

- •Оглавление
- •Предисловие
- •Почему я написал книгу?
- •Для кого эта книга?
- •Как использовать эту книгу?
- •Как организована книга?
- •Об авторе
- •Ошибки и предложения
- •Поддержка книги
- •Как помочь автору
- •Отказ от авторского права
- •Благодарность за участие
- •Перевод
- •Благодарности
- •I Введение
- •1. Введение в ассортимент микроконтроллеров STM32
- •1.1. Введение в процессоры на базе ARM
- •1.1.1. Cortex и процессоры на базе Cortex-M
- •1.1.1.10. Внедренные функции Cortex-M в ассортименте STM32
- •1.2. Введение в микроконтроллеры STM32
- •1.2.1. Преимущества ассортимента STM32….
- •1.2.2. ….И его недостатки
- •1.3. Краткий обзор подсемейств STM32
- •1.3.1. Серия F0
- •1.3.2. Серия F1
- •1.3.3. Серия F2
- •1.3.4. Серия F3
- •1.3.5. Серия F4
- •1.3.6. Серия F7
- •1.3.7. Серия H7
- •1.3.8. Серия L0
- •1.3.9. Серия L1
- •1.3.10. Серия L4
- •1.3.11. Серия L4+
- •1.3.12. Серия STM32WB
- •1.3.13. Как правильно выбрать для себя микроконтроллер?
- •1.4. Отладочная плата Nucleo
- •2. Установка инструментария
- •2.1. Почему выбирают Eclipse/GCC в качестве инструментария для STM32
- •2.1.1. Два слова о Eclipse…
- •2.2. Windows – Установка инструментария
- •2.2.1. Windows – Установка Eclipse
- •2.2.2. Windows – Установка плагинов Eclipse
- •2.2.3. Windows – Установка GCC ARM Embedded
- •2.2.4. Windows – Установка инструментов сборки
- •2.2.5. Windows – Установка OpenOCD
- •2.2.6. Windows – Установка инструментов ST и драйверов
- •2.3. Linux – Установка инструментария
- •2.3.2. Linux – Установка Java
- •2.3.3. Linux – Установка Eclipse
- •2.3.4. Linux – Установка плагинов Eclipse
- •2.3.5. Linux – Установка GCC ARM Embedded
- •2.3.6. Linux – Установка драйверов Nucleo
- •2.3.7. Linux – Установка OpenOCD
- •2.3.8. Linux – Установка инструментов ST
- •2.4. Mac – Установка инструментария
- •2.4.1. Mac – Установка Eclipse
- •2.4.2. Mac – Установка плагинов Eclipse
- •2.4.3. Mac – Установка GCC ARM Embedded
- •2.4.4. Mac – Установка драйверов Nucleo
- •2.4.5. Mac – Установка OpenOCD
- •2.4.6. Mac – Установка инструментов ST
- •3. Hello, Nucleo!
- •3.1. Прикоснитесь к Eclipse IDE
- •3.2. Создание проекта
- •3.3. Подключение Nucleo к ПК
- •3.5. Изучение сгенерированного кода
- •4. Инструмент STM32CubeMX
- •4.1. Введение в инструмент CubeMX
- •4.1.1. Представление Pinout
- •4.1.2. Представление Clock Configuration
- •4.1.3. Представление Configuration
- •4.1.4. Представление Power Consumption Calculator
- •4.2. Генерация проекта
- •4.2.1. Генерация проекта Си при помощи CubeMX
- •4.2.2. Создание проекта Eclipse
- •4.2.3. Ручное импортирование сгенерированных файлов в проект Eclipse
- •4.3. Изучение сгенерированного кода приложения
- •4.3.1. Добавим что-нибудь полезное в микропрограмму
- •4.4. Загрузка исходного кода примеров книги
- •5. Введение в отладку
- •5.1. Начало работы с OpenOCD
- •5.1.1. Запуск OpenOCD
- •5.1.2. Подключение к OpenOCD Telnet Console
- •5.1.3. Настройка Eclipse
- •5.1.4. Отладка в Eclipse
- •5.2. Полухостинг ARM
- •5.2.1. Включение полухостинга в новом проекте
- •5.2.2. Включение полуохостинга в существующем проекте
- •5.2.3. Недостатки полухостинга
- •5.2.4. Как работает полухостинг
- •II Погружение в HAL
- •6. Управление GPIO
- •6.2. Конфигурация GPIO
- •6.2.1. Режимы работы GPIO
- •6.2.2. Режим альтернативной функции GPIO
