

1798
.pdf61
направляющая со стойкой 1. Шарнир А и направляющая жёстко соединены со стойкой (станиной), на которой смонтирован весь механизм. Неподвижную стойку принято обозначать цифрой 1.
Кинематическая цепь, в которой при заданном движении одного из звеньев все остальные звенья получают вполне определённые движения, называется механизмом.
В механизме выделяют ведущее звено и ведомое звено. Ведущим называется звено, которому сообщают заданное движение. Ведомым называется звено, которое воспринимает преобразованное механизмом движение ведущего звена. На рис. 4.2 ведущее звено – 2 , ведомое – 4.
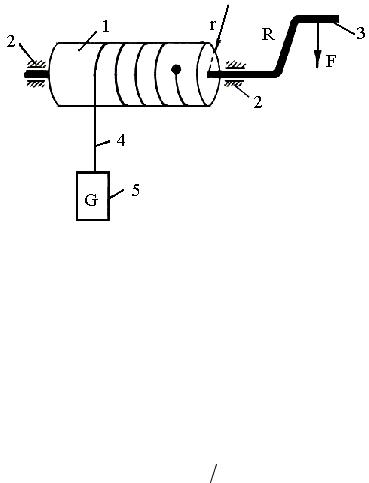
На рис. 4.3 изображён механизм электрической тали. Ведущим звеном механизма является шестерня z1. Ведомым звеном является крюк 5, удерживающий груз 4.
Кинематические пары. Звенья z1 (шестерня) и z2 (зубчатое колесо) соединяются между собой посредством зубьев. Шестерня z1 соединяется со стойкой 1 посредством подшипника. Зубчатое колесо z2 и шестерня z3 посажены жёстко на вал II, который вращается в подшипниках 1. Звенья z3 (шестерня) и z4 (зубчатое колесо) соединяются между собой посредством зубьев. Зубчатое колесо z4 и барабан 2 жёстко посажены на вал III, который вращается в подшипниках 1. На барабан 2 намотан канат 3, на конце которого имеется крюк 5, с помощью которого подвешен груз 4.
Рис.4.3
Ведущая шестерня z1 приводится во вращение электромотором 7, мощность которого N1 и частота вращения n1. С помощью двух пар звеньев z1 – z2 и z3 – z4 частота вращения вала I – n1понижается до частоты n3, с которой вращается вал III. На барабан 2 диаметром D наматывается канат, поднимая груз 4, равный G, со скоростью v.
Как определить скорость подъёма груза v, зная геометрические параметры механизма и частоту вращения ведущего звена z1?
Ниже будут рассмотрены понятия «передаточное отношение» и

62
«передаточное число». Мы воспользуемся этими понятиями для определения частоты вращения ведомого вала. Между I и II валами существует зависимость
n2 n1 z1 z2 .
z2 .
Между II и III валами существует зависимость
n3 n2 z3 z4 , |
или |
n3 n1 z1 |
z2 z3 z4 . |
За 1 оборот барабана 2 канат 3 наматывается на длину окружности, равную D. Следовательно, за n3 оборотов канат будет наматываться за каждую минуту на длину
n D n |
z1 |
|
z3 |
D v, |
|
|||||
|
|
|
|
|
|
|||||
3 |
1 z2 z4 |
|
||||||||
n |
z1 |
|
z3 |
D v. |
(4.1) |
|||||
|
|
|||||||||
1 |
|
z2 z4 |
||||||||
Уравнение (4.1) называется уравнением кинематического баланса,
которое связывает между собой движения ведущего и ведомого звеньев. Уравнение кинематического баланса применяется для
кинематического расчёта и анализа кинематических цепей механизмов. Полезная или эффективная мощность Ne определяется как
произведение веса груза G на скорость его подъёма v:
Ne G · v |
(4.2) |
Коэффициент полезного действия определится как отношение полезной мощности к затраченной двигателем, т.е. N:
=Ne  N .
N .
(4.3)
Откуда определяется затраченная двигателем мощность N:
N Ne  .
.
(4.4)
Кривошипно-шатунный механизм (см. рис.4.2) имеет в качестве ведущего звена кривошип 2, который обозначен на схеме как рычаг с двумя шарнирами на концах А и В. Чаще его выполняют в виде кривошипного диска 5, в центре которого (точка А) и в точке В выполнены шарниры, с помощью которых кривошипный диск (или кривошип 2) подсоединяется к стойке и к шатуну 3.

