

Инструмент STM32CubeMX |
113 |
4.2.2. Создание проекта Eclipse
А сейчас мы создадим проект Eclipse, в котором будут размещаться файлы, сгенериро-
ванные CubeMX.
Перейдите в меню File → New → C Project. Введите название проекта, которое вам нравится, и выберите Hello World ARM Cortex-M C/C++ Project в качестве типа проекта.
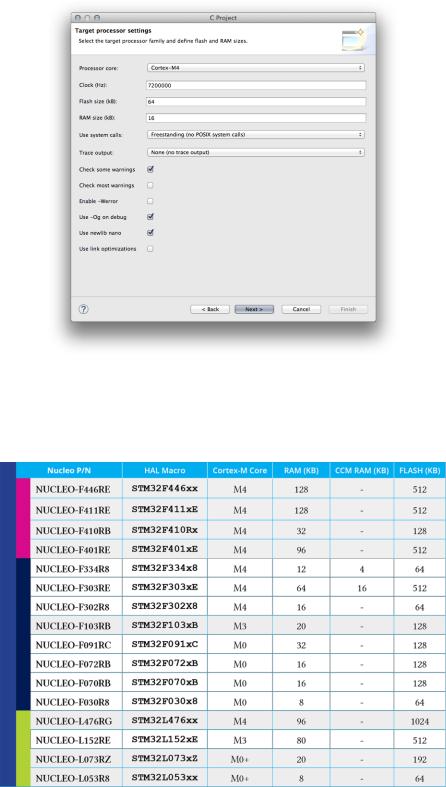
Рисунок 15: Второй шаг мастера генерации проекта
На втором шаге заполните поля Processor core, Clock, Flash size и RAM size в соответствии с типом вашей Nucleo (см. таблицу 2, если вы их не знаете), а все остальные поля оставьте в соответствии с рисунком 15.
Таблица 2: Настройки проекта для выбора в соответствии с имеющейся Nucleo
Инструмент STM32CubeMX |
114 |
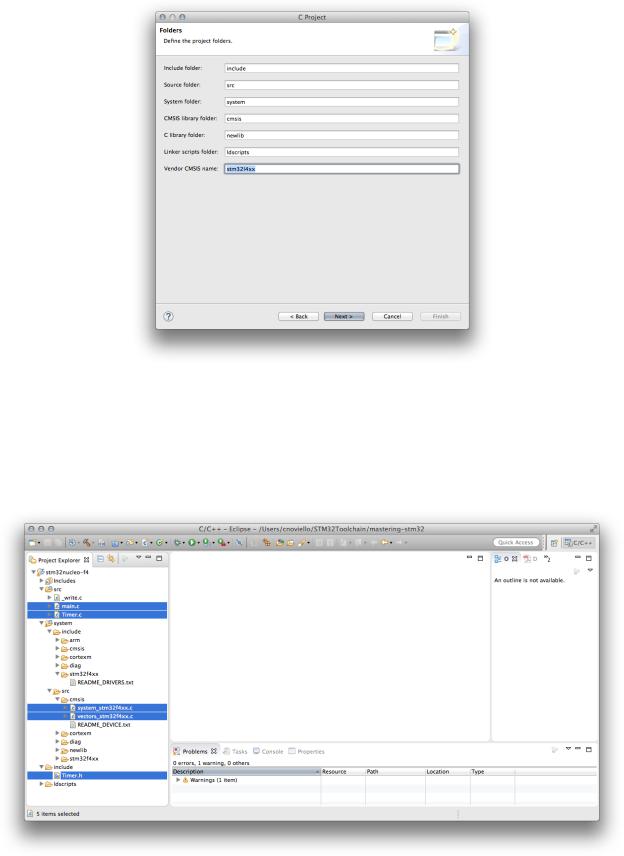
На третьем шаге оставьте все поля по умолчанию, кроме последнего: Vendor CMSIS name. Это поле должно иметь следующий шаблон: stm32<семейство>xx. Например, для Nucleo-F1 впишите stm32f1xx или для Nucleo-L4 впишите stm32l4xx, как показано на рисунке 16. Продолжайте работу с мастером проекта, пока он не будет завершен.
