

§ 4. Примеры вычисления потенциальной энергии и работы
сил.
1.
Потенциальная энергия силы тяжести
вблизи поверхности Земли. В большинстве
технических задач можно считать
поверхность Земли плоской, а силы
тяжести, являющиеся результатом
притяжения тел Землей, направленными
по вертикали вниз и не изменяющимися
в различных точках околоземного
пространства. Рассмотрим отдельную
тяжелую точку; для нее
![]() (ось z
направлена по вертикали вверх) и
элементарная работа определится
выражением:
(ось z
направлена по вертикали вверх) и
элементарная работа определится
выражением:
![]() ,
где Р
- сила тяжести (вес) рассматриваемой
точки. С другой стороны, по уравнению
(121), имеем
,
где Р
- сила тяжести (вес) рассматриваемой
точки. С другой стороны, по уравнению
(121), имеем
![]() .
Таким образом, dП
= Pdz = d(Pz) и
потенциальная энергия силы тяжести
представляется формулой П = Pz
+ С. Для
системы N
тяжелых точек элементарная работа
найдется суммированием отдельных
элементарных работ сил тяжести точек
системы
.
Таким образом, dП
= Pdz = d(Pz) и
потенциальная энергия силы тяжести
представляется формулой П = Pz
+ С. Для
системы N
тяжелых точек элементарная работа
найдется суммированием отдельных
элементарных работ сил тяжести точек
системы
 .
.
И
в этом случае П =
![]() .
Здесь Р
- общий вес системы, a
.
Здесь Р
- общий вес системы, a
![]() -
координата ее центра тяжести.
-
координата ее центра тяжести.
2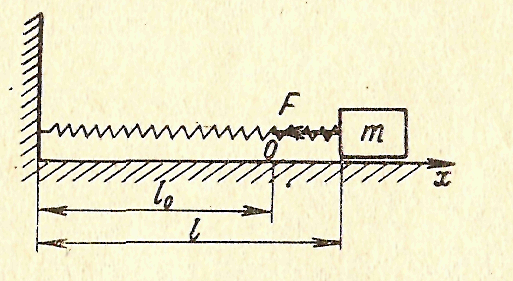 .
Потенциальная энергия упругой деформации.
Здесь будет исследован случай линейной
теории упругости, когда материал
подчиняется закону Гука. Рассмотрим
упругую пружину длины
.
Потенциальная энергия упругой деформации.
Здесь будет исследован случай линейной
теории упругости, когда материал
подчиняется закону Гука. Рассмотрим
упругую пружину длины
![]() ,
один конец которой закреплен неподвижно
(рис 62), а к другому подвижному концу
прикреплена точка массы
;
при растяжении (или сжатии) пружины ее
длина будет равна
,
один конец которой закреплен неподвижно
(рис 62), а к другому подвижному концу
прикреплена точка массы
;
при растяжении (или сжатии) пружины ее
длина будет равна
![]() ,
а на массу
действует сила, пропорциональная
удлинению Рис
62
,
а на массу
действует сила, пропорциональная
удлинению Рис
62
пружины
![]() .
Помещая начало координат на конце
недеформированной пружины, направим
ось х
по движению массы
;
обозначая через с
коэффициент
жесткости пружины, имеем
.
