


Организация памяти |
539 |
Если, наоборот, мы хотим хранить данные в CCM-памяти, то нам также нужно инициализировать их, как это было сделано для областей .bss и .data в обычной памяти SRAM. В этом случае нам нужен более полный скрипт компоновщика:
/* Используется кодом запуска (startup) для инициализации данных в CCM */ _siccm = LOADADDR(.ccm.data);
/* Секция инициализированных данных в CCM */
.ccm.data : ALIGN(4)
{
_sccmd = .;
*(.ccm.data .ccm.data*)
. = ALIGN(4); _eccmd = .;
} >CCM AT>FLASH
/* Секция неинициализированных данных в CCM */
.ccm.bss (NOLOAD) : ALIGN(4)
{
_sccmb = .; *(ccm.bss ccm.bss*)
. = ALIGN(4); _eccmb = .;
} >CCM
Здесь мы определяем две секции: .ccm.data, которая будет использоваться для хранения глобальных инициализированных данных в CCM, и .ccm.bss, используемая для хранения глобальных неинициализированных данных. Как и для обычной SRAM, потребуется
вызвать процедуры __initialize_data() и __initialize_bss() из процедуры _start():
...
__initialize_data(&_siccm, &_sccmd, &_eccmd);
__initialize_bss(&_sccmb, &_eccmb);
...
Затем, чтобы поместить данные в CCM, мы должны указать компилятору использовать ключевое слово attribute:
uint8_t initdata[] __attribute__((section(".ccm.data"))) = {0x1, 0x2, 0x3, 0x4}; uint8_t uninitdata __attribute__((section(".ccm.bss")));
20.3.1. Перемещение таблицы векторов в CCM-память
CCM-память также может использоваться для хранения процедур ISR, если переместить в нее всю таблицу векторов. Это может быть в особенности полезно для ISR, которые должны быть обработаны в кратчайшие сроки. Однако перемещение таблицы векторов требует дополнительных шагов, поскольку архитектура Cortex-M разработана таким образом, что таблица векторов начинается с адреса 0x0000 0004 (который соответствует адресу 0x0800 0004 внутренней Flash-памяти). Шаги, которые необходимо проделать, следующие:

Организация памяти |
540 |
•определить размещаемую в SRAM CCM таблицу векторов с помощью ключевого
слова __attribute__((section(".isr_vector_ccm"));
•определить обработчики исключений для требуемых исключений и ISR и поместить их в соответствующую секцию, используя ключевое слово
__attribute__((section(".ccm"));
•определить размещаемую во Flash-памяти минимальную таблицу векторов, состоящую из указателя MSP и адреса обработчика исключения сброса Reset и начинающуюся с адреса 0x0800 0000;
•переместить таблицу векторов в обработчике исключения сброса Reset копированием содержимого секции .ccm из Flash-памяти в SRAM.
Давайте начнем с определения размещаемой в SRAM CCM таблицы векторов. Определим файл с именем ccm_vector.c со следующим содержимым:
|
Имя файла: src/ccm_vector.c |
|
|
|
|
|
|
1 |
|
#include <stm32f3xx_hal.h> |
|
2 |
|
|
|
3 |
|
#define GPIOA_ODR |
((uint32_t*)(GPIOA_BASE + 0x14)) |
4 |
|
|
|
5 |
|
extern const uint32_t _estack; |
|
6 |
|
|
|
7 |
|
void SysTick_Handler(void); |
|
8 |
|
|
|
9 |
|
uint32_t *ccm_vector_table[] __attribute__((section(".isr_vector_ccm"))) = { |
|
10 |
|
(uint32_t *)&_estack, |
// указатель начала стека |
11 |
|
(uint32_t *) 0, |
// Reset_Handler не перемещаемый |
12(uint32_t *) 0,
13(uint32_t *) 0,
14(uint32_t *) 0,
15(uint32_t *) 0,
16(uint32_t *) 0,
17(uint32_t *) 0,
18(uint32_t *) 0,
19(uint32_t *) 0,
20(uint32_t *) 0,
21(uint32_t *) 0,
22(uint32_t *) 0,
23(uint32_t *) 0,
24(uint32_t *) 0,
25(uint32_t *) SysTick_Handler
26};
27
28void __attribute__((section(".ccm"))) SysTick_Handler(void) {
29*GPIOA_ODR = *GPIOA_ODR ? 0x0 : 0x20; // Вызывает мигание светодиода LD2
30}
Файл содержит всего лишь таблицу векторов, которая находится в секции
