

1798
.pdf51
Эта работа является затраченной электрической энергией, которую принято исчислять в киловатт-часах.
1кВт ч 3,6 106 Дж.
Трактор при вспашке помимо переворачивания земли вынужден затрачивать работу и мощность на вращение коробки скоростей, перемещение самого себя, излучение тепловой энергии и т.д. Как видно, кроме полезной работы совершается работа, не затрачиваемая непосредственно на переворачивание земли, то есть вредная работа.
Затраты энергии принято делить на полезную работу или мощность и потери.
Для оценки полезной работы или мощности введено понятие
коэффициент полезного действия.
Коэффициентом полезного действия (КПД) называется отношение полезной работы (мощности) ко всей затраченной.
Полезную мощность принято называть эффективной и обозначать
Ne , тогда КПД определяется по формуле
Ne N . |
(3.18) |
Если мощность от двигателя передается через несколько механизмов к рабочему органу, КПД которых известны, то общий КПД машины
1 2 3 ... n |
(3.19) |
равен произведению отдельных КПД.
КПД всегда меньше 1 и тем больше, чем меньше мощностьN N Ne, затрачиваемая на преодоление вредных сопротивлений.
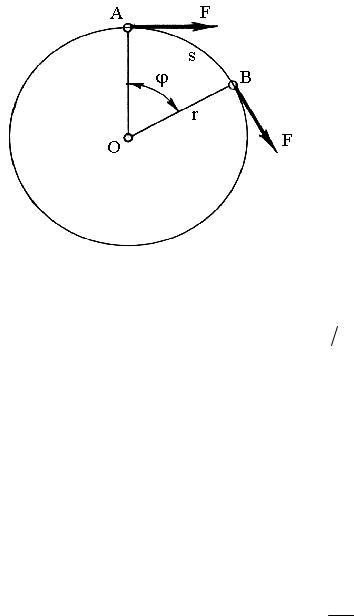
3.2.3. Работа и мощность при вращательном движении
При движении по окружности сила F совершает работу
А F AB F s F r .
Произведение F r называют вращающим моментом
M = F r.
Тогда работа будет равна
A = M .
(3.20)
(3.21)
(3.22)
52 |
|
|
|
|
|
|
Мощность |
вращательного |
|||||
движения |
|
|
|
|
||
N |
A |
M |
|
M . |
(3.23) |
|
t |
t |
|||||
|
|
|
||||
В технике угловую скорость принято измерять в об/мин (см.
формулу (2.26)).
|
n |
|
n |
. |
(3.24) |
|
9,55 |
||||
30 |
|
|
|||
Рис.3.8
Зная N и n, можно определить момент
M 9.55N n , |
(3.25) |
где N – в Вт; М – в Н м; – в с-1 ; n – в об/мин.
3.3.Динамика материальной точки
3.3.1.Закон количества движения
Если на материальную точку массой m, находящуюся в покое, начинает действовать сила F, то через t(с) ее скорость будет равна
v a t, откуда a v t .
t .
Подставив значения ускорения в основное уравнение динамики, получим
F ma mv . t
Откуда |
|
F t m v. |
(3.26) |
Произведение вектора постоянной силы F на время действия силы t есть величина векторная, называется импульсом силы и обозначается S:
S F t. |
(3.27) |
Произведение массы материальной точки на вектор скорости mv есть величина векторная и называется количеством движения.
Физический смысл: импульс силы – это толчок, создаваемый силой за время t; количество движения – это мера механического движения.
53
Количество движения, отнесенное ко времени, представляет собой
силу.
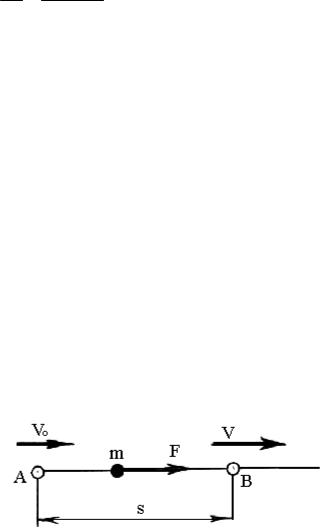
Рассмотрим движение материальной точки из положения А в положение В, которое она проходит за время t. В начальном положении А время t0 = 0; скорость – v0. Ускорение на участке АВ определяется как отношение приращения скорости t, деленной на время t:
a v (v v0 ). t t
Если это значение скорости подставим в основное уравнение динамики, то получим
Ft m(v v0 ), |
|
или |
|
Ft mv mv0, |
(3.28) |
или |
|
S mv mv0. |
(3.29) |
Алгебраическое приращение количества движения материальной точки за время t равно импульсу действующей силы за тот же промежуток времени.