Помещая начало координат на конце
недеформированной пружины, направим
ось х
по движению массы
;
обозначая через с
коэффициент
жесткости пружины, имеем
Fx =- сx, Fy = Fz = 0,
но
![]() ,
откуда, интегрируя, получаем
,
откуда, интегрируя, получаем
 (3.93)
(3.93)
П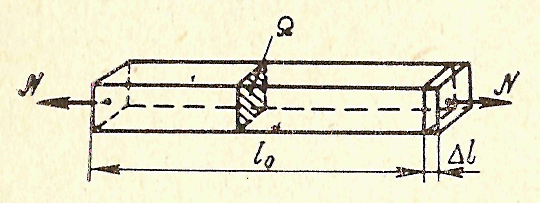 роизвольная
постоянная в выражении (3.93) отброшена,
так как потенциальная энергия деформации
недеформированной пружины, естественно,
принимается равной нулю. В эту же схему
укладывается решение задачи о продольной
деформации (растяжении или сжатии)
призматического стержня. Появляющиеся
при нагружении стержня Рис
63
роизвольная
постоянная в выражении (3.93) отброшена,
так как потенциальная энергия деформации
недеформированной пружины, естественно,
принимается равной нулю. В эту же схему
укладывается решение задачи о продольной
деформации (растяжении или сжатии)
призматического стержня. Появляющиеся
при нагружении стержня Рис
63
продольными
силами N нормальные напряжения
 пропорциональны относительному
удлинению
пропорциональны относительному
удлинению
![]() ;
здесь Ω - площадь попереч ного сечения,
-
первоначальная длина стержня. Коэффициентом
пропорциональности служит модуль
нормальной упругости (модуль Юнга) Е,
поэтому
;
здесь Ω - площадь попереч ного сечения,
-
первоначальная длина стержня. Коэффициентом
пропорциональности служит модуль
нормальной упругости (модуль Юнга) Е,
поэтому
 ,
и, таким образом, упругая сила, с которой
деформированный стержень действует
на прикрепленную к его концу массу,
будет определяться формулой
,
и, таким образом, упругая сила, с которой
деформированный стержень действует
на прикрепленную к его концу массу,
будет определяться формулой

Координатой
х
здесь является удлинение стержня
![]() ,
и коэффициент жесткости с,
входящий в выражение (17) для потенциальной
энергии деформации, в этом случае будет
равен
,
и коэффициент жесткости с,
входящий в выражение (17) для потенциальной
энергии деформации, в этом случае будет
равен
П ри
изгибе балки за координату х
принимается прогиб
f в некоторой
точке, а жесткость с
зависит от размеров пролета,
расположения внешней нагрузки
Рис
64.
ри
изгибе балки за координату х
принимается прогиб
f в некоторой
точке, а жесткость с
зависит от размеров пролета,
расположения внешней нагрузки
Рис
64.
и
условий закрепления балки. Так, для
балки на двух шарнирных опорах,
нагруженной посредине пролета
сосредоточенной силой Р,
жесткость следует вычислять по формуле
 ,
где
-
длина пролета, а
-
момент инерции поперечного сечения
балки. Для консольной балки будем иметь
,
где
-
длина пролета, а
-
момент инерции поперечного сечения
балки. Для консольной балки будем иметь
 .
Формула (3.93) теперь дает потенциальную
энергию деформации изгиба балки.
.
Формула (3.93) теперь дает потенциальную
энергию деформации изгиба балки.
При
кручении круглого цилиндра имеет место
аналогичный результат. Пусть к торцам
сплошного цилиндра из упругого материала
приложены крутящие моменты М;
размеры цилиндра: длина
и радиус R
считаются известными, ось z
направлена по оси цилиндра. Угол
закручивания на единицу длины цилиндра
определяется формулой
 ,
где Mz есть
упругий момент, создаваемый касательными
напряжениями в поперечном сечении
цилиндра; G
— модуль сдвига;
,
где Mz есть
упругий момент, создаваемый касательными
напряжениями в поперечном сечении
цилиндра; G
— модуль сдвига;
![]() -полярный
момент инерции сечения. Таким образом,
момент внутренних сил, действующих в
сечении цилиндра, пропорционален углу
поворота сечения
-полярный
момент инерции сечения. Таким образом,
момент внутренних сил, действующих в
сечении цилиндра, пропорционален углу
поворота сечения
 ;
элементарная работа этого момента на
угле поворота будет полным дифференциалом:
;
элементарная работа этого момента на
угле поворота будет полным дифференциалом:
![]()
Интегрируя
последнее соотношение, получаем
потенциальную энергию кручения
круглого стержня в виде
 ,
аналогичном (3.93), причем жесткость
стержня на кручение, как это следует из
проделанных вычислений, равна
,
аналогичном (3.93), причем жесткость
стержня на кручение, как это следует из
проделанных вычислений, равна
![]() .