Рисунок 16: Третий шаг мастера генерации проекта
Еще раз, мы использовали плагин Eclipse GNU MCU для генерации проекта, но на этот раз есть некоторые файлы, которые нам не нужны, поскольку мы будем использовать файлы, сгенерированные инструментом CubeMX. На рисунке 17 показан проект Eclipse и пять выделенных файлов в представлении Project Explorer. Вы можете безопасно удалить их, нажав кнопку Delete на клавиатуре.
Рисунок 17: Проект Eclipse с выделенными файлами для удаления

Инструмент STM32CubeMX |
115 |
Нам нужно изменить еще кое-что в файлах, сгенерированных плагином GNU MCU. Открыв файл ldscripts/mem.ld, мы увидим, что начальный адрес (origin) Flash-памяти неправильный, потому что, как мы видели в Главе 1, Flash-память отображается с адреса 0x0800 0000 для всех устройств STM32. Итак, убедитесь, что определения начального адреса памяти11 вашего файла .ld равны следующим:
...
MEMORY
{
FLASH (rx) : ORIGIN = 0x08000000, LENGTH = 512K RAM (xrw) : ORIGIN = 0x20000000, LENGTH = 96K
...
4.2.3.Ручное импортирование сгенерированных файлов в проект Eclipse
После того, как мы создали проект Eclipse, нам нужно импортировать в него проект CubeMX. Существует два способа сделать это: вручную или с помощью удобного инструмента, созданного автором данной книги. Настоятельно рекомендуется выполнить представленные операции вручную хотя бы один раз, чтобы точно понять, какие программные компоненты участвуют в каждой операции.
Начиная с этого момента все представленные пути указаны относительно папки
/STM32Toolchain/cubemx-out/<название-проекта>.
Перейдите в папку Inc в файловой системе и перетащите все ее содержимое в папку include в Eclipse. Eclipse спросит вас, каким образом импортировать файлы. Выберите параметр Copy files и нажмите кнопку ОК. Таким же образом перейдите в папку Src в файловой системе и перетащите все ее содержимое в папку src в Eclipse. С помощью двух данных операций мы импортировали код приложения в проект Eclipse.
Начиная с этого момента, вы найдете несколько путей и имен файлов, относящихся к микроконтроллерам F4. Например, путь с такой структурой
‘Drivers/STM32F4xx_HAL_Driver/Inc’ или имя файла, подобное этому
‘system_stm32f4xx.c’. Прошу отметить, что вы должны заменить F4 семейством STM32 вашего микроконтроллера (F0, F1, F2, F3, F7, L0, L1, L4). Обра-
тите внимание на заглавную букву (F4) или строчную (f4) в пути или имени файла.
Примите также к сведению, что начиная с этого параграфа мы будем использовать шрифт Courier для указания путей файловой системы (например,
Drivers/STM32F4xx_HAL_Driver/Inc); а папки Eclipse мы будем указывать жирным
шрифтом (например, system/include/stm32f4xx). Это соглашение действует во всей книге.
11 Очевидно, что объем памяти зависит от конкретного микроконтроллера. Всегда дважды проверяйте, соответствует ли он аппаратным спецификациям вашего микроконтроллера. Если он не совпадает, при запуске могут возникать странные ошибки (мы узнаем, как бороться с аппаратными ошибками в следующей главе). CubeMX предоставляет нам еще одно быстрое решение. Открыв папку
/STM32Toolchain/cubemx-out/<название-проекта>/SW4STM32/<название-проекта> Configuration, вы найдете файл,
заканчивающийся на .ld. Это скрипт компоновщика, содержащий правильные определения начального адреса памяти для вашего микроконтроллера. Вы можете просто скопировать секцию MEMORY, содержащуюся в данном файле, и вставить ее в файл ldscripts/mem.ld.

Инструмент STM32CubeMX |
116 |
Теперь перейдите в папку файловой системы Drivers/STM32F4xx_HAL_Driver/Inc и импортируйте все ее содержимое в папку Eclipse system/include/stm32f4xx. Таким же образом перейдите в папку файловой системы Drivers/STM32F4xx_HAL_Driver/Src и импортируйте все ее содержимое в папку Eclipse system/src/stm32f4xx. Мы успешно импортировали HAL от ST в наш проект. Теперь очередь за пакетом CMSIS-CORE.