63
Кривошип 2 вращается с угловой скоростью . За время t кривошип поворачивается из положения B0 на угол , который определится через угловую скорость
= t . |
(4.5) |
В начальный момент времени кривошип занимает положение AB0, а шатун 3 – положение B0C0. Поршень 4 находился в положении C0.
За время t поршень из положения C0 переместился в положение С на расстояние s. Это и есть путь поршня.
Поршень 4 является ведомым звеном, двигающимся со скоростью vc, которая является абсолютной, т.к. измеряется относительно неподвижной стойки 1.
Шатун 3 связан шарниром С с поршнем 4 , следовательно, точка С шатуна движется с абсолютной скоростью vc , т.к. она отсчитывается от неподвижной стойки.
С другой стороны шатун связан шарниром В с кривошипом 2. Скорость vB точки В кривошипа и шатуна тоже абсолютна, т.к. измеряется относительно неподвижной точки А.
Выберем систему координат XAY. Скорость vc совпадает с осью AX. Разложим скорость vB на две составляющие vx и vy. Если теперь рассматривать движение точки В шатуна относительно точки С, то можно прийти к выводу, что точка В движется поступательно вместе с точкой С со скоростью vx = vy, а также вращается вокруг точки С со скоростью vy.
Между скоростями и vc можно установить зависимость:
vB = r; |
vx = vB sin = r sin( t) = vc |
|
|
или |
|
|
(4.6) |
|
|
|
|
|
r sin( t) = vc . |
|
|
Если к поршню приложена сила сопротивления F , то можно |
|||
определить полезную мощность |
(4.7) |
||
|
Ne F vc . |
||
Если известен коэффициент полезного действия, то затраченную |
|||
двигателем мощность определяют по формуле |
|
||
|
N = Ne . |
(4.8) |
|
4.3. Простейшие механизмы
4.3.1.Наклонная плоскость
Наклонная плоскость – простейший и древнейший механизм, применяемый для поднятия тяжёлых предметов на высоту при ручной
64
загрузке и выгрузке вагонов, грузовых автомобилей, в винтовых парах, клиновых механизмах и т.д.
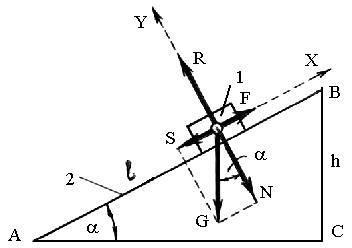
Сила F (рис. 4.4), с которой затаскивают груз 1 по наклонной плоскости 2 в транспортную машину, зависит от величины груза G , угла подъёма .
Разложим силу веса G на две составляющие: силу N перпендикулярно к наклонной плоскости, т.е. по нормали к ней, и параллельно наклонной плоскости силу S.
Рис.4.4
Сила N прижимает груз 1 к наклонной плоскости (вспомните ледяную горку), а сила S стремится двигать груз 1 вниз по наклонной плоскости. Наклонная плоскость в ответ на силу N создаёт реакцию плоскости R, которая уравновешивает силу N. Чтобы груз не поехал вниз, нужно приложить силу F , которая уравновесит силу S.
Выберем систему координат XOY.Ось X направим вдоль наклонной плоскости, а ось Y перпендикулярно к ней. Сила S является проекцией силы G на ось X.
S = G sin . |
(4.9) |
Сила F уравновешивает силу S , следовательно,
F = S = G sin . |
(4.10) |
Чтобы поднять груз вертикально от уровня точки А до уровня точки В, т.е. на высоту h , нужно совершить работу
A = G h. |
(4.11) |
Если поднимать груз по наклонной плоскости от точки А до точки |
|
В, то, пренебрегая трением, работа будет равна |
|
A = F e. |
(4.12) |
Нетрудно увидеть, что работа в формуле (4.11) равна работе в формуле (4.12), т.к. в обоих случаях груз был поднят на одну и ту же высоту h. Только в первом случае путь был меньше и равнялся h, а сила была больше и равнялась G. Во втором случае путь был длиннее и равнялся e, а сила была меньше и равнялась F.

