

Задача 2
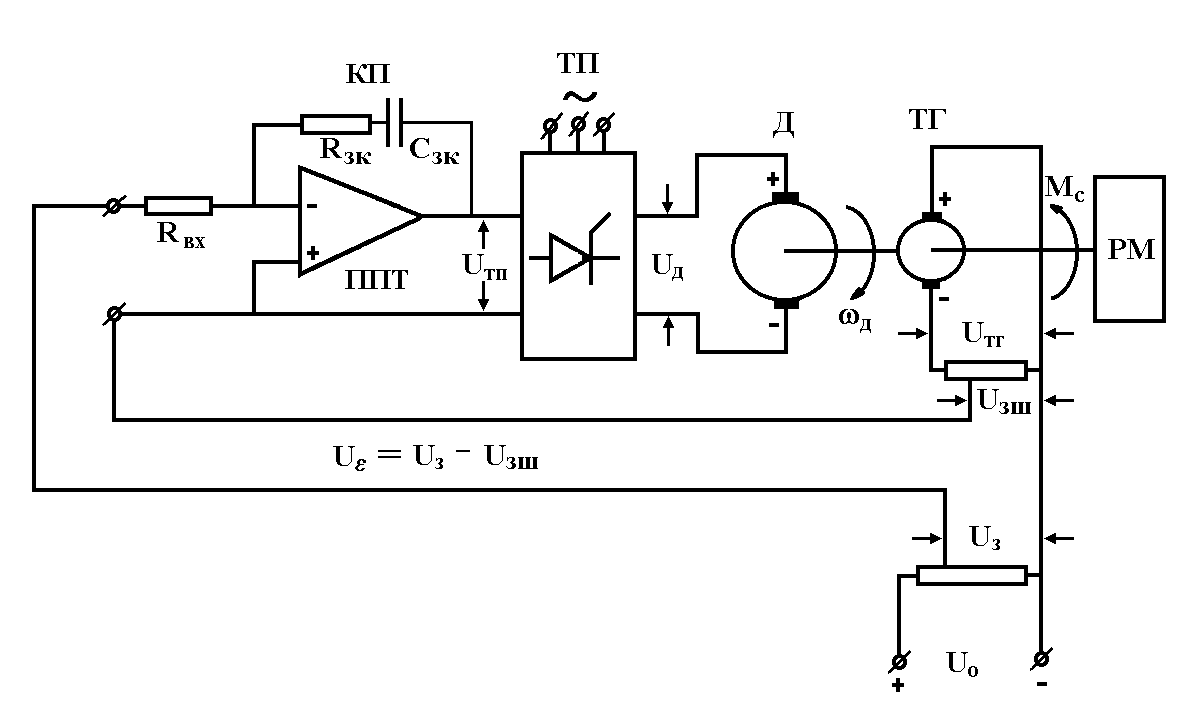
На рисунку 6.2 показана функціональна схема системи автоматичної стабілізації кутової швидкості обертання двигуна постійного току (регулятора швидкості), а на рис 6.3 – функціональна схема електромеханічної слідкуючої системи постійного току.
Чисельні значення параметрів елементів, що утворюють регулятор швидкості і слідкуючи систему, приведені у таблицях 6.2 і 6.3.
Варіант контрольної роботи задається викладачем на настановній сесії або вибирається у такий спосіб. Вся група розбивається старостою на дві підгрупи: перша розраховує характеристики регулятора швидкості (див. рис. 6.2) і вибирає номер варіанта з табл. 6.2, а друга розраховує характеристики слідкуючої системи і вибирає номер варіанта з табл.6.3. Чисельні значення параметрів, що приведені у табл. 6.2 і табл.6.3, використовуються при виконанні як першої, так і другої задачі.
Для вибраної системи потрібно виконати наступне.
З’ясувати призначення і основні властивості окремих елементів, що складають систему, а також принцип управління, у відповідності з яким працює замкнена система (принцип управління по відхиленню керованої величини).
Скласти диференційні рівняння окремих елементів, що складають систему.
По диференціальним рівнянням окремих елементів скласти диференціальні рівняння розімкнутої, замкнутої системи і помилки
По отриманим диференціальним рівнянням визначити передатні функції окремих елементів, розімкнутої системи, замкнутої системи і помилки.
Намалювати алгоритмічну схему системи.
Визначити граничний коефіцієнт підсилення.
Вибрати коефіцієнт підсилення корегуючого пристрою
 для системи стабілізації швидкості та
електронного підсилювача
для системи стабілізації швидкості та
електронного підсилювача
 для слідкуючої системи таким, щоб запас
стійкості системи по посиленню знаходився
в діапазоні
для слідкуючої системи таким, щоб запас
стійкості системи по посиленню знаходився
в діапазоні
 .
.Для обраного коефіцієнта підсилення записати рівняння стану замкнутої системи і намалювати алгоритмічну схему.
Визначити і побудувати:
перехідну функцію замкнутої системи;
амплітудно-фазову характеристику замкнутої системи; логарифмічні частотні характеристики розімкнутої системи.
Рисунок
6.2
– Принципова схема системи стабілізації
кутової швидкості
Рисунок
6.3
– Принципова схема слідкуючої системи
Примітка. На схемах прийняті такі позначення.
Рисунок 6.2.