Сначала мы начнем импортировать официальный пакет CMSIS-CORE. Перейдите в папку файловой системы Drivers/CMSIS/Include и перетащите все ее содержимое в папку Eclipse system/include/cmsis. Когда Eclipse спросит вас, ответьте Yes, чтобы заменить существующие файлы.
Теперь нам нужно импортировать файлы конкретного устройства для CMSIS-CORE.
Обратите внимание, что плагин GNU MCU уже встраивает CMSIS-CORE в сгенерированный проект, но он старой версии (3.20). Мы заменяем его последней официальной версией, поставляемой ST (4.30 на момент написания данной главы).
Перейдите в папку файловой системы Drivers/CMSIS/Device/ST/STM32F4xx/Include и
перетащите все ее содержимое в папку Eclipse system/include/cmsis. Eclipse попросит вас перезаписать существующие файлы: ответьте Yes. Теперь перейдите в папку startup и перетащите файл startup_stm32f4xxxx.s в папку Eclipse system/src/cmsis.
Прочитайте внимательно
Файлы .s – это ассемблерные файлы, которые должны обрабатываться непосредственно ассемблером GNU Assembler (AS). Однако Eclipse CDT запрограммирован так, чтобы ожидать, что ассемблерный файл заканчивается на .S (заглавная S). Поэтому переименуйте файл startup_stm32f4xxxx.s в startup_stm32f4xxxx.S. Для этого щелкните правой кнопкой мыши по файлу в Eclipse и выберите пункт Rename.
Итак, давайте вспомним, что мы сделали до сих пор.
1.Сначала мы создали пустой проект ARM C/C++, используя технические характеристики нашего микроконтроллера.
2.Затем мы удалили некоторые файлы, сгенерированные плагином GNU MCU, и импортировали файлы, сгенерированные CubeMX; мы также обновили начальный адрес FLASH в файле mem.ld.
3.Затем мы скопировали основные файлы приложения из папок Inc и Src.
4.Мы импортировали HAL от ST для нашего микроконтроллера и новейший пакет
CMSIS-CORE.
5.Наконец, мы добавили правильный ассемблерный startup-файл startup_stm32f4xxxx.s для нашего микроконтроллера и переименовали его в startup_stm32f4xxxx.S (заканчивающийся на заглавную .S).
Втаблице 3 приведены файлы и папки, которые необходимо импортировать в проект Eclipse. Пути слева являются путями файловой системы (относительно каталога сгенерированного проекта CubeMX); пути справа – это соответствующая папка Eclipse.
Инструмент STM32CubeMX |
117 |
Таблица 3: Файлы и папки, которые необходимо импортировать в соответствующие папки Eclipse
Пути и файлы файловой системы |
Папки Eclipse |
Inc |
include |
Src |
src |
Drivers/STM32F4xx_HAL_Driver/Inc |
system/include/stm32f4xx |
Drivers/STM32F4xx_HAL_Driver/Src |
system/src/stm32f4xx |
Drivers/CMSIS/Include |
system/include/cmsis |
Drivers/CMSIS/Device/ST/STM32F4xx/Include |
system/include/cmsis |
startup/startup_stm32f4xxxx.S |
system/src/cmsis |
Я понимаю, что данные процедуры кажутся громоздкими, но, поверьте мне: как только вы ознакомитесь с этими процедурами, вы сможете создать проект для каждого микроконтроллера STM32, включая новейшие микроконтроллеры STM32F7 и будущие STM32. Однако в следующем параграфе мы рассмотрим способ автоматизации данной задачи.
Если вы попытаетесь скомпилировать проект, вы увидите много ошибок и предупреждений. Чтобы завершить его настройку, нам нужно еще два шага.
HAL от ST предназначен для работы со всеми микроконтроллерами имеющихся серий (F0, F1 и т. д.). Внутри HAL используются несколько условных макросов для распознавания типа микроконтроллера. Таким образом, мы должны указать микроконтроллер, оснащающий нашу Nucleo.
