

при уклоне i 20‰ – движение с тяговым усилием на ведущие колеса независимо от протяженности спуска;
при 30‰ i 50‰ – движение с выключенным сцеплением на участках длиной до 300 – 500 м, торможение двигателем в нижней части;
при i 60‰ – торможение двигателем; при спусках длиной менее 1000 м – совместное торможение двигателем и колесными тормозами.
Подъемы круче 30 – 40‰ автомобили большой грузоподъемности и автопоезда, меющие малый запас мощности, могут преодолеть лишь с пон женными скоростями, вынуждая весь транспортный по-
ток следовать за н ми с той же скоростью. |
|
|
|||
С |
|
условий движения на подъем на до- |
|||
Для создан я |
|
||||
рогах II III техн ческ |
категорий устраивают дополнительные поло- |
||||
сы на подъем. |
|
|
|
|
|
лагоприятных5.5. Расстояние видимости поверхности дороги |
|
||||
Для обеспечен я |
езопасности движения необходимо обеспечить |
||||
требуемое расстояние видимости поверхности дороги. Расчетная ви- |
|||||
димость – расстояниеавтомобилемперед |
, на которое водитель дол- |
||||
жен видеть перед со ой дорогу, чтобы, заметив препятствие, осознать |
|||||
его опасность и успеть затормозить и остановиться. Наименьшее рас- |
|||||
стояние видимости для остановки должно обеспечивать видимость |
|||||
любых предметов, имеющихАвысоту 0,2 м и более, находящихся на |
|||||
середине полосы движения, с высоты глаз водителя автомобиля 1,2 м |
|||||
от поверхности проезжей части [3]. |
нахождения расстояния ви- |
||||
димости рассмотрим рис. 5.3. |
|
|
|
|
|
Расчетное расстояние видимости поверхности дороги |
|
||||
|
|
Для |
(5.8) |
||
Sрасч = l1 + l2 + l3 |
, |
|
|||
где l1 – путь, проходимый за время реакции водителя; l2 – путь тор- |
|||||
можения; l3 – расстояние безопасности.
Для остановки автомобиля или снижения скорости движения ис-
пользуют тормоза. |
И |
Длина пути, на котором водитель может остановить автомобиль, движущийся с расчетной скоростью, называется тормозной путь.
Между моментом, когда водитель замечает препятствие и моментом начала торможения проходит некоторый промежуток времени – время реакции водителя. Продолжительность реакции водителя составляет 0,6 – 2,0 с. При расчетах принимается t1 = 1 – 2 с.
54
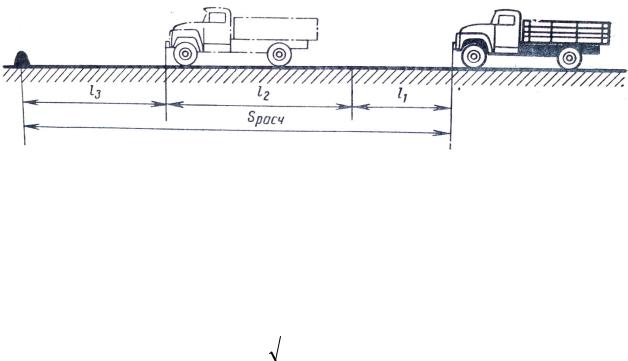
Схема |
l1 = V· t1. , |
(5.9) |
|
Рис. 5.3. |
определения расстояния видимости поверхности дороги |
||
При этом путь, проходимый автомобилем за время реакции водилениителя:
где V – скорость дв жения, м/с.
Дл на тормозного пути автомобилем ST при равномерном замед-
определяется з зависимости |
|
|
|||
V = |
|
2aST |
, |
|
(5.10) |
где а – отр цательное значение ускорения при торможении, а = ·gпр = |
|||||
=5,5 – 7 м/с2. |
|
|
|
|
|
Длина тормозного пути |
|
КЭV 2 |
|
|
|
ST = l2 = |
|
, |
(5.11) |
||
2g( пр i f ) |
|
|
|||
где КЭ – коэффициент эффективности торможения следует принимать |
|||||
для легковых автомобилей КЭ |
|
Д |
|
||
= 1,2 , для грузовых автомобилей и ав- |
|||||
тобусов КЭб= 1,4. При расчетеАгеометрических элементов дорог следу- |
|||||
ет принимать КЭ = 1,2.
Между остановившимся автомобилем и препятствием должно ос-
таваться расстояние безопасности l3, равное 5 – 10 м. |
|
|||||
|
|
|
|
И |
||
Поскольку расчеты выполняют для скорости движения автомо- |
||||||
биля в м/с, то зависимость (5.9) представляют с учетом размерности |
||||||
скорости в км/ч: |
|
|
|
|
||
|
V t1 |
|
КЭV 2 |
|
|
|
Sрасч = 3,6 |
+ |
+ (5 – 10), м. |
(5.12) |
|||
254( пр i f ) |
||||||
Требуемое расстояние видимости поверхности дороги при проектировании регламентировано [39] и приведено в табл. 5.5.
