

1798
.pdfМинистерство образования РФ Сибирская государственная автомобильно-дорожная
академия (СибАДИ)
А.И. Руппель
КРАТКИЙ КУРС МЕХАНИКИ
Учебное пособие для студентов немашиностроительных
специальностей вузов
Омск Издательство СибАДИ
2002
2
УДК 621.031 ББК 30.12 Р 86
Рецензенты: д-р техн. наук, проф.В.Д. Белый д-р техн. наук, проф. В.Н. Тарасов
Работа одобрена редакционно-издательским советом академии в качестве учебного пособия по дисциплине «Механика» для специальностей 061111 «Производственный менеджмент», 240400 «Организация дорожного движения», 060813 «Экономика и управление на предприятиях транспорта».
Руппель А.И. КРАТКИЙ КУРС МЕХАНИКИ: учеб. пособие. – Омск: Изд-во СибАДИ, 2002. – 209 с.
В настоящем пособии кратко изложены основы теоретической механики, теории механизмов и машин, сопротивления материалов и деталей машин. Теоретические положения и выводы формул даны в единой методической системе, которая дает наглядность и раскрывает физическую сущность явлений. Приводятся примеры решения задач. Пособие предназначено для студентов немеханический специальностей стационарной и заочной форм обучения.
Табл. 12. Ил.125. Библ. 14 назв.
ISBN 5–93204–090–4 |
© Руппель А.И., 2002 |
|
© Издательство СибАДИ, 2002 |
3
В В Е Д Е Н И Е
Необходимость в создании учебного пособия, в котором отражены все разделы механики: теоретическая механика, сопротивление материалов, теория механизмов и машин и детали машин, возникла в связи с тем, что вузовские учебники по перечисленным дисциплинам очень объемные и не соответствуют программе подготовки менеджера, инженера-экономиста и т. д.
Учебное пособие написано в соответствии с рабочей программой по «Основам механики», рассмотренной на заседании кафедры деталей машин и утвержденной на методическом совете факультета «Технологические и транспортные» машины. Оно состоит из четырех разделов: 1. Основы теоретической механики. 2. Основы теории механизмов и машин. 3. Основы сопротивления материалов. 4. Детали машин.
Главное назначение курса «Основы механики» – ознакомить с основными понятиями и методами анализа, присущими машиностроению, чтобы в дальнейшей практической деятельности будущие менеджеры и экономисты нашли общий язык с механиками. Объем учебника краток и определен малым временем, отводимым на данный курс, поэтому неизбежно неполное изложение разделов. Теоретический материал в учебном пособии иллюстрируется рисунками и примерами решения задач. В пособии принята международная система единиц физических величин
(СИ).
Учебное пособие по механике предназначается для немашиностроительных вузов, у которых на изучение механики отводится сравнительно небольшое количество часов.
Современное человечество вооружено техникой, которая окружает нас повсюду и выполняет самую разнообразную полезную работу. Техника
– это машины и приборы, которые используют различные явления природы и заставляют их служить человеку. Каждое устройство состоит из разных частей, выполняющих свои функции. Основу всех машин и многих аппаратов составляет механическая часть, которая состоит из корпуса и движущихся тел, связанных между собой. Кроме механической части, в машине имеются электрическая, гидравлическая, пневматическая и другие части. Бывают немеханические машины, например, ЭВМ, которые не содержат механической части. В большинстве современных машин происходит преобразование электрической, тепловой, химической энергии в механическую. Для этого служат электродвигатели (электромоторы), двигатели внутреннего сгорания, электрохимические аккумуляторы и др.
Механическая часть машины, состоящая из твердых тел (деталей) и предназначенная для выполнения полезной работы, называется
4
механизмом. Эта часть машины является объектом изучения в нашем курсе.
Если из твердых тел (деталей) построить механизм, то нужно их соединить друг с другом, чтобы обеспечить их заданные относительные движения. Подвижные соединения соприкасающихся деталей называют кинематическими парами, а соединяемые ими детали - звеньями. Система звеньев, подвижно связанных между собой, образует кинематическую цепь. Механизм представляет собой кинематическую цепь, используемую для выполнения полезной механической работы. Примерами могут служить подъемные краны, автомобили, тракторы, дорожные машины, станки, прессы, молоты, насосы, вентиляторы и многое другое.