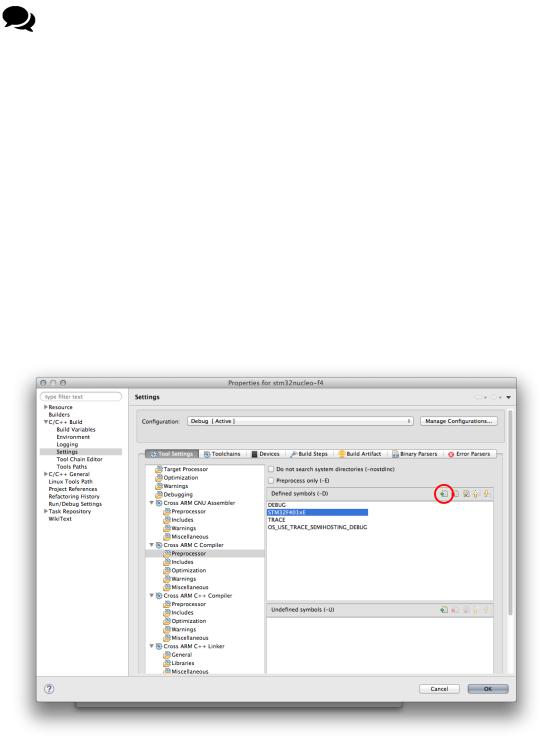
Перейдите в меню Project → Properties, а затем в раздел C/C++ Build → Settings. Выберите раздел Cross ARM C Compiler → Preprocessor, а затем щелкните значок Add… (значок, обведенный красным на рисунке 18). Введите имя макроса, соответствующее вашей Nucleo (см. таблицу 2, столбец HAL Macro). Например, для Nucleo-F401RE используйте макрос STM32F401xE.
Рисунок 18: Настройки проекта Eclipse и определение макроса микроконтроллера

Инструмент STM32CubeMX |
118 |
Если вы используете пользовательскую плату с микроконтроллером, которого нет в таблице 2, вы можете найти макрос для вашего микроконтроллера в файле system/include/cmsis/stm32XXxx.h.
Последний шаг – удалить следующие файлы из проекта Eclipse12:
•system/src/stm32XXxx/stm32XXx_hal_msp_template.c
•system/src/stm32XXxx/stm32XXxx_hal_timebase_tim_template.c
•system/src/stm32XXxx/stm32XXxx_hal_timebase_rtc_alarm_template.c:
Эти файлы являются шаблонами, сгенерированными CubeMX в папке system/stm32XXxx (я считаю, что CubeMX не должен помещать данные файлы в сгенерированный проект). Мы проанализируем их позже в книге.
Поздравляю: теперь вы готовы к компиляции проекта. Если все прошло успешно, проект должен скомпилировать генерируемый бинарный файл без ошибок (некоторые предупреждения все еще есть, но не беспокойтесь о них).
12 Некоторые из этих файлов все еще отсутствуют в нескольких CubeHAL – если вы не можете найти их, не беспокойтесь об этом. Если вы найдете другие файлы, заканчивающиеся на template.c, удалите их.
Инструмент STM32CubeMX |
119 |
Интермеццо Eclipse
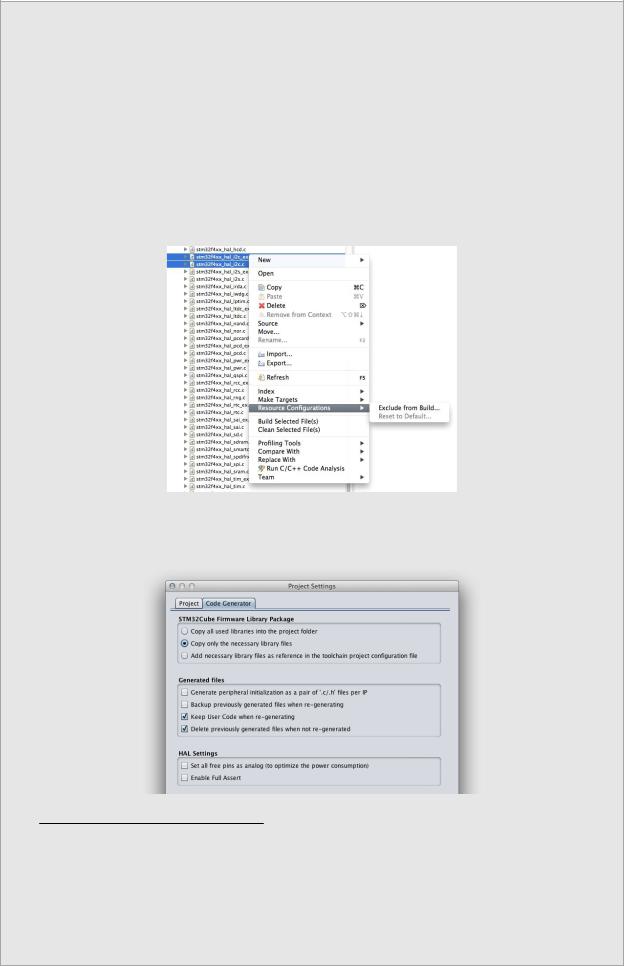
Вы могли заметить, что каждый раз, когда вы меняете что-то в настройках проекта, требуется много времени для компиляции всего дерева файлов с исходным кодом. Это происходит потому, что Eclipse перекомпилирует все файлы с исходным кодом HAL, содержащиеся в system/src/stm32XXxx/. Это действительно раздражает, и вы можете ускорить время компиляции, отключив все те файлы, которые не нужны вашему приложению. Например, если вашей плате не нужно использовать устройства I²C, вы можете безопасно отключить компиляцию файлов stm32XXxx_hal_i2c_ex.c и stm32XXxx_hal_i2c.c, щелкнув по ним правой кнопкой мыши, а затем выбрав
Resource configuration → Exclude from build и выбрав все определенные конфи-
гурации проектаa.
Другое решение этой же проблемы – настроить CubeMX так, чтобы он добавлял в проект только необходимые библиотечные файлы. Для этого в настройках проекта