Это есть закон изменения количества движения. Пользуясь им,
можно решать задачи по определению силы, времени ее действия, массы, начальной и конечной скорости при условии, что только одна из этих величин неизвестна.
При решении задач, если в условиях задается масса, скорость и время движения, нужно пользоваться законом об изменении количества движения, а не кинетической энергии.
Рис.3.9
3.3.2.Потенциальная и кинетическая энергия
Энергией называется способность тела совершать механическую работу. Существует два вида энергии: потенциальная и кинетическая.
Потенциальная энергия представляет собой запас работы, которую может совершать тело. Название «потенциальная» происходит от латинского «потенция», т.е. возможность.

54
Например, тело весом G подняли на высоту h и удерживают его на этой высоте. На подъем тела затратили работу A = G h , которая и равна потенциальной энергии
П G h. |
(3.30) |
Если теперь отпустить тело, соединив его с механизмом, то оно может совершить работу. Так работает кузнечный молот или молот для забивания свай при подготовке фундамента дома.
Аналогично обладает потенциальной энергией сжатая пружина, электрическое, магнитное, гравитационное поля и т.д.
Во всех перечисленных случаях можно заметить два момента: вопервых, потенциальная энергия не возникает из ничего, а является продуктом проделанной работы (поднятие тела на высоту h, сжатие пружины, создание магнитного поля и т.д.); вовторых, потенциальная энергия зависит от положения тела в силовом поле.
Потенциальная энергия может совершать статическую работу или переходить из одного вида энергии в другой. Например, пневмоцилиндр закрывает двери в троллейбусе (статическая работа); сжатый воздух в пневматическом ружье, применяемом в тире, сообщает пуле кинетическую энергию (переходит из потенциальной в кинетическую энергию).
Кинетическая энергия – это энергия движущегося тела. Кинетическая энергия определяется способностью движущегося тела или материальной точки совершать работу. Например, если пневматическое ружье поднять вверх и выстрелить, то кинетическая энергия, сообщенная пуле, будет совершать работу по поднятию пули на высоту h.
Величина кинетической энергии численно равна полупроизведению массы материальной точки на квадрат скорости
E mv2 2 . |
(3.31) |
3.3.3.Закон об изменении кинетической энергии материальной точки
Воспользуемся рис. 3.9. Сила F на участке АВ совершает работу
A F s ma s. |
(3.32) |
При равноускоренном движении ускорение равно приращению скорости, деленному на время (2.13, а):
a v v0 . t
Путь, пройденный материальной точкой при равноускоренном движении, равен произведению средней скорости на время (2.13, б):
|
|
|
|
|
|
55 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s vcp t |
v v0 |
t. |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Подставив значения a и s в уравнение (3.32), получим |
|||||||||||||||||||||
|
v v |
0 |
|
|
v v |
0 |
|
|
v2 v2 |
|
mv2 |
|
mv2 |
||||||||
A m |
|
|
|
|
t m |
|
|
0 |
|
|
|
|
|
|
0 |
, |
|||||
t |
|
2 |
|
2 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
2 |
2 |
|
|
|||||||||
или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
(3.33) |
||
|
|
|
|
|
|
|
|
|
|
mv |
2 |
|
|
|
|
|
|
||||
|
|
|
|
A E E0 |
|
|
|
mv0 |
, |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
|
||
где E – кинетическая энергия в положении В; Е0 – кинетическая энергия в положении А.
Изменение кинетической энергии материальной точки равно работе силы, действующей на точку.
Это есть закон об изменении кинетической энергии. При движении материальной точки под действием силы F сила совершает работу, которая затрачивается на создание ускорения, то есть изменение скорости точки.
Потенциальная работа силы F переходит в кинетическую энергию движущейся точки. Кинетическая энергия увеличивается за счет увеличения скорости.
Если скорость v в положении В больше скорости v0 в положении А, то работа, совершаемая силой F, положительная, а кинетическая энергия Е и скорость v возрастают. Потенциальная работа силы F переходит в кинетическую энергию.
Если v v0, то работа А отрицательная, а Е и v убывают. При этом часть кинетической энергии, которая «высвобождается», совершает механическую работу, то есть материальная точка, преодолевая какое-то сопротивление (сила F), совершает работу.