![]() – напруга
завдання швидкості (вхідний сигнал
замкненої системи);
– напруга
завдання швидкості (вхідний сигнал
замкненої системи);
![]() – напруга,
що прикладається до ланцюга обмотки
якоря двигуна;
– напруга,
що прикладається до ланцюга обмотки
якоря двигуна;
![]() – напруга
на виході тиристорного перетворювача
(ТП);
– напруга
на виході тиристорного перетворювача
(ТП);
![]() – напруга
на виході вимірювального пристрою
замкненої системи (сигнал неузгодженості);
– напруга
на виході вимірювального пристрою
замкненої системи (сигнал неузгодженості);
![]() – напруга
на виході тахогенератора (ТГ);
– напруга
на виході тахогенератора (ТГ);
![]() – напруга
на виході потенціометра у ланцюгу
зворотного зв’язку по швидкості (сигнал
зворотного зв’язку по швидкості);
– напруга
на виході потенціометра у ланцюгу
зворотного зв’язку по швидкості (сигнал
зворотного зв’язку по швидкості);
![]() – кутова
швидкість обертання двигуна (
– кутова
швидкість обертання двигуна (![]() )
постійного току з незалежним збудженням
(вихідний сигнал системи управління;
)
постійного току з незалежним збудженням
(вихідний сигнал системи управління;
![]() – момент
статичного опору на валу двигуна;
– момент
статичного опору на валу двигуна;
– послідовний корегуючий пристрій, що виконаний на підсилювачі постійного току (ППТ);
![]() – робочий
механізм.
– робочий
механізм.
Рисунок 6.3.
![]() – вхідний
і вихідний сигнали відповідно;
– вхідний
і вихідний сигнали відповідно;
– напруга
на виході вимірюючого пристрою, що
складається з потенціометрів
![]() і
і
![]() ;
;
– електронний підсилювач;
– напруга
на вході тиристорного перетворювача
![]() ;
;
– напруга на вході двигуна постійного струму незалежного збудження ;
![]() – камандна
і виконуюча осі відповідно;
– камандна
і виконуюча осі відповідно;
![]() – редуктор;
– редуктор;
– робочий механізм.
Таблиця 6.2 – Вихідні дані до задачі 2 (система стабілізації швидкості)
Варіант |
Параметри |
||||||
Остання цифра шифру |
Передостання цифра шифру |
||||||
|
|
|
|
|
|
|
|
0 |
0,1 |
0,025 |
2,0 |
0,022 |
6 |
2 |
0,05 |
1 |
0,12 |
0,03 |
2,1 |
0,015 |
6 |
2,2 |
0,04 |
2 |
0,16 |
0,04 |
2,2 |
0,016 |
8 |
2,5 |
0,03 |
3 |
0,18 |
0,02 |
2,3 |
0,012 |
10 |
1,8 |
0,06 |
4 |
0,20 |
0,05 |
2,4 |
0,01 |
10 |
1,7 |
0,07 |
5 |
0,25 |
0,06 |
2,5 |
0,009 |
12 |
2,5 |
0,03 |
6 |
0,17 |
0,08 |
2,8 |
0,008 |
14 |
1,6 |
0,08 |
7 |
0,21 |
0,035 |
3,0 |
0,007 |
14 |
2,2 |
0,04 |
8 |
0,11 |
0,04 |
3,2 |
0,008 |
16 |
2,0 |
0,05 |
9 |
0,14 |
0,07 |
3,6 |
0,005 |
20 |
1,8 |
0,06 |
Таблиця 6.2 – Вихідні дані до задачі 2 (слідкуюча система)
Варіант |
Параметри |
||||||
Остання цифра шифру |
Передостання цифра шифру |
||||||
, |
, |
|
, |
|
|
|
|
0 |
0,45 |
2,0 |
0,001 |
0,022 |
6 |
4 |
0,05 |
1 |
0,40 |
2,1 |
0,001 |
0,015 |
6 |
6 |
0,07 |
2 |
0,35 |
2,2 |
0,001 |
0,016 |
8 |
8 |
0,09 |
3 |
0,33 |
2,3 |
0,002 |
0,012 |
10 |
10 |
0,11 |
4 |
0,28 |
2,4 |
0,002 |
0,01 |
10 |
12 |
0,13 |
5 |
0,25 |
2,5 |
0,005 |
0,009 |
12 |
14 |
0,15 |
6 |
0,2 |
2,8 |
0,005 |
0,008 |
14 |
16 |
0,17 |
7 |
0,17 |
3,0 |
0,01 |
0,007 |
14 |
18 |
0,18 |
8 |
0,15 |
3,2 |
0,01 |
0,008 |
16 |
20 |
0,19 |
9 |
0,12 |
3,6 |
0,2 |
0,005 |
20 |
20 |
0,20 |
Примітка. У таблицях прийняті наступні позначення.
Таблиця 6.2.
, , – електромагнітна, електромеханічна постійні часу і коефіцієнт підсилення двигуна постійного струму;
і – постійна часу і коефіцієнт підсилення підсилювача потужності (тиристорного перетворювача);
, – коефіцієнти підсилення тахогенератора та потенціометра у ланцюзі зворотного зв’язку по швидкості;
Таблиця 6.3.
, – електромеханічна постійна часу і коефіцієнт підсилення двигуна постійного струму;
– коефіцієнт підсилення редуктора.
і – постійна часу і коефіцієнт підсилення підсилювача потужності (тиристорного перетворювача);
– коефіцієнт підсилення вимірювального пристрою;
 – коефіцієнт
підсилення коригувального пристрою,
що диференціює.
– коефіцієнт
підсилення коригувального пристрою,
що диференціює.