- •6.2.3. Понятие скорости GPIO
- •6.3. Управление GPIO
- •6.4. Деинициализация GPIO
- •7. Обработка прерываний
- •7.1. Контроллер NVIC
- •7.1.1. Таблица векторов в STM32
- •7.2. Разрешение прерываний
- •7.2.1. Линии запроса внешних прерываний и контроллер NVIC
- •7.2.2. Разрешение прерываний в CubeMX
- •7.3. Жизненный цикл прерываний
- •7.4. Уровни приоритета прерываний
- •7.4.1. Cortex-M0/0+
- •7.4.2. Cortex-M3/4/7
- •7.4.3. Установка уровня прерываний в CubeMX
- •7.5. Реентерабельность прерываний
- •8. Универсальные асинхронные последовательные средства связи
- •8.1. Введение в UART и USART
- •8.2. Инициализация UART
- •8.3. UART-связь в режиме опроса
- •8.3.1. Установка консоли последовательного порта в Windows
- •8.3.2. Установка консоли последовательного порта в Linux и MacOS X
- •8.4. UART-связь в режиме прерываний
- •8.5. Обработка ошибок
- •8.6. Перенаправление ввода-вывода
- •9. Управление DMA
- •9.1. Введение в DMA
- •9.1.1. Необходимость DMA и роль внутренних шин
- •9.1.2. Контроллер DMA
- •9.2. Модуль HAL_DMA
- •9.2.1. DMA_HandleTypeDef в HAL для F0/F1/F3/L0/L1/L4
- •9.2.2. DMA_HandleTypeDef в HAL для F2/F4/F7
- •9.2.3. DMA_HandleTypeDef в HAL для L0/L4
- •9.2.4. Как выполнять передачи в режиме опроса
- •9.2.5. Как выполнять передачи в режиме прерываний
- •9.2.8. Разнообразные функции модулей HAL_DMA и HAL_DMA_Ex
- •9.3. Использование CubeMX для конфигурации запросов к DMA
- •10. Схема тактирования
- •10.1. Распределение тактового сигнала
- •10.1.1. Обзор схемы тактирования STM32
- •10.1.1.1. Многочастотный внутренний RC-генератор в семействах STM32L
- •10.1.3.1. Подача тактового сигнала от высокочастотного генератора
- •10.1.3.2. Подача тактового сигнала от 32кГц генератора
- •10.2. Обзор модуля HAL_RCC
- •10.2.1. Вычисление тактовой частоты во время выполнения
- •10.2.2. Разрешение Выхода синхронизации
- •10.2.3. Разрешение Системы защиты тактирования
- •10.3. Калибровка HSI-генератора
- •11. Таймеры
- •11.1. Введение в таймеры
- •11.1.1. Категории таймеров в микроконтроллере STM32
- •11.1.2. Доступность таймеров в ассортименте STM32
- •11.2. Базовые таймеры
- •11.2.1. Использование таймеров в режиме прерываний
- •11.2.2. Использование таймеров в режиме опроса
- •11.2.3. Использование таймеров в режиме DMA
- •11.2.4. Остановка таймера
- •11.3. Таймеры общего назначения
- •11.3.1.1. Режим внешнего тактирования 2
- •11.3.1.2. Режим внешнего тактирования 1
- •11.3.2. Режимы синхронизации ведущего/ведомого таймеров
- •11.3.2.1. Разрешение прерываний, относящихся к триггерной цепи
- •11.3.2.2. Использование CubeMX для конфигурации синхронизации ведущего/ведомого устройств
- •11.3.3. Программная генерация связанных с таймером событий
- •11.3.4. Режимы отсчета
- •11.3.5. Режим захвата входного сигнала
- •11.3.5.1. Использование CubeMX для конфигурации режима захвата входного сигнала
- •11.3.6. Режим сравнения выходного сигнала
- •11.3.6.1. Использование CubeMX для конфигурации режима сравнения выходного сигнала
- •11.3.7. Генерация широтно-импульсного сигнала
- •11.3.7.1. Генерация синусоидального сигнала при помощи ШИМ
- •11.3.7.2. Использование CubeMX для конфигурации режима ШИМ
- •11.3.8. Одноимпульсный режим
- •11.3.8.1. Использование CubeMX для конфигурации одноимпульсного режима
- •11.3.9. Режим энкодера
- •11.3.9.1. Использование CubeMX для конфигурации режима энкодера