CubeMX выберите Copy only the necessary library files, как показано нижеb.
aОднако имейте в виду, что исключение неиспользуемых файлов HAL из компиляции не повлияет на размер бинарного файла: любой современный компоновщик может автоматически исключить из генерации абсолютного файла (бинарный файл, который мы загрузим на нашу плату) все эти перемещаемые файлы, содержащие неиспользуемый код и данные (подробнее о процессе компоновки бинарного файла STM32 в Главе 20).
bЭто приведет к тому, что если позже вам потребуется использовать дополнительное периферийное устройство, вам придется импортировать соответствующие файлы HAL вручную.
Инструмент STM32CubeMX |
120 |
4.2.4.Автоматический импорт файлов, созданных с помощью
CubeMX, в проект Eclipse
Предыдущие шаги могут быть выполнены автоматически с использованием простого Python-скрипта. Его название – CubeMXImporter, и его можно скачать с авторского аккаунта на github13.
Прочитайте внимательно
Инструмент автоматически удаляет все ненужные существующие файлы проекта. Среди них также файл main.c и все другие файлы, содержащиеся в папках Eclipse src и include. По этой причине не выполняйте CubeMXImporter в существующем проекте. Всегда выполняйте его в новом проекте Eclipse, сгенерированном с помощью плагина Eclipse GNU MCU.
Данный скрипт работает хорошо, только если вы сгенерировали проект CubeMX для инструментария SW4STM32 (он же AC6).
CubeMXImporter использует Python 2.7.x и библиотеку lxml. Здесь вы можете найти инструкции по установке для Windows, Linux и Mac OSX.
Windows
В Windows мы должны сначала установить последнюю версию Python 2.7. Мы можем скачать ее прямо по этой ссылке14. После загрузки запустите установщик и убедитесь, что все параметры установки включены, как показано на рисунке 19. После завершения установки вы можете установить предварительно скомпилированный пакет lxml, загрузив его отсюда15.
Linux и MacOS X
В этих двух операционных системах Python 2.7 установлен по умолчанию. Итак, нам нужно только установить библиотеку lxml (если она еще не установлена). Мы можем просто установить ее с помощью команды pip:
$ sudo pip install lxml
13https://github.com/cnoviello/CubeMXImporter
14https://www.python.org/ftp/python/2.7.10/python-2.7.10.msi
15https://pypi.python.org/packages/2.7/l/lxml/lxml-3.5.0.win32- py2.7.exe#md5=3fb7a9fb71b7d0f53881291614bd323c