.isr_vector_ccm, и обработчик исключения SysTick, который находится в секции .ccm. Далее нам нужно перестроить скрипт компоновщика следующим образом:
Организация памяти |
541 |
Имя файла: src/ldscript6.ld
75/* Используется кодом запуска (startup) для загрузки ISR в CCM из FLASH */
76_slccm = LOADADDR(.ccm);
77
78.ccm : ALIGN(4)
79{
80_sccm = .;
81*(.isr_vector_ccm)
82*(.ccm)
83KEEP(*(.isr_vector_ccm .ccm))
85. = ALIGN(4);
86_eccm = .;
87} >CCM AT>FLASH
89/* Размер секции .ccm */
90_ccmsize = _eccm - _sccm;
Скрипт компоновщика не содержит ничего отличного от того, что мы уже видели. Определяется секция .ccm, и мы даем указание компоновщику сначала поместить в нее содержимое секции .isr_vector_ccm, а затем содержимое из секции .ccm, которая в нашем случае содержит всего лишь процедуру SysTick_Handler. Мы также даем указание компоновщику сохранить содержимое секции .ccm во Flash-памяти (используя директиву CCM AT>FLASH), в то время как адреса VMA секции .ccm привязываются к диапазону адресов CCM-памяти (то есть к начальному адресу 0x1000 0000).
Наконец, нам нужно вручную скопировать содержимое секции .ccm из Flash-памяти в CCM-память и переместить таблицу векторов. Эта работа снова выполняется в исключе-
нии Reset_Handler.
Имя файла: src/main-ex6.c
68/* Минимальная таблица векторов */
69uint32_t *vector_table[] __attribute__((section(".isr_vector"))) = {
70(uint32_t *)&_estack, // указатель начала стека
71(uint32_t *)_start // main в качестве Reset_Handler
72};
73
74void __attribute__ ((noreturn,weak))
75_start (void) {
76/* Копирование секции .ccm из FLASH-памяти (_slccm) в CCM-память */
77memcpy(&_sccm, &_slccm, (size_t)&_ccmsize);
78
79 __DMB(); // Это гарантирует, что запись в память завершена
80
81SCB->VTOR = (uint32_t)&_sccm; /* Перемещение таблицы векторов в 0x1000 0000 */
82SYSCFG->RCR = 0xF; /* Включение защиты от записи для CCM-памяти */
83
84 __DSB(); // Это гарантирует, что следующие команды используют новую конфигурацию
85
86 __initialize_data(&_sidata, &_sdata, &_edata);
Организация памяти |
542 |
87__initialize_bss(&_sbss, &_ebss);
88main();
89
90for(;;);
91}
92
93int main() {
94/* Разрешение подачи тактирования на периферийное устройство GPIOA */
95*RCC_APB1ENR |= 0x1 << 17;
96*GPIOA_MODER |= 0x400; // Установка MODER[11:10] = 0x1
97
98SysTick_Config(4000000); // Истекает каждые 0,5 с
99}
100
101void delay(uint32_t count) {
102while(count--);
103}
Строки [69:72] определяют минимальную таблицу векторов, используемую при сбросе ЦПУ. Она состоит только из указателя MSP и адреса исключения Reset_Handler, предоставленного процедурой _start(). Когда микроконтроллер сбрасывается, в строке 77 мы копируем содержимое секции .ccm из Flash-памяти (базовый адрес хранится в переменной _slccm) в CCM-память, а затем перемещаем всю таблицу векторов, назначая позицию массива ccm_vector_table в CCM-памяти регистру VTOR в блоке управления системой (System Control Block, SCB) – строка 81. Далее мы включаем защиту от записи во всей CCM-памяти, чтобы избежать нежелательных операций записи, которые могут повредить код.
CCM-память поделена на страницы размером 1 КБ. Каждый бит в регистре
RCR контроллера системной конфигурации (System Configuration Controller, SYSCFG) используется для установки защиты от записи индивидуально каждой странице (бит 1 устанавливает защиту для первой страницы, бит 2 устанавливает защиту для второй страницы и т. д.). Здесь мы защищаем от записи всю CCM-память микроконтроллера STM32F334, которая имеет CCM-память, состоящую из четырех страниц размером 1 КБ.