- •11.3.10.1. Режим датчика Холла
- •11.3.10.2. Комбинированный режим трехфазной ШИМ и другие функции управления двигателем
- •11.3.10.3. Вход сброса таймера и блокировка регистров таймера
- •11.3.10.4. Предварительная загрузка регистра автоперезагрузки
- •11.3.11. Отладка и таймеры
- •11.4. Системный таймер SysTick
- •12. Аналого-цифровое преобразование
- •12.1. Введение в АЦП последовательного приближения
- •12.2. Модуль HAL_ADC
- •12.2.1. Режимы преобразования
- •12.2.1.1. Режим однократного преобразования одного канала
- •12.2.1.2. Режим сканирования с однократным преобразованием
- •12.2.1.3. Режим непрерывного преобразования одного канала
- •12.2.1.4. Режим сканирования с непрерывным преобразованием
- •12.2.1.5. Режим преобразования инжектированных каналов
- •12.2.1.6. Парный режим
- •12.2.2. Выбор канала
- •12.2.3. Разрядность АЦП и скорость преобразования
- •12.2.4. Аналого-цифровые преобразования в режиме опроса
- •12.2.6. Аналого-цифровые преобразования в режиме DMA
- •12.2.6.1. Многократное преобразование одного канала в режиме DMA
- •12.2.6.3. Непрерывные преобразования в режиме DMA
- •12.2.7. Обработка ошибок
- •12.2.8. Преобразования, управляемые таймером
- •12.2.9. Преобразования, управляемые внешними событиями
- •12.2.10. Калибровка АЦП
- •12.3. Использование CubeMX для конфигурации АЦП
- •13.1. Введение в периферийное устройство ЦАП
- •13.2. Модуль HAL_DAC
- •13.2.1. Управление ЦАП вручную
- •13.2.2. Управление ЦАП в режиме DMA с использованием таймера
- •13.2.3. Генерация треугольного сигнала
- •13.2.4. Генерация шумового сигнала
- •14.1. Введение в спецификацию I²C
- •14.1.1. Протокол I²C
- •14.1.1.1. START- и STOP-условия
- •14.1.1.2. Формат байта
- •14.1.1.3. Кадр адреса
- •14.1.1.4. Биты «Подтверждено» (ACK) и «Не подтверждено» (NACK)
- •14.1.1.5. Кадры данных
- •14.1.1.6. Комбинированные транзакции
- •14.1.1.7. Удержание синхросигнала
- •14.1.2. Наличие периферийных устройств I²C в микроконтроллерах STM32
- •14.2. Модуль HAL_I2C
- •14.2.1.1. Операции I/O MEM
- •14.2.1.2. Комбинированные транзакции
- •14.3. Использование CubeMX для конфигурации периферийного устройства I²C
- •15.1. Введение в спецификацию SPI
- •15.1.1. Полярность и фаза тактового сигнала
- •15.1.2. Управление сигналом Slave Select
- •15.1.3. Режим TI периферийного устройства SPI
- •15.1.4. Наличие периферийных устройств SPI в микроконтроллерах STM32
- •15.2. Модуль HAL_SPI
- •15.2.1. Обмен сообщениями с использованием периферийного устройства SPI
- •15.2.2. Максимальная частота передачи, достижимая при использовании CubeHAL
- •15.3. Использование CubeMX для конфигурации периферийного устройства SPI
- •16. Циклический контроль избыточности
- •16.1. Введение в расчет CRC
- •16.1.1. Расчет CRC в микроконтроллерах STM32F1/F2/F4/L1
- •16.2. Модуль HAL_CRC
- •17. Независимый и оконный сторожевые таймеры
- •17.1. Независимый сторожевой таймер
- •17.1.1. Использование CubeHAL для программирования таймера IWDG
- •17.2. Системный оконный сторожевой таймер
- •17.2.1. Использование CubeHAL для программирования таймера WWDG
- •17.3. Отслеживание системного сброса, вызванного сторожевым таймером
- •17.4. Заморозка сторожевых таймеров во время сеанса отладки
- •17.5. Выбор сторожевого таймера, подходящего для вашего приложения
- •18. Часы реального времени
