

А7. Статические преобразования сум (42) – Суммирование
Алгоритм используется для суммирования (без масштабирования) нескольких (до 21) сигналов.
Выходной сигнал алгоритма равен Y = X0 + X1 + X2 +... + Xm.
Число дополнительных (к Х0) суммируемых сигналов 0 <= m <= 20 задается модификатором. При m=0 на входе имеется сигнал Х0, при m=1 - сигнал Х0 и Х1 и т.д.
Алгоритм не инициирует обратный счет, но если по инициативе других алгоритмов на каскадный выход Y приходит команда отключения со значением начальных условий Y0, алгоритм выполняет процедуру обратного счета, формируя на каскадном входе Х0 сигнал Х0 = Y0 - (Х1 + Х2 +... + Хm).
Этот сигнал вместе с командой отключения транслируется предвключенному алгоритму.

Рисунок 30
Сма (43) Суммирование с масштабированием
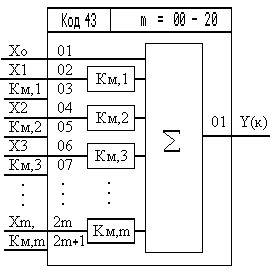
Рисунок 31
Км,i – коэффициент масштабирования i- го слагаемого. Алгоритм используется для получения взвешенной суммы нескольких (до 21) сигналов. В частности, он применяется вместе с алгоритмами регулирования для построения регуляторов соотношения либо для введения статической коррекции.
Число масштабируемых и суммируемых сигналов 0 <= m <= 20 и задается модификатором (немасштабируемый сигнал Х0 имеется всегда, независимо от значения модификатора).
Выходной сигнал алгоритма Y равен Х0+Км1*Х1+…+Км,m*Хm.
Алгоритм не инициирует обратный счет, но если по инициативе других алгоритмов на каскадный выход Y поступает команда отключения со значением начальных условий Y0, алгоритм выполняет процедуру обратного счета, формируя на каскадном входе Х0 сигнал рис. 10.39б
Этот сигнал вместе с командой отключения через вход Х0 транслируется предвключенному алгоритму.
Алгоритм не реагирует на команду запрета, но эта команда через вход Х0 транслируется предвключенному алгоритму.
УМД (44) Умножение-деление

Рисунок 32
КОР (45) Корень квадратный

Рисунок 33
МОД (46) Модуль

Рисунок 34
КУС (47) Кусочно-линейная функция

Рисунок 35
Алгоритм применяется для линеаризации нелинейной зависимости (например, датчика или регулирующего органа), а также для искусственного введения нелинейности (например, зоны нечувствительности, релейной характеристики и т.п.).
Выходной сигнал Y связан со значением сигнала на входе Х зависимостью, показанной на рис.36 и рис.37. Число отрезков определяется модификатором m и может задаваться в пределах 0<=m<=49. Координата конца отрезка определяется парой сигналов Хi, Yi(абсцисса и ордината конца отрезка), которые задаются соответствующими значениями сигналов на настроечных входах алгоритма.
При Х < Х1 и Х > Хm выходной сигнал Y=const. На выходе Nуч формируется число, равное номеру текущего участка кусочно-линейной зависимости (рис. 35).
Координаты Xi, Yi могут находиться в любом из четырех квадрантов. Как правило, координата Хi >= Хi-1 (i - номер отрезка). Если задано Хi < Хi-1, то формируется функция, показанная на рис.37. Можно задавать Хi=Х . В этом случае формируется функция, показанная на рис.38, причем при Хi=Х=Х выход Y=Yi. Алгоритм работает правильно, если Yi+1 - Yi <= 200%. При m=0 выходной сигнал Y=0 независимо от Х.

Рисунок 36

Рисунок 37

Рисунок 38