Например, молоток под действием силы F1 руки человека на некотором пути s1 получает запас кинетической энергии до встречи со шляпкой гвоздя:
A F s |
|
mv |
2 |
. |
|
2 |
|
||||
1 |
1 |
|
|
|
|
При встрече со шляпкой гвоздя молоток испытывает сопротивление F2, которое он преодолевает, забивая гвоздь на глубину s2. При этом скорость v убывает до нуля, а кинетическая энергия молотка переходит в работу, которая затрачивается на сопротивление гвоздя F2 на пути s2 .
56
|
mv |
2 |
F |
s |
2 |
A. |
|
|
|
|
|
|
|
|
|
|
|||||
2 |
2 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
В первом случае начальная скорость v0 = 0 и v |
v0, а |
mv |
2 |
– |
||||||
2 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
положительная и А – положительная, т.к. сила F1 направлена в сторону движения.
Во втором случае начальная скорость v02 v, а конечная скорость равнялась нулю, поэтому кинетическая энергия отрицательная. Работа А тоже отрицательная, т.к. сила F2 направлена в сторону, противоположную движению.
Знак кинетической энергии определяется разностью v2 v02. Поэтому при разгоне приращение кинетической энергии
Е Е Е0 0 ,
т.е. положительно, а при вынужденном торможении
Е Е Е0 0 ,
т.е. отрицательно. Поэтому говорят, что кинетическая энергия при разгоне возрастает (Е > Е0), а при торможении убывает (E < E0).
При решении задач, если задается масса, скорость и путь материальной точки, нужно пользоваться законом об изменении кинетической энергии.
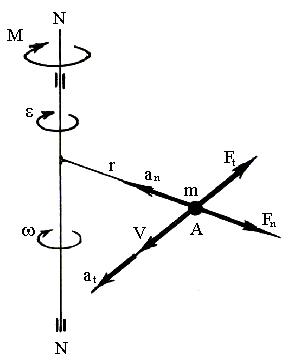
3.3.4.Основное уравнение динамики для вращательного движения
Пусть ось N – N под действием момента М вращается с ускорением . На расстоянии ОА = r от оси прикреплена материальная точка массой m.
При равноускоренном вращении материальной точки возникают ускорения:
тангенциальное
аt = r ;
нормальное
аn = 2 r ,
которые вызывают силы инерции: тангенциальную
Ft at m mr ,
нормальную
Fn anm mr 2 .
57
Касательная сила инерции Ft уравновешивает внешний момент М. На основании принципа Даламбера составим уравнение равновесия моментов
M M Ft r M mr2 0, (3.34)
откуда
M (mr2 ).
Величина I = mr2 называется
моментом инерции материальной точки относительно оси и является мерой инертности при вращательном движении. С учетом момента инерции основной закон динамики для вращательного движения примет вид
M= ·I . |
(3.35) |
Для вращающегося |
тела |
момент инерции определяется как
n |
Рис.3.10 |
|
|
I= miri2 , |
(3.36) |
i 1
где mi – масса i-го элемента; ri – расстояние центра тяжести i-го элемента тела от оси N – N.
Если к телу приложено много внешних моментов от внешних сил, то равнодействующий момент
n |
n |
(3.37) |
MMi Fi ri .
i 1 i 1
Произведение момента инерции тела I на его угловое ускорение равно сумме моментов всех сил относительно оси вращения
n |
n |
(3.38) |
Mi Firi I .
i 1 i 1
При решении задач наиболее часто встречаются тела в виде цилиндра или шара.
Момент инерции сплошного цилиндра радиусом r и массой m, вращающегося относительно своей оси,

58
I mr2 md2
2 8
где d – диаметр цилиндра.
Момент инерции шара радиусом r, оси симметрии,
, (3.39)
вращающегося относительно
|
mr |
2 |
0,4mr2 |
(3.40) |
I |
|
0,1md2 . |
||
|
|
2,5
3.3.5.Кинетическая энергия вращающегося тела
Кинетическая энергия материальной точки (рис. 3.10)
E |
mv2 |
m( r)2 |
2 |
mr |
2 |
|
I |
2 |
|
|||
|
|
|
|
|
|
|
|
|
, |
|||
2 |
2 |
|
|
2 |
|
|||||||
или |
|
|
2 |
|
|
|
|
|
||||
|
|
E=I 2 |
|
|
|
|
|
|
(3.41) |
|||
|
|
|
2. |
|
|
|
|
|||||
Закон изменения кинетической энергии вращающегося тела по аналогии с поступательным движением запишется в следующем виде:
A |
I 2 |
|
I |
02 |
(3.42) |
|
|
|
. |
||
|
|
|
|||
2 |
2 |
|
|
||
Изменение кинетической энергии вращающегося тела равно работе сил, приложенных к телу.