Несмотря на большое разнообразие механизмов и машин, они состоят из сравнительно небольшого числа однотипных деталей: корпусов, валов, зубчатых колес, рычагов и т.д., для которых применяют одни и те же методы расчета и анализа в казалось бы далеких друг от друга отраслях техники. Это делает механику с ее разделами универсальной общеобразовательной технической дисциплиной, необходимой каждому инженеру. В нашем курсе мы будем изучать не специальные, а универсальные наиболее распространенные механизмы и их детали.
Изучение данного курса позволяет обоснованно выбирать и эксплуатировать различные технические средства, применяемые в различных промышленных и транспортных предприятиях, а также иметь представление о расчете и проектировании этих средств.
Задачами дисциплины являются:
Получение основ знаний общих законов движения и равновесия материальных тел.
Освоение основных методов расчета элементов конструкций и машин на прочность и жесткость.
Ознакомление с устройством простых механизмов и машин. Краткий курс механики базируется на общенаучных дисциплинах:
математике, физике, инженерной графике и др. Знания, полученные в данном курсе, могут быть использованы в специальных дисциплинах, изучающих оборудование, с которым будут сталкиваться студенты в своей практической работе.
5
Часть I. ОСНОВЫ ТЕОРЕТИЧЕСКОЙ МЕХАНИКИ
1. СТАТИКА
1.1.Основные понятия статики
1.1.1. Статика и ее задачи
Статика – это раздел механики, изучающий равновесие тела под действием сил. Силы бывают статические и динамические. Статические силы постоянны во времени, к ним относят силу пружины, силу постоянного давления жидкости или газа, силу электромагнитного поля и т.д. Инерционные или динамические силы возникают в результате ускоренного или криволинейного движения. (Вспомним торможение автобуса или его крутой поворот.) Эти силы изучаются в динамике.
Статика решает две основные задачи:
Замену приложенных к телу сил одной равнодействующей силой (сложение и разложение сил).
2.Определение условия равновесия тел под действием сил (определение величины и направления уравновешивающей силы).
Прикладные задачи статики:
Определение реакций в опорах строительных конструкций. Определение усилий в элементах конструкций.
3.Определение равновесия и устойчивости конструкций и т.д.
1.1.2. Абсолютно твердое тело и материальная точка
Все тела в статике рассматриваются абсолютно твердыми, не изменяющими свою форму и размеры под действием сил. Дело в том, что изменения эти настолько малы, что ими можно пренебречь, т.к. они не влияют на условия равновесия тел.
В том случае, когда размеры тела не имеют значения в задаче, для удобства изучения в механике тело можно рассматривать как материальную точку, в которой сосредоточена вся масса тела. Так, например, при изучении движения планет, полета снаряда, движения автобуса по дороге и т.д. их считают материальными точками, так как их размеры малы по сравнению с траекторией движения.
1.1.3.Сила и ее векторное изображение
Сила, действующая на тело, возникает в результате действия какого-либо поля (например, сила веса) или при взаимодействии одного
6
тела на другое (например, электровоз тащит вагоны, человек тащит санки, молоток бьет по гвоздю, газ давит на поршень и т.д.).
Эффект действия силы характеризуется тремя элементами: численным значением силы (модулем), направлением силы и точкой приложения силы.
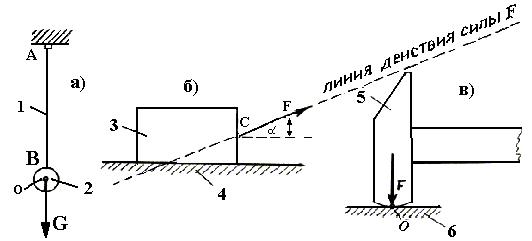
Рис.1.1. Векторное изображение сил
Сила - векторная величина. Вектор силы изображается отрезком, на конце которого ставится стрелка. Длина отрезка выражает численное значение силы. Чем сила больше, тем отрезок длиннее. Направление стрелки указывает направление вектора. Вектор как силу обозначают заглавной буквой латинского алфавита P, F, Q, G и т.д. В тексте вектор выделяют жирным шрифтом P, F, Q, G и т.д.