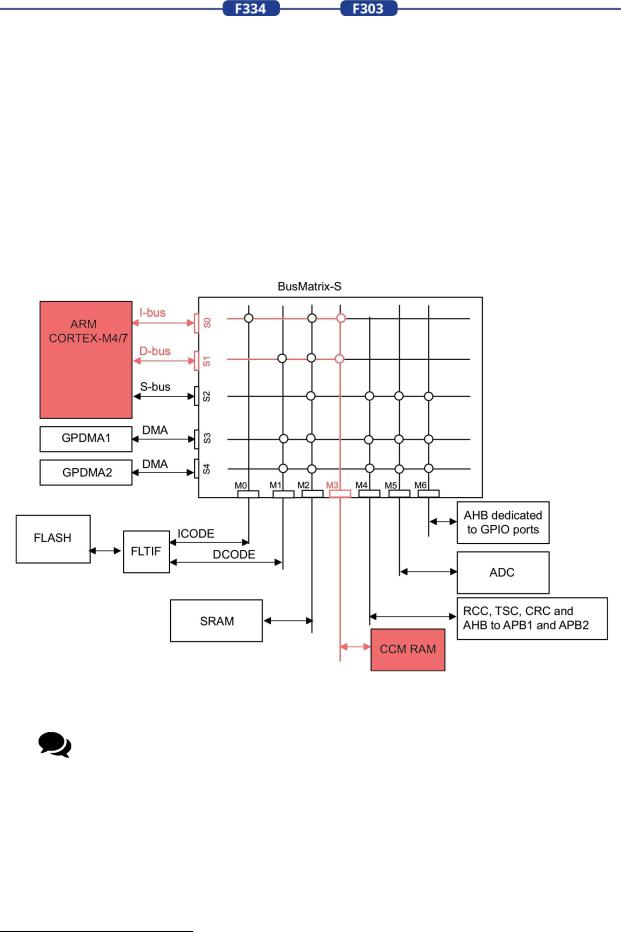
Важно отметить, что, если мы отключим запись для всей CCM-памяти, мы не сможем поместить в нее глобальные или статически выделенные переменные, иначе произойдет отказ. С другой стороны, помещение как кода, так и данных в CCM-память приводит к тому, что мы теряем преимущества, которые дает CCM-память, из-за одновременного доступа к одной и той же памяти как по шине D-Bus, так и по шине I-Bus (рассмотрев рисунок 5 вы можете убедиться, что CCM-память подключена лишь к одному ведущему порту шинной матрицы – порту M3; таким образом доступ из D-Bus и I-Bus организуется шинной матрицей).
Перемещение таблицы векторов не ограничивается CCM-памятью. Как мы увидим в Главе 22, этот метод также используется, когда микроконтроллер загружается из других источников, отличных от внутренней Flash-памяти. В

Организация памяти |
544 |
областей памяти). Для области нормальной памяти загрузка/сохранение выполняется ЦПУ не обязательно в порядке, указанном в программе. Памяти SRAM и FLASH – два примера нормальной памяти.
•Память устройства: в пределах области памяти устройства загрузка и сохранение выполняются в строгой очередности. Это гарантирует установку регистров в правильном порядке, иначе это повлияет на поведение устройства.
•Строго упорядоченная память: все всегда выполняется в перечисленном программой порядке, при этом ЦПУ ожидает завершения выполнения инструкций загрузки/сохранения (эффективный доступ к шине), прежде чем выполнить следующую инструкцию в потоке программы. Это может привести к снижению производительности.
|
Таблица 2: Атрибуты области памяти |
Атрибут области |
Описание |
|
|
XN |
Никогда не исполнять |
AP |
Право доступа (см. таблицу 3) |
TEX |
Поле расширения типов (недоступно в Cortex-M0+) |
S |
Разделяемая |
C |
Кэшируемая |
B |
Буферизируемая |
SRD |
Включение/отключение подобласти |
SIZE |
Размер области памяти |
Каждая область памяти имеет восемь атрибутов, представленных в таблице 2:
•Никогда не исполнять (Execute never, XN): область памяти, отмеченная данным атрибутом, не позволяет исполнять программный код.
•Право доступа (Access Permission, AP): определяет права доступа к области памяти. Права устанавливаются как для привилегированного (например, ядра ОСРВ), так и для непривилегированного кода (например, отдельного потока). В таблице 3 перечислены все возможные комбинации.
•Поле расширения типов (Type Extension field, TEX), Кэшируемая (Cacheable, C) и Буферизируемая (Bufferable, B): эти поля используются для определения свойств кэширования области и, в некоторой степени, ее разделяемости (совместного использования). Они кодируются в соответствии с таблицей 4. Обратите внимание, что в ядрах Cortex-M0+ поле TEX всегда равно 0. Это потому, что ядра Cortex-M0+ поддерживают один уровень политики кэширования.