.
В приведенных примерах поведение упругой системы описывалось одной координатой; возможны и более сложные (случаи, например, при одновременном растяжении, изгибе и кручении консольного стержня потенциальная энергия выражается соотношением
 .
.
3. Работа сил, приложенных к твёрдому телу.
Пусть
силы
![]() …….,
…….,![]() приложены к твердому телу в точках
приложены к твердому телу в точках
![]() …….,
…….,![]() .
Выбирая произвольную точку тела О
за полюс и обозначая вектор-радиус
.
Выбирая произвольную точку тела О
за полюс и обозначая вектор-радиус
![]() -й
точки тела
-й
точки тела
![]() ,
получим:
,
получим:
![]() ,
т. е. перемещение
,
т. е. перемещение
![]() точки
точки
![]() равно геометрической сумме перемещения
полюса
равно геометрической сумме перемещения
полюса
![]() и перемещения поворота
и перемещения поворота
![]() вокруг полюса (
вокруг полюса (![]() -
бесконечно малый вектор поворота). Тогда
элементарная работа силы
-
бесконечно малый вектор поворота). Тогда
элементарная работа силы
![]() запишется в форме:
запишется в форме:
![]() .
.
Второе слагаемое, согласно свойству скалярно-векторного произведения, может быть переписано в виде
![]() .
.
Элементарная работа всех сил будет

Обозначая
через
 -
главный вектор системы сил, через
-
главный вектор системы сил, через
 -
ее главный момент относительно полюса
О,
получим
-
ее главный момент относительно полюса
О,
получим
![]() (3.92а)
(3.92а)
В
частном случае поступательного движения
твердого тела
![]() ,
где
,
где
![]() -
элементарное перемещение, одинаковое
для всех точек тела. При вращении тела
вокруг неподвижной оси (пусть это будет
ось Oz), выбирая за полюс точку, лежащую
на оси вращения, получим
-
элементарное перемещение, одинаковое
для всех точек тела. При вращении тела
вокруг неподвижной оси (пусть это будет
ось Oz), выбирая за полюс точку, лежащую
на оси вращения, получим
![]() .
.
В случае плоского движения твердого тела имеем
![]()
где
через
![]() обозначен главный момент системы сил
относительно оси Oz,
перпендикулярной к плоскости движения
и проходящей через полюс О.
обозначен главный момент системы сил
относительно оси Oz,
перпендикулярной к плоскости движения
и проходящей через полюс О.
4 .
Работа внутренних сил, приложенных к
твердому телу, выражается через главный
вектор и главный момент этих сил. Работа
внутренних сил взаимодействия частиц
твердого тела равна нулю, так как главный
вектор и главный момент этих сил равны
нулю.
.
Работа внутренних сил, приложенных к
твердому телу, выражается через главный
вектор и главный момент этих сил. Работа
внутренних сил взаимодействия частиц
твердого тела равна нулю, так как главный
вектор и главный момент этих сил равны
нулю.
Рассмотрим задачу о качении цилиндра по шероховатой поверхности. Составим выра-
Рис 65. жение для элементарной работы
![]()
В
этой формуле
-
перемещение центра диска,
![]() -
поворот колеса (здесь по часовой стрелке).
Перепишем полученное выражение
-
поворот колеса (здесь по часовой стрелке).
Перепишем полученное выражение
![]() .
.
Если
диск катится без скольжения, т.е.
мгновенный центр скоростей находится
в нижней точке диска, то
![]() и работа силы трения скольжения равна
нулю и
и работа силы трения скольжения равна
нулю и
![]() .
Если диск катится с проскальзыванием,
то
.
Если диск катится с проскальзыванием,
то
![]() ,
так как в этом случае
,
так как в этом случае
![]() ,
где f -
коэффициент
трения скольжения диска о поверхность.
,
где f -
коэффициент
трения скольжения диска о поверхность.