- •18.1. Введение в периферийное устройство RTC
- •18.2. Модуль HAL_RTC
- •18.2.1. Установка и получение текущей даты/времени
- •18.2.1.1. Правильный способ чтения значений даты/времени
- •18.2.2. Конфигурирование будильников
- •18.2.3. Блок периодического пробуждения
- •18.2.5. Калибровка RTC
- •18.2.5.1. Грубая калибровка RTC
- •18.2.5.2. Тонкая калибровка RTC
- •18.2.5.3. Обнаружение опорного тактового сигнала
- •18.3. Использование резервной SRAM
- •III Дополнительные темы
- •19. Управление питанием
- •19.1. Управление питанием в микроконтроллерах на базе Cortex-M
- •19.2. Как микроконтроллеры Cortex-M управляют рабочим и спящим режимами
- •19.2.1. Переход в/выход из спящих режимов
- •19.2.1.1. «Спящий режим по выходу»
- •19.3. Управление питанием в микроконтроллерах STM32F
- •19.3.1. Источники питания
- •19.3.2. Режимы питания
- •19.3.2.1. Рабочий режим
- •19.3.2.2. Спящий режим
- •19.3.2.3. Режим останова
- •19.3.2.4. Режим ожидания
- •19.3.2.5. Пример работы в режимах пониженного энергопотребления
- •19.4. Управление питанием в микроконтроллерах STM32L
- •19.4.1. Источники питания
- •19.4.2. Режимы питания
- •19.4.2.1. Рабочие режимы
- •19.4.2.2. Спящие режимы
- •19.4.2.2.1. Режим пакетного сбора данных
- •19.4.2.3. Режимы останова
- •19.4.2.4. Режимы ожидания
- •19.4.2.5. Режим выключенного состояния
- •19.4.3. Переходы между режимами питания
- •19.4.4. Периферийные устройства с пониженным энергопотреблением
- •19.4.4.1. LPUART
- •19.4.4.2. LPTIM
- •19.5. Инспекторы источников питания
- •19.6. Отладка в режимах пониженного энергопотребления
- •19.7. Использование калькулятора энергопотребления CubeMX
- •20. Организация памяти
- •20.1. Модель организации памяти в STM32
- •20.1.1. Основы процессов компиляции и компоновки
- •20.2.1. Исследование бинарного ELF-файла
- •20.2.2. Инициализация секций .data и .bss
- •20.2.2.1. Пара слов о секции COMMON
- •20.2.3. Секция .rodata
- •20.2.4. Области Стека и Кучи
- •20.2.5. Проверка размера Кучи и Стека на этапе компиляции
- •20.2.6. Различия с файлами скриптов инструментария
- •20.3. Как использовать CCM-память
- •20.3.1. Перемещение таблицы векторов в CCM-память
- •20.4.1. Программирование MPU с использованием CubeHAL
- •21. Управление Flash-памятью
- •21.1. Введение во Flash-память STM32
- •21.2. Модуль HAL_FLASH
- •21.2.1. Разблокировка Flash-памяти
- •21.2.2. Стирание Flash-памяти
- •21.2.3. Программирование Flash-памяти
- •21.3. Байты конфигурации
- •21.3.1. Защита от чтения Flash-памяти
- •21.4. Дополнительные памяти OTP и EEPROM
- •21.5. Задержка чтения Flash-памяти и ускоритель ART™ Accelerator
- •21.5.1. Роль TCM-памятей в микроконтроллерах STM32F7
- •22. Процесс начальной загрузки
- •22.1.1. Программное физическое перераспределение памяти
- •22.1.2. Перемещение таблицы векторов
- •22.1.3. Запуск микропрограммы из SRAM с помощью инструментария GNU MCU Eclipse
- •22.2. Встроенный загрузчик
- •22.2.1. Запуск загрузчика из встроенного программного обеспечения
- •22.2.2. Последовательность начальной загрузки в инструментарии GNU MCU Eclipse
- •22.3. Разработка пользовательского загрузчика
- •22.3.2. Как использовать инструмент flasher.py
- •23. Запуск FreeRTOS
- •23.1. Введение в концепции, лежащие в основе ОСРВ
- •23.2.1. Структура файлов с исходным кодом FreeRTOS