•Разделяемая (Shareable, S): это поле конфигурирует область разделяемой памяти. Система памяти обеспечивает синхронизацию данных между ведущими устройствами шины в системе, например, процессором с контроллером DMA. Строго упорядоченная память всегда разделяемая. Если несколько ведущих устройств шины могут получить доступ к неразделяемой области памяти, программное обеспечение должно гарантировать согласованность данных между ведущими устройствами шины. Это поле не поддерживается в архитектуре ARMv6-M и поэтому всегда устанавливается в 0 в процессорах Cortex-M0+.
•Включение/отключение подобласти (Subregion Enable/Disable, SRD): определяет,
включена ли конкретная подобласть. Отключение подобласти означает, что другая область, перекрывающая отключенный диапазон, будет учитываться при совпадении. Если нет другой включенной области, перекрывающей отключенную подобласть, то MPU генерирует отказ.
Организация памяти |
545 |
•Размер области памяти (SIZE): задает размер области памяти. Размер не может быть произвольным, но он может принимать значение из хорошо известного пула размеров областей (зависит от конкретного семейства STM32).
Таблица 3: Права доступа к области
Привилегированный |
Непривилегированный |
Описание |
|
|
|
Нет доступа |
Нет доступа |
Обращение к области приводит к отказу |
|
|
разрешения доступа |
RW (чтение/запись) |
Нет доступа |
Доступ только для привилегированного |
|
|
программного обеспечения |
RW (чтение/запись) |
RO (только чтение) |
Запись непривилегированным ПО вызовет |
|
|
отказ разрешения доступа |
RW (чтение/запись) |
RW (чтение/запись) |
Полный доступ к области |
Непредсказуемо |
Непредсказуемо |
ЗАРЕЗЕРВИРОВАНО |
RO (только чтение) |
Нет доступа |
Чтение только привилегированным ПО |
RO (только чтение) |
RO (только чтение) |
Только чтение, привилегированным и не- |
|
|
привилегированным ПО |
Как мы увидим в следующей главе, микроконтроллеры STM32F7 предоставляют встроенную кэш-память первого уровня (L1-cache). Для этих микроконтроллеров доступны следующие дополнительные атрибуты памяти:
•Кэшируемая/некэшируемая: означает, что выделенная область может быть кэширована или нет.
•Сквозная запись, без размещения записываемых данных (Write through with no write allocate): при совпадениях записывается в кэш и основную память, при несовпадениях обновляется блок в основной памяти без дублирования этого блока в кэш-памяти.
•Обратная запись, без размещения записываемых данных (Write-back with no write allocate): при совпадениях записывается в кэш, устанавливая грязный бит (dirty bit) для блока, основная память не обновляется. При несовпадении обновляется блок в основной памяти без его дублирования в кэш-памяти.
•Обратная запись, с размещением записываемых и считываемых данных
(Write-back with write and read allocate): при совпадениях записывается в кэш,
устанавливая грязный бит (dirty bit) для блока, основная память не обновляется. При несовпадении обновляется блок в основной памяти с его дублированием в кэш-памяти.
Таблица 4: Свойства кэширования и разделяемости областей
TEX |
C |
B |
Тип памяти |
Разделяемая |
Описание |
|
|
|
|
|
|
000 |
0 |
0 |
Строго упорядоченная |
Да |
Строго упорядоченная |
000 |
0 |
1 |
Память устройства |
Да |
Разделяемая память устройства |
000 |
1 |
0 |
Нормальная |
Зависит от бита S |
Сквозная запись, запись без выделения |
000 |
1 |
1 |
Нормальная |
Зависит от бита S |
Отложенная запись, запись без выделения |
001 |
0 |
0 |
Нормальная |
Зависит от бита S |
Не кэшируемая |
001 |
0 |
1 |
Зарезервировано |
Зарезервировано |
Зарезервировано |
001 |
1 |
0 |
Не определено |
Не определено |
Не определено |
001 |
1 |
1 |
Нормальная |
Зависит от бита S |
Отложенная запись, запись и чтение |
|
|
|
|
|
с выделением |
010 |
0 |
0 |
Память устройства |
Нет |
Неразделяемая память устройства |
010 |
0 |
1 |
Зарезервировано |
Зарезервировано |
Зарезервировано |