65
Во сколько же раз сила F меньше силы веса G ? Приравняем правые части уравнений (4.11) и (4.12):
G h = F e.
Это уравнение выражает закон равенства работ для наклонной плоскости, откуда
F |
|
h |
sin . |
(4.13) |
|
|
|||
G e |
|
|||
Во сколько раз путь по наклонной плоскости e больше высоты подъёма h , во столько раз сила F меньше силы веса G.
Когда мы не в состоянии вертикально поднять груз, применяется наклонная плоскость, которая позволяет поднять тяжёлый груз малой силой. При этом мы совершаем больший путь.
В работе механизмов выигрыш в силе всегда равен проигрышу в
пути.
Это золотое правило механики. На основе этого правила действуют многие машины.
Из уравнения (4.13) находим
F = G sin ,
что соответствует равенству (4.10), следовательно, наши рассуждения правильные.
Мужчина-рабочий в течение дня может нагружаться силой не более 20 кгс 200 Н. Под каким углом нужно поставить наклонную плоскость и какой длины выбрать направляющие, если вес груза G = 1000 Н = 1кН, а высота подъема h = 1,5 м?
Р е ш е н и е
Из формулы (4.13)
sin = F = 200 = 0,2;
|
G |
1000 |
|
||
угол = arcsin 0,2 = 11,5 . |
|
|
|
|
|
Из формулы (4.13) |
|
|
|
|
|
e= |
h |
|
|
1,5 |
= 7,5 м, |
|
|
|
|||
sin 0,2
следовательно, длина наклонной плоскости должна быть равной 7,5 м.
4.3.2.Рычаги
Если нужно приподнять тяжёлый предмет весом G малой силой F, то применяют рычаг. Распространённым рычагом, с помощью которого приподнимают тяжёлые предметы, является лом.
Рычагом называется длинное твёрдое тело, вращающееся вокруг неподвижной оси.

66
Различают рычаги одноплечные и двуплечные.
Уодноплечного рычага ось вращения расположена на одном из концов, а силы, действующие на рычаг, антипараллельны, т.е. параллельны
инаправлены в разные стороны (рис. 4.5).
Удвуплечного рычага ось расположена между точками приложения сил и силы параллельны (рис. 4.6).
На рисунках обозначены:G – нагрузка; F – сила, уравновешиваю-
щая нагрузку; 1 |
- плечо нагрузки G; 2 - плечо силы F. |
Чтобы рычаг находился в покое, т.е. был уравновешен, сумма моментов относительно оси вращения А должна быть равна нулю:
Рис.4.5 |
|
|
|
Рис.4.6 |
||
MA G e1 F e2 0, |
||||||
откуда |
|
|
|
|
||
G 1 F 2 |
(4.14) |
|||||
или |
|
|
|
|
||
|
G |
|
|
2 |
. |
(4.15) |
|
|
|
|
|||
|
F |
|
1 |
|
||
Сила F , приложенная к рычагу , во столько раз меньше нагрузки G, во сколько раз плечо силы 2 больше плеча нагрузки 1.
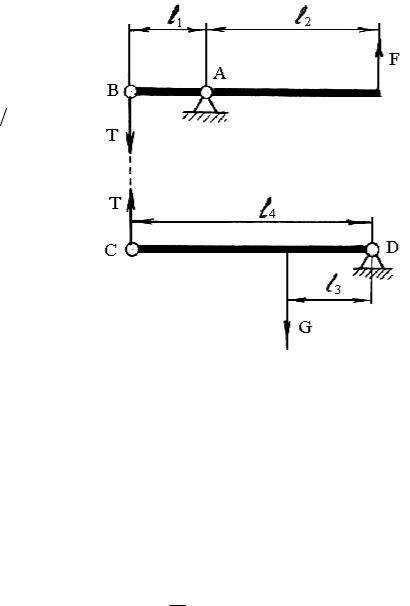
Для получения большого выигрыша в силе применяют систему рычагов (рис. 4.7). Двуплечный рычаг нагружен силой F. Точка В двуплечного рычага соединена канатом с точкой С одноплечного рычага. Через канат на одноплечный рычаг передаётся сила Т, которая поднимает нагрузку G.
Сила Т определится по формуле
Т = F 1 2 .
2 .
Нагрузка G находится по формуле
G = T 4  3 .
3 .
