

III. Угол между прямой и плоскостью
Дано: , П : Ах + Ву + Сz + D = 0, t : . Найти один из углов между П и t. Решение. Угол между прямой и плоскостью – это угол между прямой и её ортогональной проекцией на плоскость |
Рис. 35 |
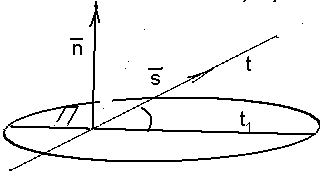
(рис. 35). Из уравнений прямой и плоскости
вектор
перпендикулярен плоскости П, а
вектор
![]() параллелен прямой t
. Следовательно,
параллелен прямой t
. Следовательно,
![]() ).
Отсюда следует, что
).
Отсюда следует, что
sin(П,![]() =
=
![]() (50)
(50)
Из свойств векторов и следует:
П t
![]() ;
П t
;
П t
![]() (51)
(51)
IV. Расстояние от точки до плоскости
V. Расстояние от точки до прямой
VI. Расстояние между скрещивающимися прямыми
2.7.3. Геометрический смысл неравенства Ах + Ву + Сz + D 0 ( 0, 0, 0)
3. Различные системы координат на плоскости и в пространстве
3.1. Полярная система координат на плоскости
3.2. Цилиндрическая и сферическая системы координат в пространстве
4. ОБРАЗЫ ВТОРОГО ПОРЯДКА
4.1. Элементарная теория линий второго порядка
4.1.1. ОКРУЖНОСТЬ
Определение 1. Окружностью с центром С и радиусом а называется множество точек плоскости, удалённых от точки С на расстояние а. Обозначение = окр(С, а).
Если на плоскости зафиксирована ПДСК
и С(х0,у0), то М
СМ
= а. Если М(х, у), то М
![]() (х – х0)2
+ (у – у0)2 = а2.
Следовательно, уравнение окружности
в ПДСК есть (х – х0)2 + (у –
у0)2 = а2.
(х – х0)2
+ (у – у0)2 = а2.
Следовательно, уравнение окружности
в ПДСК есть (х – х0)2 + (у –
у0)2 = а2.
Если А(х1, у1)
, то уравнение
касательной к в
точке А можно получить как уравнение
прямой, проходящей через точку А
перпендикулярно вектору
![]() =х1–х0,у1–у0.
Получим уравнение (х1 – х0)(х
– х0) + (у1 – у0)(у
– у0) = а2.
=х1–х0,у1–у0.
Получим уравнение (х1 – х0)(х
– х0) + (у1 – у0)(у
– у0) = а2.
4.1.2. Эллипс
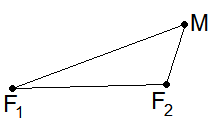
Определение 2. Эллипсом называется множество всех точек плоскости, сумма расстояний от каждой из которых до двух данных различных точек есть постоянная величина (рис. 1).
Данные точки называются фокусами и обозначаются F1 и F2.
Данная постоянная
величина обозначается 2 то при с не существует ни одной точки М. При = с точки М заполняют отрезок F1F2. Поэтому для того, чтобы эллипс был отличен от отрезка необходимо и достаточно, чтобы с. |
Рис. 1 |
Поставим задачи:
Выбрав какую-либо систему координат, вывести уравнение эллипса.
Используя полученное уравнение, исследовать форму и свойства эллипса.
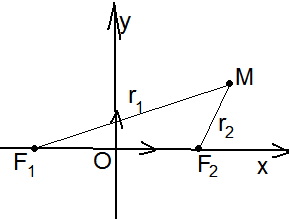
Так как в определении эллипса используется расстояние между точками, то систему координат лучше выбрать прямоугольную. Так как все точки эллипса связаны с фокусами, то за начало координат лучше выбрать середину отрезка F1F2. Ось (ОХ) направим через фокусы в направлении от F1 к F2 (рис. 2). Выбранная система координат называется
канонической системой координат для эллипса. В этой системе координат F1(-с, 0), F2 (с, 0). Пусть М (х, у). Тогда
r1
= F1М
=
М эллипсу r1 + r2 = 2а. Следовательно, М эллипсу + = 2а (1) Уравнение (1) есть уравнение эллипса. Упростим его. Для этого |
Рис. 2 |
уединим один из корней и возведём в квадрат.
