


Продвинутые методы отладки |
689 |
24.4. Внешние отладчики
Серьезные проекты требуют серьезных инструментов. И это горькая правда при разработке электроники. Если вы достигли этой части книги, не пропустив ни одной фундаментальной главы, то вы уже знаете ограничения интерфейса отладки ST-LINK.
К сожалению, ST-LINK работает медленнее, чем специальные внешние отладчики. В нем отсутствуют некоторые важные функции, и на него влияют серьезные ошибки, которые часто превращают опыт отладки в настоящий кошмар. Более того, поддержка OpenOCD для интерфейса ST-LINK по-прежнему неполна, и некоторые устройства STM32 (особенно устройства, принадлежащие к серии STM32L) вообще не поддерживаются. Наконец, разработка OpenOCD протекает слишком медленно: последний стабильный выпуск OpenOCD (0.9) датируется маем 2015 года, и на момент написания данной главы (ноябрь 2016 года) следующий стабильный выпуск (0.10) все еще находился в стадии разработки.
Рисунок 19: Отладчик SEGGER J-Link Ultra+
SEGGER – немецкая компания, специализирующаяся на разработке внешних отладчиков для портфолио ARM Cortex (включая микропроцессоры Cortex-M/R/A и другие современные микроконтроллеры, такие как серии PIC32 и Renesas RX). Отладчики SEGGER J-Link (см. рисунок 19) – это наиболее распространенная на сегодняшний день линия отладчиков, и они часто продаются как OEM-версии для других производителей (отладчики IAR и Keil – не что иное, как J-Link).
Наиболее важные функции, предлагаемые отладчиками J-Link:
•Скорость загрузки до 3 МБайт/с.
•Совместим со всеми популярными инструментариями, включая используемый нами GNU MCU Eclipse.
•Поддерживает неограниченное количество программных точек останова во Flashпамяти.
•Позволяет устанавливать точки останова во внешней Flash-памяти систем Cortex- M через контроллер FMC.

Продвинутые методы отладки |
690 |
•Кроссплатформенная поддержка (Microsoft Windows, Linux, Mac OS X).
•Поддерживает одновременный (concurrent) доступ к процессору несколькими приложениями.
•Поддержка многоядерной отладки.
•Включает в себя удаленный сервер. Позволяет использовать J-Link удаленно через
TCP/IP.
•Программное обеспечение поставляется с бесплатным GDB сервером, что позволяет использовать J-Link со всеми отладочными решениями на базе GDB.
•Доступно программное обеспечение для программирования Flash-памяти при продакшине (J-Flash).
•Независимая от отладчика загрузка во Flash-память (внутренняя Flash-память, CFI Flash, SPIFI Flash).
•Поддержка внутреннего буфера трассировки CPU/MCU (ETB, MTB и т. д.).
•Поддержка трассировки ETM (J-Trace Cortex-M, J-Trace ARM).
•Широкий диапазон напряжения целевого микроконтроллера: 1,2 В – 3,3 В, толерантность к 5 В.
•Поддерживает несколько целевых интерфейсов (JTAG, SWD, FINE, SPD и т. д.).
Отладчики J-Link варьируются от образовательного выпуска, который стоит около 60 долларов, до выпуска J-Trace PRO, который стоит около 1300 долларов. Если вы студент или малобюджетный любитель, стоит потратиться на образовательный выпуск, поскольку он поддерживает все соответствующие функции, предоставляемые профессиональными отладчиками J-Link. Если вы профессионал, то, по мнению автора книги, версия Ultra+ – отличный выбор.
Однако для владельцев отладочных плат STM (Nucleo, Discovery, Eval) есть хорошая и абсолютно бесплатная альтернатива: в апреле 2016 года SEGGER выпустила обновление микропрограммного обеспечения для интерфейса ST-LINK, которое преобразует его в совместимый с J-Link отладчик. Загрузив12 специальный программный инструмент13, ваш ST-LINK преобразуется в интерфейс, совместимый с J-Link OB, и вы можете использовать самые важные программные инструменты от SEGGER14. Более того, вы можете легко вернуть интерфейс ST-LINK, если хотите.
При отладке с помощью отладчика SEGGER нет необходимости использовать OpenOCD, поскольку SEGGER предоставляет собственный совместимый с GDB сервер, называемый JLinkGDBServer. Это одна из основных причин выбора данных инструментов, поскольку JLinkGDBServer является гораздо более быстрой и в то же время надежной альтернативой кроссплатформенного OpenOCD.
Инструкции по обновлению интерфейса ST-LINK до интерфейса, совместимого с J-Link, приведены на веб-сайте SEGGER. Мы не будем повторять их здесь. Вместо этого сейчас мы собираемся проанализировать, как использовать отладчик J-Link с инструментарием
GNU MCU Eclipse.
12https://www.segger.com/jlink-st-link.html
13К сожалению, на момент написания данной главы инструмент обновления был доступен только для ОС
Windows.
14Обратите внимание, что лицензия этого «бесплатного» обновления интерфейса ST-LINK не позволяет использовать его для отладки заказных и коммерческих устройств. Посетите веб-сайт SEGGER для получения полного перечня ограничений.