Если в эту формулу подставить значение Т, то получим
|
|
|
|
|
|
|
|
|
|
67 |
|
|
|
|
|
|
|
|
|
|
|
G = F |
2 |
|
4 |
. |
(4.16) |
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
3 |
||
Если 1 |
3 , а 2 |
4 , то |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
G = F |
|
. |
(4.17) |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||
Выбрав |
|
|
рычаги |
с |
|
|
|
|
|
|
|
||||
отношением |
плеч |
2 1 = 3 |
, |
|
|
|
|
|
|
|
|||||
получим |
для |
|
одного |
рычага |
|
|
|
|
|
|
|
||||
выигрыш в силе в 3 раза и для |
|
|
|
|
|
|
|
||||||||
системы двух рычагов - в 32 = 9 |
|
|
|
|
|
|
|
||||||||
раз! А если применить три |
|
|
|
|
|
|
|
||||||||
рычага, то выигрыш получим в 33 |
|
|
|
|
|
|
|
||||||||
= 27 раз!! |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Сложные |
|
системы |
|
|
|
|
|
|
|
||||||
рычагов |
дают |
значительный |
|
|
|
|
|
|
|
||||||
выигрыш в силе. Одну из таких |
|
|
|
|
|
|
|
||||||||
систем |
используют |
для |
|
|
|
|
|
|
|
||||||
взвешивания |
|
больших |
грузов: |
|
|
|
|
|
|
|
|||||
автомобилей, вагонов и др. |
|
|
|
|
|
|
|
|
Рис.4.7 |
||||||
В этом случае огромный |
|
|
|
|
|
|
|
|
|
|
|||||
вес G автомобиля или вагона уравновешивается маленьким весом гири F: |
|||||||||||||||
|
|
|
|
|
|
|
|
|
2 |
n |
|
|
|
|
|
|
|
|
|
|
|
G F |
|
|
|
|
|
|
(4.18) |
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
1 |
, |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
где n – показатель степени, указывающей число рычагов в системе. Пусть вес автомобиля с грузом составляет 6 т, что в системе СИ
составляет 60 кН. Какую гирю нужно положить, чтобы уравновесить вес автомобиля, если отношение длин рычагов l2 5, а число рычагов – 4?
|
|
G |
|
|
60000 |
|
60000 |
l1 |
||
F |
|
|
|
|
96 Н = 9,6 кгс. |
|||||
|
|
|
|
n |
5 4 |
|
||||
|
|
|
2 |
|
|
625 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
2 |
|
n |
|
|
|
Отношение плеч рычагов выбирают таким, чтобы |
|
|
|
|
было кратно 10, |
||||||
|
|
|
|||||||||
|
1 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
2 |
|
|
|
|
|
2 |
4 |
|
|
|
|
5,62,то |
|
|
|
|
1000. Тогда |
||||
100 или 1000. Например, если выбрать |
|
|
|
|
|||||||
|
|
|
|
|
|
||||||
|
|
1 |
|
|
|
|
1 |
|
|
||
68
при взвешивании автомобиля весом 6 т на весы нужно будет положить гирю массой 6 кг.
4.3.3.Ворот, блоки и полиспасты
Кразновидностям рычагов относятся ворот, блоки и полиспасты.
Рис.4.8
Ворот – это цилиндрический барабан 1, установленный на подшипниках 2 и снабженный рычагом 3 для вращения барабана. Примером может служить колодезный ворот. При вращении рычага 3 канат 4 наматывается на ворот 1 (барабан) и груз 5 поднимается. Плечо рычага R делает больше радиуса ворота r, чтобы получить выигрыш в силе.
Из равенства моментов, приложенных к вороту и рычагу
G r F R ,
находим |
|
G F R r. |
(4.19) |
Сила F1, приложенная к рычагу ворота, во столько раз меньше поднимаемого груза G, во сколько раз плечо рычага R больше радиуса ворота r.
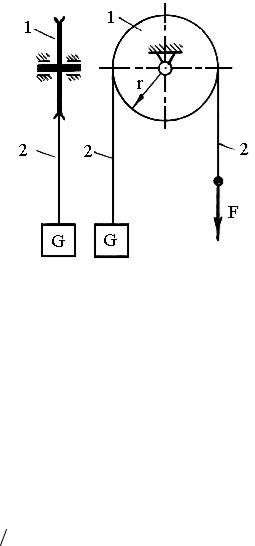
Блок 1 представляет собой колесо (рис. 4.9), на ободе которого имеется желобок, в котором помещается канат 2, огибающий блок.
