конце этапа инициализации. В противном случае, если событие прерывания произойдет на этапе инициализации, когда функция Sleep-On-Exit уже включена, процессор перейдет в спящий режим, несмотря на то что этап инициализации еще не завершен.
CubeHAL предоставляет две удобные процедуры для включения/отключения этого ре-
жима: HAL_PWR_EnableSleepOnExit() и HAL_PWR_DisableSleepOnExit().
19.2.2.Спящие режимы в микроконтроллерах на базе
Cortex-M
До сих пор мы много говорили о спящем режиме. Это в основном потому, что схема управления питанием, определенная ARM, дополнительно подстраивается производителями интегральных схем, как это делает ST со своими продуктами. Микроконтроллеры на базе Cortex-M архитектурно поддерживают два спящих режима: нормальный спящий режим и глубокий сон. Как мы узнаем позже в данной главе, микроконтроллеры STM32F называют их Спящим (sleep) режимом и режимом Останова (stop) и добавляют третий, еще более глубокий режим, называемый режимом Ожидания (standby). Серия STM32L дополнительно расширяет эти два «основных» режима работы на несколько подрежимов.
И спящий режим, и режим глубокого сна достигаются с помощью инструкций WFI и WFE, которые мы рассмотрели ранее. Единственное отличие состоит в том, что режим глубокого сна достигается установкой бита SLEEPDEEP в 1 в регистре PWR->SCR. Однако нам не нужно разбираться в этих подробностях, поскольку CubeHAL спроектирован для абстрагирования от них.
Обычно микроконтроллеры STM32 спроектированы таким образом, что в спящем режиме отключается только тактирование ЦПУ, в то время как на другие тактовые генераторы или источники аналогового тактового сигнала он не оказывает влияния (это означает, что все включенные периферийные устройства остаются активными). Вместо этого в режиме останова тактирование всех периферийных устройств домена питания 1,8 В (или 1,2 В для новейших микроконтроллеров STM32), отключается, а тактирование домена питания VDD остается включенным9, за исключением HSI-генератора и
9 Как мы увидим далее, микроконтроллер STM32 может питаться от регулируемого источника напряжения в диапазоне от 2,0 до 3,6 В (некоторые из них позволяют питаться даже до 1,7 В). Этот источник напряжения также называется доменом питания VDD, и все компоненты внутри микроконтроллера, питаемые от этого источника, считаются частью домена питания VDD. Тем не менее, внутреннее ядро микроконтроллера и некоторые другие периферийные устройства питаются от встроенного внутреннего регулятора напряжения 1,8 В (или даже 1,0 В в маломощных микроконтроллерах STM32L). Они определяются доменом