55

|
Расстояние видимости поверхности дороги |
Таблица 5.5 |
||
|
|
|||
|
|
|
||
|
Расчетная скорость, |
Наименьшее расстояние видимости, м |
||
|
км/ч |
|
|
|
С |
|
|
|
|
для остановки |
встречного авто- |
при обгоне |
||
|
мобиля |
|
||
|
|
|
|
|
|
150 |
300 |
- |
- |
|
120 |
250 |
450 |
800 |
|
100 |
200 |
350 |
700 |
и |
250 |
600 |
||
80 |
150 |
|||
|
60 |
85 |
170 |
500 |
|
50 |
75 |
130 |
400 |
|
40 |
55 |
110 |
- |
|
30 |
45 |
90 |
- |
|
20 |
25 |
50 |
- |
Рекомендуется при проектировании плана и продольного профиля обеспеч вать расстояние видимости для остановки автомобилей – не менее 450 м; расстояние видимости встречного автомобиля – не
менее 750 м [39].
бА5.6. Расстояние боковой видимости
При проектировании дорог в плотно застроенной местности, особенно в городских условиях, а также на пересечениях с автомобильными и железными дорогами в одном уровне, требуется обеспечить
боковую видимость придорожной полосы. |
Водителю |
необходимо |
|||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
Д |
|
||||
|
|
|
|
|
В |
иметь возможность |
заблаго- |
||||
|
|
|
|
|
|
|
временно увидеть |
пересече- |
|||
|
|
|
Va |
|
|
ние и пешехода, движущего- |
|||||
|
|
|
|
|
|
|
ся со скоростью Vп, и успеть |
||||
|
|
|
|
|
|
|
|||||
|
|
|
Sрасч |
|
|
остановиться. |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Sбок |
|
И |
||||
|
|
|
|
|
|
||||||
|
|
|
|
|
|
Минимальное |
расстоя- |
||||
|
|
|
Vп |
|
|||||||
|
|
|
ние боковой видимости |
Sбок |
|||||||
|
|
|
|
|
|
|
|||||
|
Рис. 5.4. Схема определения расстояния |
(рис. 5.4) пешехода или |
|||||||||
|
|
|
боковой видимости: |
транспортного |
средства |
по |
|||||
|
|
|
В – ширина проезжей части дороги; |
пересекаемой дороге. |
|
||||||
|
Sрасч – расчетное расстояние видимости |
|
|
|
|
|
|||||
поверхности дороги
Sбок = |
Vп |
S |
расч |
, |
(5.13) |
|
|||||
|
V |
|
|
||
|
a |
|
|
|
|
Здесь Vа – скорость движения автомобиля.
Как указано в [39], во всех случаях, где по местным условиям возможно регулярное появление на дороге людей и животных, следу- Сет обеспечивать боковую видимость прилегающей к дороге полосы,
отстоящей от бровки земляного полотна для дорог, проектируемых для расчетной скорости 100 км/ч и выше на расстояние 25 м, для остальных дорог – 15 м.
деляютвыемкиш р ну полос расчистки леса и кустарника, величину срезки откосов расстояние переноса строений. Величину расчистки определяют расчетом, а уровень срезки откосов выемки принимают одинаковым с уровнемАровки земляного полотна. Видимость в плане
5.7. Обеспечение видимости на кривых в плане
При проект рован и дорог в плане должно быть обеспечено необход мое брасстоян е видимости. На участках кривых в плане опре-
проверяют при движении автомо иля по внутренней полосе движения. Принимается, что глаз водителя расположен посередине полосы движения и на высоте 1,2 м.
ектории движения автомобиля намечают ряд точек, от которых откладывают расстояние видимости. Концы этих отрезков соединяют прямыми линиями, огибающая линия определяет границу видимости
(рис. 5.5).
Намечают уровень срезки в выемках с учетом зарастания полок травой (рис. 5.6). И
На плане закругления, вычерченном в крупном масштабе, на тра- Д
Срезка должна начинаться на прямой или переходной кривой на расстоянии видимости от начала и конца кривой.
Значительно ухудшается видимость на кривых в плане в ночное время. Фары автомобиля освещают дорогу на расстояние не более 100 м, а середина пучка света фар направлена по касательной к закруглению дороги. Лишь при больших радиусах кривых и на прямых свет фар располагается в пределах дороги.
Для обеспечения видимости ночью на расстояние 100 м радиус кривой в плане должен быть не менее 1000 м.
57