= 2а ,
х2 – 2сх + с2 + у2 = 4а2 – 4а + х2 + 2сх + с2 + у2
а = а2 + сх.
Ещё раз возведя в квадрат, получим
а2х2 + 2 а2сх + а2с2 + а2у2 = а4 + 2 а2сх + с2х2,
(а2 – с2)х2 + а2у2 = а2(а2 – с2).
Так как с, то можно обозначить а2 – с2 = в2. Последнее уравнение запишется
в2х2 + а2у2 = а2в2. Разделив на = а2в2, получим
![]() (2)
(2)
Итак, уравнение (1) преобразовано в уравнение (2). Но при этом два раза применяли возведение в квадрат. Следовательно, нужно проверить, что уравнения (1) и (2) эквивалентны. Для этого достаточно показать, что, если координаты (х, у) удовлетворяют уравнению (2), то они удовлетворяют и уравнению (1).
Пусть (х, у) удовлетворяют уравнению
(2). Тогда
![]() =
=
![]() .
Подставив у2 в выражение для r1,
получим r1 =
.
Подставив у2 в выражение для r1,
получим r1 =
![]() =
=
![]() = =
= =
![]() =
=
![]() =
=
![]() =
=
![]() (Из уравнения (2) следует, что
а
х а . Так как
с, то
0). Аналогично
получим, что r2
=
(Из уравнения (2) следует, что
а
х а . Так как
с, то
0). Аналогично
получим, что r2
=
![]() .
Следовательно, r1
+ r2
= 2
,
но это значит, что
точка М(х, у) лежит на эллипсе. Итак,
уравнения (1) и (2) эквивалентны. Уравнение
(2) называется каноническим
уравнением эллипса.
.
Следовательно, r1
+ r2
= 2
,
но это значит, что
точка М(х, у) лежит на эллипсе. Итак,
уравнения (1) и (2) эквивалентны. Уравнение
(2) называется каноническим
уравнением эллипса.
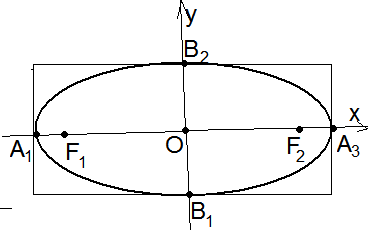
Будем исследовать эллипс, используя уравнение (2). Из него следует:
|
Рис. 3 |
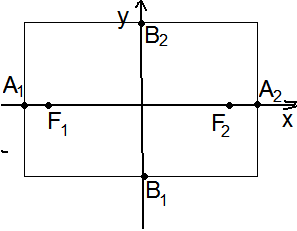
В2(0, );
эллипс вписан в прямоугольник, стороны которого параллельны осям координат и проходят через точки А1, А2, В1, В2 (рис. 3);
эллипса лежат на его большой оси между вершинами. |
Рис.4 |
Величина =
![]() называется эксцентриситетом эллипса.
Очевидно, 0
1.
называется эксцентриситетом эллипса.
Очевидно, 0
1.
Определение 3. Прямые, которые в
канонической системе координат имеют
уравнения
![]() называются директрисами эллипса.
называются директрисами эллипса.
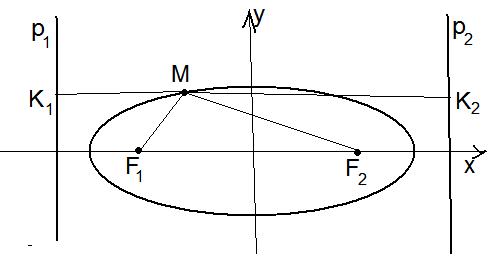
Так как 1, то эллипс лежит между своими директрисами (рис. 5).
Фокус F1(-с, 0)
и директриса
![]() ,
а так же фокус F2(с,
0) и директриса
,
а так же фокус F2(с,
0) и директриса
![]() называются соответствующими.
называются соответствующими.
Теорема 1. Отношение расстояния от любой точки эллипса до фокуса к расстоянию от этой же точки до соответствующей директрисы есть постоянная величина, равная эксцентриситету.