- •23.2.1.2. Как импортировать FreeRTOS с использованием CubeMX и CubeMXImporter
- •23.3. Управление потоками
- •23.3.1. Состояния потоков
- •23.3.2. Приоритеты потоков и алгоритмы планирования
- •23.3.3. Добровольное освобождение от управления
- •23.3.4. Холостой поток idle
- •23.4. Выделение памяти и управление ею
- •23.4.1. Модель динамического выделения памяти
- •23.4.1.1. heap_1.c
- •23.4.1.2. heap_2.c
- •23.4.1.3. heap_3.c
- •23.4.1.4. heap_4.c
- •23.4.1.5. heap_5.c
- •23.4.2. Модель статического выделения памяти
- •23.4.3. Пулы памяти
- •23.4.4. Обнаружение переполнения стека
- •23.5. Примитивы синхронизации
- •23.5.1. Очереди сообщений
- •23.5.2. Cемафоры
- •23.5.3. Сигналы потоков
- •23.6. Управление ресурсами и взаимное исключение
- •23.6.1. Мьютексы
- •23.6.2. Критические секции
- •23.6.3. Обработка прерываний совместно с ОСРВ
- •23.7. Программные таймеры
- •23.7.1. Как FreeRTOS управляет таймерами
- •23.8. Пример из практики: Управление энергосбережением с ОСРВ
- •23.8.1. Перехват холостого потока idle
- •23.8.2. Бестиковый режим во FreeRTOS
- •23.9. Возможности отладки
- •23.9.1. Макрос configASSERT()
- •23.9.2. Статистика среды выполнения и информация о состоянии потоков
- •23.10. Альтернативы FreeRTOS
- •23.10.1. ChibiOS
- •23.10.2. ОС Contiki
- •23.10.3. OpenRTOS
- •24. Продвинутые методы отладки
- •24.1. Введение в исключения отказов Cortex-M
- •24.1.1.1. Как инструментарий GNU MCU Eclipse обрабатывает исключения отказов
- •24.1.1.2. Как интерпретировать содержимое регистра LR при переходе в исключение
- •24.1.2. Исключения отказов и их анализ
- •24.2.1. Представление Expressions
- •24.2.1.1. Мониторы памяти
- •24.2.2. Точки наблюдения
- •24.2.3. Режим Instruction Stepping Mode
- •24.2.4. Keil Packs и представление Peripheral Registers
- •24.2.5. Представление Core Registers
- •24.3. Средства отладки от CubeHAL
- •24.4. Внешние отладчики
- •24.4.1. Использование SEGGER J-Link для отладчика ST-LINK
- •24.4.2. Использование интерфейса ITM и трассировка SWV
- •24.5. STM Studio
- •24.6. Одновременная отладка двух плат Nucleo
- •25. Файловая система FAT
- •25.1. Введение в библиотеку FatFs
- •25.1.1. Использование CubeMX для включения в ваши проекты библиотеки FatFs
- •25.1.2. Наиболее важные структуры и функции FatFs
- •25.1.2.1. Монтирование файловой системы
- •25.1.2.2. Открытие файлов
- •25.1.2.3. Чтение и запись файла
- •25.1.2.4. Создание и открытие каталога
- •25.1.3. Как сконфигурировать библиотеку FatFs
- •26. Разработка IoT-приложений
- •26.2. Ethernet контроллер W5500
- •26.2.1. Как использовать шилд W5500 и модуль ioLibrary_Driver
- •26.2.1.1. Конфигурирование интерфейса SPI
- •26.2.1.2. Настройка буферов сокетов и сетевого интерфейса
- •26.2.2. API-интерфейсы сокетов
- •26.2.2.1. Управление сокетами в режиме TCP
- •26.2.2.2. Управление сокетами в режиме UDP
- •26.2.3. Перенаправление ввода-вывода на сокет TCP/IP
- •26.2.4. Настройка HTTP-сервера
- •26.2.4.1. Веб-осциллограф
- •27. Начало работы над новым проектом
- •27.1. Проектирование оборудования
- •27.1.1. Послойная разводка печатной платы
- •27.1.2. Корпус микроконтроллера
- •27.1.3. Развязка выводов питания
- •27.1.4. Тактирование
- •27.1.5. Фильтрация вывода сброса RESET
- •27.1.6. Отладочный порт
- •27.1.7. Режим начальной загрузки
- •27.1.8. Обратите внимание на совместимость с выводами…