Работа при вращательном движении по аналогии с поступательным движением определяется как произведение «силы», т.е. момента М, на «путь», т.е. угол поворота :
|
А = М . |
|
|
|
(3.43) |
|||
Движущиеся машины обладают двумя видами кинетической |
||||||||
энергии: |
кинетической энергией |
поступательно движущейся |
машины |
|||||
E mv2 2 |
и кинетической энергией вращающихся частей |
E I 2 2, |
||||||
поэтому полная кинетическая энергия машины равна их сумме: |
|
|||||||
|
E E E |
|
|
mv2 |
|
I 2 |
. |
(3.44) |
|
1 |
2 |
2 |
2 |
|
|
||
|
|
|
|
|
||||

59
Часть II. ОСНОВЫ ТЕОРИИ МЕХАНИЗМОВ И МАШИН
4.ОСНОВНЫЕ ПОНЯТИЯ О МЕХАНИЗМАХ И МАШИНАХ
4.1.Общие сведения о машинах
Машиной называется (механическое) устройство, выполняющее полезную работу.
Работа может быть связана с производственным процессом, транспортированием, преобразованием энергии, преобразованием информации и т.д. Например, экскаватор, подъёмный кран, автомобиль, воздушный компрессор, насосная установка, ЭВМ и т.д.
Машина состоит из трёх основных частей: приводного двигателя – 1; передачи – 2; рабочего органа – 3 .
Рабочий орган машины совершает полезную работу. Для этого ему нужно сообщать энергию и заданные скорость движения и траекторию. Примеры : ковш экскаватора, крюк крана, колёса автомобиля, поршень компрессора, рабочее колесо насоса и т.д.
Передача предназначена для преобразования движения, согласования скорости двигателя и рабочего органа и передачи энергии от двигателя к рабочему органу. У автомобиля – это коробка передач и трансмиссия, у крана – редуктор и канатная передача.
Передача механической машины представляет собой чаще всего механизм вращательного движения, состоящий из отдельных двухваловых механизмов, которые тоже называются передачами: ременная передача, цепная передача, зубчатая передача, червячная передача, канатная передача и т.д. Эти передачи вращательного движения состоят из двух звеньев: ведущего звена, получающего вращательное движение от двигателя, и ведомого звена, приводимого в движение от ведущего.
По характеру выполняемой работы различают машины: 1.Технологические – для выполнения производственных процессов и
выпуска готовой продукции: станки, текстильные, полиграфические, сельскохозяйственные машины и т.д.
2.Транспортные – для перемещения грузов и перевозки пассажиров: поезда, автомобили, транспортёры, конвейеры, насосы для перекачки жидкостей и т.д.
3.Грузоподъёмные – для подъёма грузов и тяжёлых предметов: краны, тали, домкраты и др.
60
4.Энергетические – для преобразования механической энергии в другие виды энергии, и наоборот. Первые называют генераторами, а другие двигателями: электрогенераторы, компрессоры, электродвигатели, двигатели внутреннего сгорания и т.д.
5.Электронно-вычислительные машины (ЭВМ) – для преобразования и накопления информации.
4.2. Кинематические пары и кинематические цепи
Механизм – это совокупность, которая состоит из неподвижных и подвижных деталей, которые называют звеньями.
Два звена, которые соединены между собой подвижно с помощью шарнира, поступательной направляющей или другим способом, образуют
кинематическую пару.
Примеры. Ножницы образуют вращательную кинематическую пару. Шприц, состоящий из поршня и цилиндра, образует поступательную кинематическую пару, винт и гайка винтовую кинематическую пару.
Последовательное соединение звеньев, которые образуют между собой кинематические пары, называют кинематической цепью.
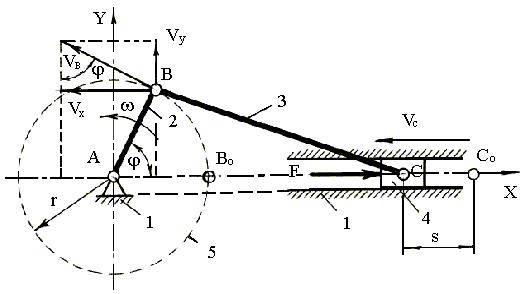
Рассмотрим кинематическую цепь кривошипно-шатунного механизма (рис. 4.2).
Неподвижные звенья 1 соединены между собой в единый корпус, который называется стойкой, станиной.
Кинематические цепи, крайние звенья которых соединены вместе, называются замкнутыми.
Рис.4.2
Схема последовательного соединения звеньев кинематической цепи: стойка с шарниром 1 – кривошип 2 – шатун 3 – ползун 4 –