Доказательство. F1М
=
= а + х, МК1=
=
Аналогично, F2М : МК2 = . (Здесь МК1 и МК2 перпендикуляры, опущенные из точки М на директрисы р1 и р2 соответственно.) |
Рис. 5 |
Определение 4. Прямая называется касательной к эллипсу, если она имеет с эллипсом одну двукратную точку пересечения. Общая точка эллипса и его касательной называется точкой касания.
Теорема 2. В любой точке эллипса существует касательная к нему и только одна. Если эллипс задан уравнением (2) и точка касания М0(х0, у0), то касательная имеет уравнение
![]() (3).
(3).
Доказательство. Если М0(х0,
у0) – любая точка эллипса, то
![]() =
1 (). Пусть р
– любая прямая, проходящая через точку
М0. Тогда уравнения р будут х = х0
+ mt, у = у0
+ nt, где {m, n} – координаты
направляющего вектора прямой р. Для
того чтобы найти уравнение касательной,
достаточно найти m и n. Координаты точки
пересечения эллипса и прямой р должны
удовлетворять системе
,
х = х0 + mt, у
= у0 + nt.
=
1 (). Пусть р
– любая прямая, проходящая через точку
М0. Тогда уравнения р будут х = х0
+ mt, у = у0
+ nt, где {m, n} – координаты
направляющего вектора прямой р. Для
того чтобы найти уравнение касательной,
достаточно найти m и n. Координаты точки
пересечения эллипса и прямой р должны
удовлетворять системе
,
х = х0 + mt, у
= у0 + nt.
Подставляя х и у в первое уравнение
системы, получаем
![]() .
Отсюда
.
Отсюда
 .
Используя (), получим
.
Используя (), получим
![]() .
Так как t = 0 является
решением полученного уравнения, то для
существования уравнения касательной
необходимо и достаточно, чтобы второй
его корень тоже был равен нулю, т.е.
должно быть
.
Так как t = 0 является
решением полученного уравнения, то для
существования уравнения касательной
необходимо и достаточно, чтобы второй
его корень тоже был равен нулю, т.е.
должно быть
![]() .
Все решения этого уравнения пропорциональны
решению
.
Все решения этого уравнения пропорциональны
решению
![]() .
Так как все эти решения определяют
пропорциональные векторы, то искомая
касательная существует и только одна.
Найдём её уравнение, используя каноническое
уравнение прямой, проходящей через
данную точку параллельно данному
вектору. Получим
.
Так как все эти решения определяют
пропорциональные векторы, то искомая
касательная существует и только одна.
Найдём её уравнение, используя каноническое
уравнение прямой, проходящей через
данную точку параллельно данному
вектору. Получим
 .
Преобразуя это уравнение и используя
(), получим уравнение
.
.
Преобразуя это уравнение и используя
(), получим уравнение
.
Теорема 3. Если большая ось эллипса постоянна, то при 0 эллипс стремится к окружности, если 1, то эллипс стремится к своей большой оси (т.е. к отрезку А1А2).
Доказательство. Так как
![]() и
и
![]() ,
то при постоянном а с уменьшением
уменьшается с, а
увеличивается. Если
0, то
а, т.е. эллипс стремится к окружности.
При этом фокусы сближаются и стремятся
к центру окружности. Следовательно,
окружность есть предельное положение
эллипса. Если
1, то с а,
0, Фокусы стремятся к вершинам большой
оси, а сам эллипс стремится к отрезку
А1А2.
,
то при постоянном а с уменьшением
уменьшается с, а
увеличивается. Если
0, то
а, т.е. эллипс стремится к окружности.
При этом фокусы сближаются и стремятся
к центру окружности. Следовательно,
окружность есть предельное положение
эллипса. Если
1, то с а,
0, Фокусы стремятся к вершинам большой
оси, а сам эллипс стремится к отрезку
А1А2.
Замечание 1. Если при выводе уравнения эллипса через фокусы направить ось (ОУ) и постоянную, о которой идёт речь в определении, обозначить 2 , то будет с, а2 = 2 – с2 и уравнение эллипса будет такого же вида , но а.
Замечание 2. Если центром эллипса
является точка М(х0, у0), но
оси его параллельны координатным осям,
то уравнение эллипса будет
![]() .
.