- •27.1.9. …и на выбор подходящей периферии
- •27.1.10. Роль CubeMX на этапе проектирования платы
- •27.1.11. Стратегии разводки платы
- •27.2. Разработка программного обеспечения
- •27.2.1. Генерация бинарного образа для производства
- •Приложение
- •Принудительный сброс микроконтроллера из микропрограммы
- •B. Руководство по поиску и устранению неисправностей
- •Проблемы с установкой GNU MCU Eclipse
- •Проблемы, связанные с Eclipse
- •Eclipse не может найти компилятор
- •Eclipse постоянно прерывается при выполнении каждой инструкции во время сеанса отладки
- •Пошаговая отладка очень медленная
- •Микропрограмма работает только в режиме отладки
- •Проблемы, связанные с STM32
- •Микроконтроллер не загружается корректно
- •Невозможно загрузить микропрограмму или отладить микроконтроллер
- •C. Схема выводов Nucleo
- •Nucleo-F446RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F411RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F410RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F401RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F334R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F303RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F302R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F103RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F091RC
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F072RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F070RB
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-F030R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L476RG
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L152RE
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L073R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •Nucleo-L053R8
- •Разъемы, совместимые с Arduino
- •Morpho-разъемы
- •D. Корпусы STM32
- •LFBGA
- •LQFP
- •TFBGA
- •TSSOP
- •UFQFPN
- •UFBGA
- •VFQFP
- •WLCSP
- •E. Изменения книги
- •Выпуск 0.1 – Октябрь 2015
- •Выпуск 0.2 – 28 октября 2015
- •Выпуск 0.2.1 – 31 октября 2015
- •Выпуск 0.2.2 – 1 ноября 2015
- •Выпуск 0.3 – 12 ноября 2015
- •Выпуск 0.4 – 4 декабря 2015
- •Выпуск 0.5 – 19 декабря 2015
- •Выпуск 0.6 – 18 января 2016
- •Выпуск 0.6.1 – 20 января 2016
- •Выпуск 0.6.2 – 30 января 2016
- •Выпуск 0.7 – 8 февраля 2016
- •Выпуск 0.8 – 18 февраля 2016
- •Выпуск 0.8.1 – 23 февраля 2016
- •Выпуск 0.9 – 27 марта 2016
- •Выпуск 0.9.1 – 28 марта 2016
- •Выпуск 0.10 – 26 апреля 2016
- •Выпуск 0.11 – 27 мая 2016
- •Выпуск 0.11.1 – 3 июня 2016
- •Выпуск 0.11.2 – 24 июня 2016
- •Выпуск 0.12 – 4 июля 2016
- •Выпуск 0.13 – 18 июля 2016
- •Выпуск 0.14 – 12 августа 2016
- •Выпуск 0.15 – 13 сентября 2016
- •Выпуск 0.16 – 3 октября 2016
- •Выпуск 0.17 – 24 октября 2016
- •Выпуск 0.18 – 15 ноября 2016
- •Выпуск 0.19 – 29 ноября 2016
- •Выпуск 0.20 – 28 декабря 2016
- •Выпуск 0.21 – 29 января 2017
- •Выпуск 0.22 – 2 мая 2017
- •Выпуск 0.23 – 20 июля 2017
- •Выпуск 0.24 – 11 декабря 2017
- •Выпуск 0.25 – 3 января 2018
- •Выпуск 0.26 – 7 мая 2018
Управление Flash-памятью |
558 |
Если это так, мы не можем потерять асинхронные события (например, прерывание, которое уведомляет нас о передаче данных), потому что микроконтроллер остановлен (stalled), ожидая выполнение текущей операции. Если это так, то лучше всего переместить код в SRAM (и, в конечном итоге, также переместить и таблицу векторов).