Линией действия силы (рис. 1.1, б) называют прямую, проведенную как продолжение вектора в обе стороны неограниченно.
Точкой приложения силы называют точку, в которой сила действует на тело (см. рис. 1.1, а – точка О, рис. 1.1, б – точка C, рис. 1.1, в
– точка О).
Модуль, или численное значение силы, в Международной системе СИ измеряется в ньютонах (Н). Кроме этого применяют более крупные единицы: 1 килоньютон – 1 кН, 1 меганьютон – 1 МН.
Наиболее простой пример силы – сила тяжести, которую принято обозначать заглавной буквой G. Это хорошо согласуется с тем, что она порождена ускорением свободного падения, которое обозначается строчной буквой g латинского алфавита.
На рис. 1.1, а изображен шар 2, подвешенный на нити 1. Сила тяжести G приложена в точке О и направлена вертикально вниз. На рис. 1.1, б изображен груз 3, лежащий на плоскости 4. К грузу в точке С приложена сила F, направленная под углом к горизонту и плоскости 4. На рис.1.1, в изображен молоток 5, бьющий по наковальне 6. Сила F приложена к наковальне в точке О и направлена вертикально вниз.
7
Если несколько сил приложены к телу в разных плоскостях в разные стороны, то такая система сил называется пространственной. Если линии действия сил лежат в одной плоскости, то система называется
плоской.
Если линии действия сил, приложенных к телу, пересекаются в одной точке, то такая система сил называется сходящейся, или системой сходящихся сил. Если линии действия всех сил параллельны друг другу, то такая система называется системой параллельных сил.
Одна сила, эквивалентная всей системе приложенных к телу сил, называется равнодействующей. Эквивалентная - значит, оказывающая одинаковое действие на тело. Силу, равную по величине равнодействующей, но направленную по той же линии действия в обратную сторону, называют уравновешивающей силой.
Если на тело действует система сил, то тело движется в направлении действия равнодействующей. Если к телу приложена система сил и к нему приложить уравновешивающую силу, то система сил будет находиться в равновесии, а тело – в покое.
1.1.4.Аксиомы статики
Аксиомы статики устанавливают основные свойства сил, приложенных к абсолютно твердому телу. Аксиомы – это теоремы, принятые без доказательства, которые основаны на опыте, накопленном человечеством в течение длительного периода времени.
Аксиома 1 (закон инерции Галилея). Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно.
Такое движение называют движением по инерции ( от латинского слова inertia – бездеятельность). Вывести материальную точку из этого состояния могут неуравновешенные силы (или сила), которые нужно приложить к материальной точке. Состояние покоя или движение по инерции называют равновесием. При этом сумма всех сил, действующих на тело, равна нулю. Все мы ощущаем комфортно движение по инерции, когда автобус или троллейбус движется равномерно и прямолинейно. В этом случае сила тяги мотора уравновешивает силы сопротивления движения. На нее не действуют никакие силы, а за окном проплывают пейзажи.
Как только водитель затормозит автобус или троллейбус, уравновешенная сила тяги заменится противоположно направленной силой трения тормозов, состояние покоя нарушится. В случае разгона автобуса или троллейбуса сила тяги мотора превышает силу сопротивления и состояния покоя также не наблюдается.