К одному концу каната крепят груз G, а к другому прикладывают силу F. Так как ось закреплена, блок называют неподвижным. Он может только вращаться вокруг своей оси.
Условие равновесия блока
G r F r ,или G = F.
Выигрыша в силе у неподвижного блока нет. Канат растягивается одной и той же силой. Это правило присуще для всех схем с блоками и канатами.
69
Рассмотрим схему подвижного блока с неподвижным (рис. 4.10, а).
Подвижный блок отличается от неподвижного тем, что ось его не закреплена и он может перемещаться вместе с осью. Подвижный блок 1 висит на двух ветвях каната 2, который огибает его снизу. Далее канат 2 огибает неподвижный блок 3, установленный на неподвижной оси 4. Один конец каната прикреплен к опоре 5, а за другой конец тянут его силой F. Груз 6 крепится к крюку 7, который прикреплен к оси
Рис.4.9
подвижного блока 1. Из рисунка видно, что груз 6 вместе с блоком 1 висит на двух ветвях каната. Составим расчетную схему (рис. 4.10, б). Для этого освободим блоки (тела) от связей, т.е. канатов, и заменим связи реакциями. Так как сила натяжения всего каната едина и равна силе F, то реакции связей будут равны силе F.
Рассмотрим равновесие блока 1 (рис. 4.10, б). Все силы действуют вертикально, поэтому на горизонтальную ось они проектируются в нуль. Груз G обычно задан, поэтому количество неизвестных равно одному, т.е. силе F. Достаточно составить уравнение равновесия
2 F = G, или F G 2. |
(4.20) |
Выигрыш в силе получается в два раза.
Полиспаст состоит из группы неподвижных блоков 1 и группы подвижных блоков 2. Канат 3 закрепляют одним своим концом к неподвижной группе блоков в точке А. Затем он пропускается через первый блок подвижной группы, через первый блок неподвижной группы и т.д. Второй конец каната, переброшенный через последний блок неподвижной группы, опускается вниз и к нему в точке В прикладывается сила F.
Груз подвешен к группе подвижных блоков 2, которая висит на
3 2 = 6 ,
т.е. шести канатах: три блока по два каната получается шесть. Уравнение равновесия будет иметь вид
G = 2 3 F. |
(4.21) |
Если число подвижных блоков в полиспасте обозначить буквой n, |
|
число канатов будет равно 2n, тогда уравнение примет вид |
|
G = 2 n F |
(4.22) |
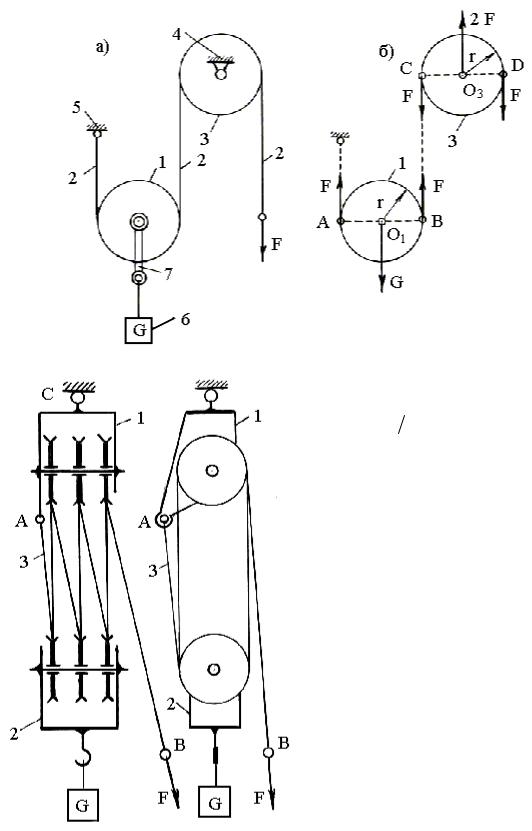
70
Рис.4.10
или
F G 2n. |
(4.23) |
Итак, если число подвижных блоков равно 3, то выигрыш в силе равен 6.
Рис.4.11