21.3. Байты конфигурации
Байты конфигурации (Option bytes) – это два или более байт, биты которых являются специальными значениями конфигурации. Концепция байтов конфигурации аналогична той, что встречается в других архитектурах микроконтроллеров, например, fuse-битов в серии AVR от Atmel или битов конфигурации (Configuration Bits), заложенных в микроконтроллерах PIC от Microchip.
Каждый отдельный бит этих специальных байтов в области информационного блока (Information Block) имеет особое значение. Количество и тип параметров конфигурации зависят от конкретного микроконтроллера STM32. Наиболее распространенные параметры конфигурации:
•BOOT: в большинстве микроконтроллеров STM32 два бита конфигурации позволяют выбрать источник начальной загрузки (FLASH, системная память или
SRAM).
•RDP (англ. read protection): эти биты устанавливают уровень защиты от чтения Flash-памяти, и мы более подробно проанализируем их позже в данной главе.
•BOR_LEVEL: эти биты содержат порог уровня напряжения питания, который активирует/освобождает сброс. Они могут быть записаны для программирования нового уровня BOR. По умолчанию BOR отключен. Когда напряжение питания (VDD) падает ниже выбранного уровня BOR, генерируется сброс устройства.
•Поведение микроконтроллера при переходе в некоторые режимы понижен-
ного энергопотребления: почти во всех микроконтроллерах STM32 можно сконфигурировать микроконтроллер таким образом, чтобы он генерировал сброс при переходе в режим останова или спящий режим.
•Аппаратный сторожевой таймер: в некоторых микроконтроллерах STM32 существует один или два бита, используемых для конфигурирования WWDG и IWDG в «аппаратном режиме», то есть они автоматически запускаются после сброса микроконтроллера.
•Защита от записи во Flash-память: эти биты позволяют индивидуально защищать от записи некоторые секторы/страницы Flash-памяти, предотвращая запись в них, даже если Flash-память разблокирована. Если для заданного бита установлено значение «1», то соответствующий сектор/страница не защищен от записи; если, напротив, бит установлен в «0», то сектор/страница защищен от записи.
Для программирования байтов конфигурации существуют специальные процедуры, которые не зависят от процедур программирования всей Flash-памяти. Поэтому CubeHAL предоставляет специальные процедуры для использования.
Прежде всего, данную область необходимо разблокировать, вызвав функцию:
HAL_StatusTypeDef HAL_FLASH_OB_Unlock(void);
Далее, заданный байт конфигурации целиком программируется с помощью функции:
Управление Flash-памятью |
559 |
HAL_StatusTypeDef HAL_FLASHEx_OBProgram(FLASH_OBProgramInitTypeDef *pOBInit);
Значение байта конфигурации автоматически изменяется, сначала стирая информационный блок, а затем программируя все байты конфигурации значениями, передаваемыми в процедуру HAL_FLASHEx_OBProgram(). Функция принимает экземпляр структуры Си FLASH_OBProgramInitTypeDef, поля которой представляют собой содержимое заданного байта конфигурации. Для получения дополнительной информации о точном типе и количестве полей обратитесь к исходному коду CubeHAL.
Точно так же, чтобы извлечь содержимое заданного байта конфигурации, мы используем функцию:
HAL_FLASHEx_OBGetConfig(FLASH_OBProgramInitTypeDef *pOBInit);
После изменения байта конфигурации мы должны заставить микроконтроллер перезагрузить свой контент, используя функцию:
HAL_StatusTypeDef HAL_FLASH_OB_Launch(void);
Обратите внимание, что изменение некоторых битов конфигурации в отдельных микроконтроллерах STM32 может привести к сбросу микросхемы.