9
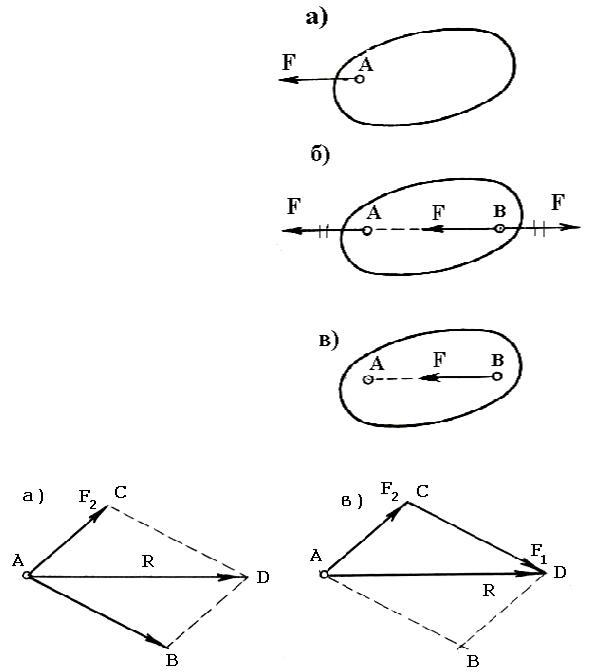
Аксиома 4 (правило параллелограмма). Равнодействующая двух сил, приложенная в одной точке, изображается диагональю параллелограмма, построенного на векторах этих сил.
Эта аксиома является основной для сложения сил. Равнодействующей двух сил F1 и F2 (рис. 1.5, а), приложенных в точке А, будет сила R, которая
является |
|
|
диагональю |
параллелограмма |
ABDC, |
||
построенного на векторах сил F1 |
|||
и |
F2. |
|
Определение |
равнодействующей двух сил по |
|||
правилу |
|
параллелограмма |
|
называется |
векторным или |
||
геометрическим |
сложением и |
||
выражается |
|
векторным |
|
уравнением |
|
Рис. 1.4 |
|
Рис.1.5
F1 + F2 = R . |
(1.1) |
При графическом определении равнодействующей двух сил можно пользоваться правилом треугольника, которое вытекает из правила параллелограмма. К концу вектора F2, приложенному в точке А (рис. 1.5, б), пристраиваем вектор F1 в точке C, т.е. переносим вектор F1 из положения AB в положение CD. От этого параллелограмм не изменится и его диагональ останется на месте. Равнодействующая R также будет диагональю параллелограмма, но одновременно она будет стороной
10
треугольника ACD. На основании аксиомы 4 одну силу R можно заменить двумя силами F1 и F2. Такая замена называется разложением силы на две составляющие и часто используется при решении задач механики.
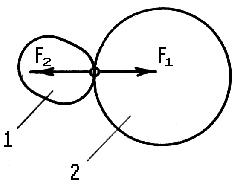
Аксиома 5 (закон действия и противодействия). Силы взаимодействия двух твердых тел друг на друга равны по модулю и направлены в противоположные стороны. Эта аксиома фундаментальная. Она объясняет происхождение механических сил вообще. Силы возникают при взаимодействии твердых тел друг на друга.
Тело 1 (рис. 1.6) действует на тело 2 силой F1, а тело 2 действует на тело 1 силой F2. При этом F1 = F2. Обе силы действуют по одной прямой и направлены в противоположные стороны. Действие (сила F1) и противодействие (сила F2) всегда приложены к различным телам (телу 2 и телу 1).
Рис.1.6
1.2. Связи и их реакции
Свободными телами называют тела, которые не соприкасаются с другими телами и могут свободно двигаться в пространстве в любом направлении. Примерами могут служить снаряд, выпущенный из пушки, планер, запущенный в небо, гладкое тело, скользящее по плоскости, и т.д.
Несвободные тела соприкасаются с другими телами и могут двигаться только в свободном направлении. Например, вагонетка, которая свободно передвигается по рельсам, но только вдоль рельсового пути, а поперек пути ее не пускают реборды на колесах; маятник, который свободно качается на оси; поршень насоса и т.д.
Твердые или гибкие тела, ограничивающие свободу движения несвободного тела, называют связями.
Свободное тело в пространстве обладает шестью степенями свободы (рис. 1.7): x– вдоль оси X; y– вдоль оси Y; z– вдоль оси Z; – вокруг оси X; – вокруг оси Y; – вокруг оси Z.
Если тело ограничено движением в одной плоскости (рис. 1.8), то оно обладает тремя степенями свободы: x, y и z. Если свободному телу на плоскости поставить преграду на пути X, т.е. поставить связь по оси X, то останется только две степени свободы, если поставить две связи, то останется одна степень свободы, если три связи, то тело становится неподвижным и будет находиться в покое.