Продвинутые методы отладки |
692 |
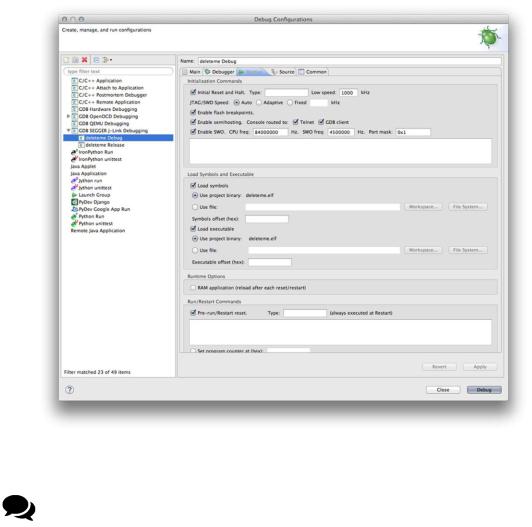
Инструментарий GNU MCU Eclipse нативно поддерживает создание конфигураций отладки для отладчика J-Link. Чтобы создать новую конфигурацию для текущего проекта, перейдите в меню Run → Debug Configurations…. Выделите пункт GDB SEGGER J-Link Debugging в списке слева и нажмите на значок New.
Рисунок 21: Вкладка Debugger в конфигурации J-Link Debug
Вкладки Main, Source и Common идентичны тем, которые находятся в конфигурации отладки GDB OpenOCD Debugging, и мы не будем их здесь описывать (см. Главу 5). Вкладка Debugger, показанная на рисунке 21, содержит параметры конфигурации, относящиеся к интерфейсу отладки и конкретному отлаживаемому микроконтроллеру STM32. Давайте рассмотрим наиболее важные поля в этой вкладке.
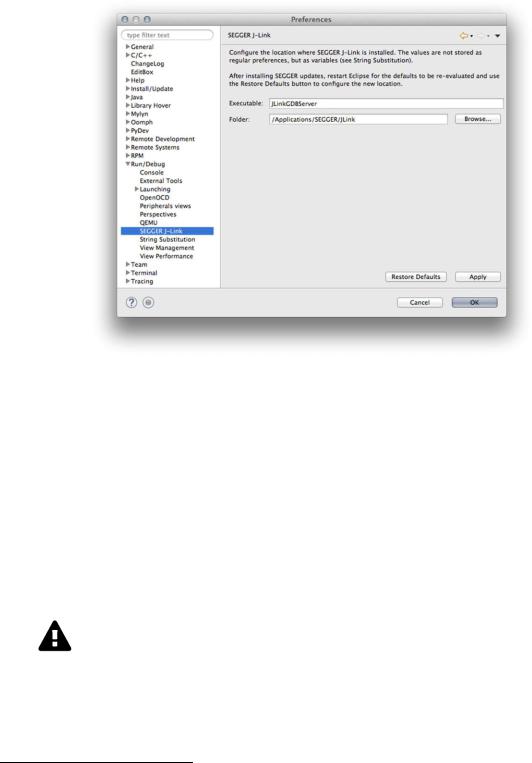
•Executable (Исполняемый файл): это шаблон, который будет заменен полным путем к исполняемому файлу JLinkGDBServer. Настоятельно рекомендуется оставить все как есть....
•Device name (Имя устройства): соответствует имени устройства целевого микроконтроллера. Это значение не может быть произвольным, и оно должно соответствовать точному типу устройства. Например, для Nucleo-F401RE вы должны вписать STM32F401RE. Если вы уже установили пакеты Keil Packs для микроконтроллеров STM32 и правильно связали подходящий идентификатор устройства в настройках проекта, это поле будет заполнено автоматически.
•Endianness (Порядок следования байт): соответствует порядку байтов в памяти, и для каждого процессора на базе Cortex-M его нужно установить на Little.
•Connection (Подключение): для USB-отладчика J-Link выберите USB. Если у вас есть J-Link с портом Ethernet, запишите IP-адрес, соответствующий отладчику
J-Link.
Продвинутые методы отладки |
693 |
•Interface (Интерфейс): микроконтроллеры STM32 можно отлаживать через классический интерфейс JTAG или SWD. Если вы используете отладочную плату от ST со встроенным интерфейсом ST-LINK, выберите пункт SWD.
Остальные параметры конфигурации во вкладке Debugger можно оставить как есть.
Рисунок 22: Вкладка Startup в конфигурации отладки J-Link Debug
Различия между интерфейсами JTAG и SWD
Начинающие пользователи, как правило, смущены этими двумя стандартами отладки, которые поддерживаются микроконтроллерами STM32. Объединённая рабочая группа по автоматизации тестирования (Joint Test Action Group, JTAG)
– это стандарт, который определяет как сигнальные характеристики, так и спецификацию протокола данных. Он основан на пяти сигналах плюс два дополнительных провода, используемых для определения напряжения целевого устройства VDD и GND. JTAG позволяет подключать внешние отладчики к микроконтроллерам. Это достаточно распространенный принятый стандарт в электронной промышленности.
Отладка по последовательному проводу (Serial Wire Debug, SWD) – это альтерна-
тивный фирменный 2-выводной электрический интерфейс ARM, использующий тот же протокол JTAG. SWD позволяет отладчику стать другим ведущим устройством шины AMBA для доступа к системной памяти и периферийным устройствам или регистрам отладки. Скорость передачи данных составляет до 4 МБайт/с при 50 МГц. SWD также имеет встроенное обнаружение ошибок. На устройствах JTAG с совместимостью с SWD выводы TMS и TCK используются в качестве сигналов SWDIO и SWCLK для двухрежимного программирования. Дополнительный и необязательный сигнал, называемый выходом отладки по