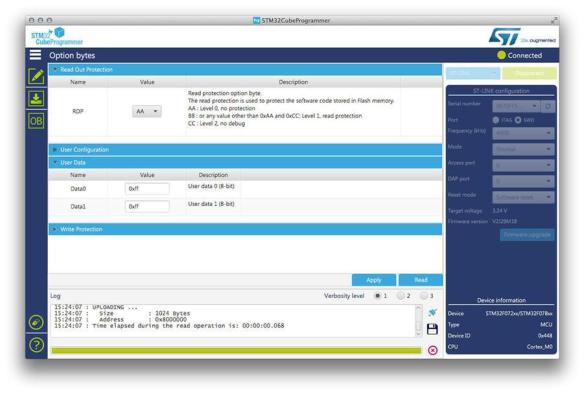
В конце концов, отладчик ST-LINK и связанный с ним STM32CubeProgrammer предоставляют возможность легко изменять байты конфигурации. Как только вы подключили отладчик ST-LINK к целевому микроконтроллеру, нажмите на значок Option bytes (третий зеленый значок слева). Появится раздел Option bytes, как показано на рисунке 1. Тот же инструмент STM32CubeProgrammer также позволяет стирать выбранные сектора/страницы Flash-памяти.
Рисунок 1: Диалоговое окно Option Bytes configuration в STM32CubeProgrammer

Управление Flash-памятью |
560 |
21.3.1. Защита от чтения Flash-памяти
Прочитайте внимательно
Некоторые процедуры, описанные в данном параграфе, могут сделать ваш микроконтроллер «кирпичом», навсегда не позволяющим вам программировать и стирать его. Внимательно прочитайте содержание этого параграфа и избегайте выполнения операций, если они вам не совсем понятны.
Один байт конфигурации (называемый RDP) заслуживает отдельного параграфа: байт конфигурации, касающийся защиты от чтения Flash-памяти. Во избежание нежелательного доступа к Flash-памяти через интерфейс отладки, можно временно или навсегда отключить доступ к чтению этой памяти из внешнего мира (очевидно, что доступ из ядра ЦПУ и контроллеров DMA всегда возможен). Существует три уровня защиты, которые соответствуют трем различным значениям для хранения в байте конфигурации:
•Уровень 0 (без защиты от чтения): когда уровень защиты от чтения установлен на Уровень 0 записью 0xAA в байт конфигурации защиты от чтения (RDP), все операции чтения/записи (если защита от записи не установлена) из/во Flashпамяти или резервного SRAM возможны во всех конфигурациях начальной загрузки (пользовательская начальная загрузка из Flash-памяти, отладка или начальная загрузка из ОЗУ).
•Уровень 1 (защита от чтения включена): это уровень защиты от чтения по умолчанию после стирания байтов конфигурации (которое автоматически выполняется процедурой HAL_FLASHEx_OBProgram()). Уровень 1 защиты от чтения ак-
тивируется записью любого значения (кроме 0xAA и 0xCC, используемых для установки Уровня 0 и Уровня 2 соответственно) в байт конфигурации RDP. При установленном Уровне 1 защиты от чтения доступ (чтение, стирание, программирование) к Flash-памяти или резервному SRAM не может быть выполнен при подключенном отладчике или выполнении начальной загрузки из ОЗУ или из загрузчика системной памяти. В случае запроса чтения генерируется исключение отказа шины BusFault. И, напротив, при загрузке из Flash-памяти разрешается доступ (чтение, стирание, программирование) к Flash-памяти и резервному SRAM из пользовательского кода. Когда Уровень 1 активен, программирование байта конфигурации защиты от чтения (RDP) до Уровня 0 приводит к массовому стиранию Flash-памяти и резервного SRAM. В результате область пользовательского кода очищается перед снятием защиты от чтения. Массовое стирание стирает только область пользовательского кода. Другие байты конфигурации, включая защиту от записи, остаются без изменений до операции массового стирания. Область памяти OTP не подвержена массовому стиранию и остается неизменной. Массовое стирание выполняется только тогда, когда активен Уровень 1 и запрошен Уровень 0. При увеличении уровня защиты от чтения (0→1, 1→2, 0→2), массового стирания не происходит.
•Уровень 2 (!!!отладка/защита от чтения микросхемы навсегда отключена!!!):
Уровень 2 защиты от чтения активируется записью 0xCC в байт конфигурации RDP. Когда установлен Уровень 2 защиты от чтения:
−Все средства защиты, предусмотренные Уровнем 1, активны.
−Начальная загрузка из ОЗУ больше не разрешена.