

А5. Алгоритмы регулирования ран (20) ‑ Регулирование аналоговое
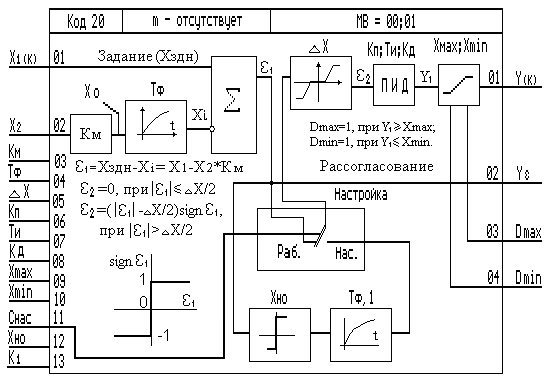
Рисунок 11
Х1 –задание. Х2 – значение регулируемой величины. Км – коэффициент масштабирования. Тф- постоянная экспоненциального фильтра. Х – зона нечувствительности. Кп –коэффициент пропорциональности. Ти – время интегрирования. Кд – коэффициент дифференцирования. Xmin, Xmax – ограничения сигнала регулирования по минимуму и максимуму. Y – выход регулятора. Y - величина рассогласования (1). Dmax , Dmin – признак выхода сигнала регулирования или за верхнюю границу (Xmax) или за нижнюю границу (Xmin). Алгоритм будет правильно работать, только если Хmax > Хmin.
Алгоритм используется при построении ПИД-регулятора, имеющего аналоговый выход.
Функциональная схема алгоритма содержит несколько звеньев. Звено, выделяющее сигнал рассогласования, суммирует два входных сигнала, при этом один из сигналов масштабируется, фильтруется и инвертируется. Сигнал рассогласования (без учета фильтра) равен 1 = X1 - Kм * X2.
Зона нечувствительности не пропускает на выход сигналы, значения которых находятся внутри установленного значения зоны.
ПИД-звено выполняет пропорционально-интегрально-дифференциально преобразование сигнала. Коэффициент дифференцирования, равный Кд = Тд/Ти. При Кд*Ти > 819 значение Тд равнобесконечности.
Алгоритм РАН может использоваться в качестве ПД- или П-регулятора. В ПД-регуляторе устанавливается Тн = бесконечности. Если этот параметр установлен оператором вручную в режиме программирования, то интегральная ячейка аннулируется. При этом, если Кд <= 1, постоянная времени дифференцирования Т = 819 Кд; если Кд > 1, то Тд равно бесконечности.
Для получения П-регулятора следует установить значение Ти равным бесконечности и Кд = 0. Свойства интегральной ячейки при этом остаются такими же, как в ПД-регуляторе.
Алгоритм относится к группе следящих. Команда отключения вместе с значением начальных условий Y поступает на каскадный выход Y алгоритма. В режиме отключения работа алгоритма изменяется следующим способом:
1) интегральная ячейка ПИД-звена "заряжается" до значения Yи = Y0 - Kп * 2,
где 2 - рассогласование, фиксируемое после зоны нечувствительности;
2) Д-составляющая обнуляется;
3) при выполнении необходимых условий входной сумматор переходит в режим обратного счета, при этом на каскадном входе Х1 формируется команда отключения и устанавливается значение начальных условий Х0 = Км*Х2. Эти сигналы передаются предвключенному алгоритму.
В режим запрета алгоритм переходит в двух случаях:
1) по собственной инициативе, когда выходной сигнал ПИД-звена
вышел за установленные пороги ограничения;
2) если команда запрета поступает извне на каскадный выход Y.
В любом случае в режиме запрета выполняются следующие операции:
1) блокируется изменение И-составляющей ПИД-звена в запрещенном направлении;
2) при выполнении необходимых условий на каскадном входе Х1 формируется команда запрета, которая передается предвключенному алгоритму.
В остальном работа в режиме запрета не изменяется.
При работе в отключенном режиме сигнал Y0, "навязанный" алгоритму извне, может выйти за пороги ограничения. Ограничитель не препятствует этому, но после перехода в стандартный режим изменение выходного сигнала возможно лишь в направлении, приближающем выходной сигнал к установленным порогам ограничения. Если выходной сигнал изменяется именно в этом направлении, команда запрета не формируется, в противном случае формируется команда запрета, которая через вход Х1 транслируется предвключенному алгоритму.
После того как выходной сигнал выйдет из области ограничения и вернется на линейный участок, выходной сигнал вновь может изменяться в обоих направлениях.
В режиме работы признак настройки должен быть равен нулю (Снас = 0).