

Відповідь на питання по дисципліні «Технологічне устаткування псм (2 частина)»
ПИТАННЯ:
Склад основного технологічного обладнання для виробництва керамічної цегли напівсухим способом формування.
ВІДПОВІДЬ:
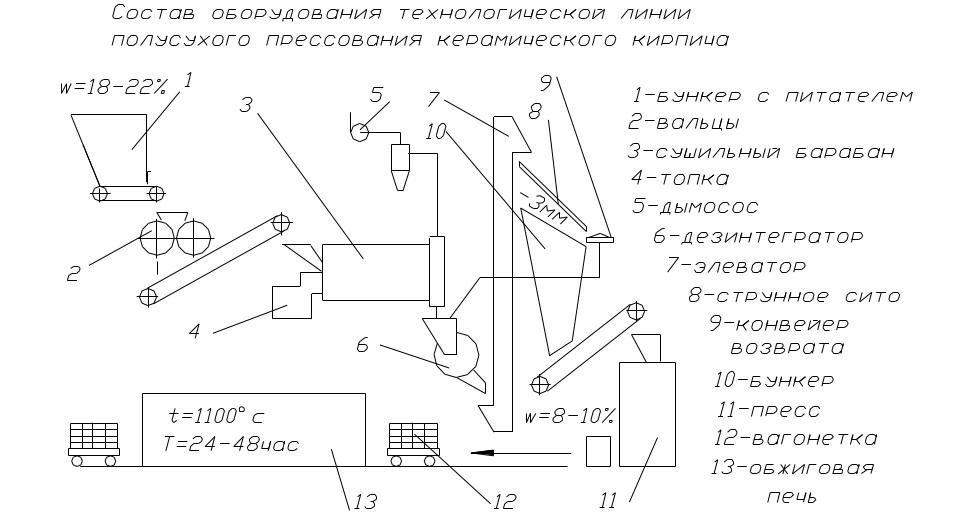
Варіанти використання основного обладнання:
вальці (поз.2) – для виділення каменів, або грубого помелу;
замість дезінтеграторів можливе використання стрижневого підготовлювача;
типи використовуваних пресів: СМК-503, СМК-491, СМ-1085.
Відповідь на питання по дисципліні «Підйомно-транспортні машини»
ПИТАННЯ:
Вибір гальма механізму пересування за умови відсутності «юза» при гальмуванні. Розрахунок гальмівного шляху.
ВІДПОВІДЬ:
Гальма в механізмі пересування встановлюються при необхідності обмеження шляху зупинки візка або крана, що залежить, насамперед, від швидкості пересування, а також від коефіцієнта опору пересуванню й ухилу шляху.
Як приклад, на рисунку наведена кінематична схема механізму пересування візка з рельсоколісным приводом. Гальма на схемі встановлені на швидкохідному валу двигуна, де крутний момент менший, ніж на тихохідному валу. При цьому габарити, маса і вартість гальма будуть найменшими.
В механізмах пересування застосовують найбільш розповсюджені нормально замкнені колодкові гальма з пружинним замиканням і розмиканням за допомогою електромагніта (ТКТ) або гідроштовхальника (ТКГ, ТКТГ).
Основним робочим параметром гальм є гальмівний момент Мт, Н·м, за яким гальма вибираються по каталогу з ряду, що випускаються. У каталозі вказується максимальний гальмівний момент гальма Мт тах , на який він розрахований. Гальма можуть бути відрегульованими на менший гальмівний момент зменшенням затягування робочої пружини. Після регулювання гальмівний момент однаковий як при гальмуванні навантаженого візка вагою
GΣ = (Q · g + Gт), кН
де (Q – вантажопідйомність, т; g – прискорення вільного падіння, м/с2; Gт – вага візка, кН ),
так і порожнього візка вагою
GΣ = Gт .
Гальма для механізму пересування вибирають за умови відсутності просклизання («юза») коліс по рейках при гальмуванні. Просклизання («юз») характеризується тим, що лінійна швидкість поверхні кочення колеса менше швидкості візка (у межі – зв'язані з гальмом колеса вже зупинені, а візок ще рухається). «Юз» приводить до швидкого зносу коліс (особливо реборд), тому неприпустимий. Він виявляється за умови, якщо гальмовий момент гальма перевищить крутний момент.«Юз» виявляється при гальмуванні порожнього візка, оскільки гальмівний момент у цьому випадку такий же, як і при гальмуванні навантаженого візка, а сила зчеплення коліс з рейками значно менше.
Умова відсутності «юза»:
Мт ≤ Мсц.тin ,
де Мсц.тin – приведений до вала двигуна момент сили зчеплення зв'язаних з гальмами коліс і рейок:
Мсц.тin
≈
![]() , Н·м
, Н·м
де R, Им – радіус коліс, м, граничне число механізму пересування,
Нм = ωдв /ωдо – співвідношення кутових швидкостей двигуна і колеса.
Максимальної сила зчеплення Fсц.тin буде у порожнього візка:
Fсц.тin
=![]() ,
,
де Рсц.тin
=
![]() - частина ваги візка, що приходиться на
зв'язані з гальмом колеса; n, nт.к.
– відповідно кількість усіх коліс і
коліс, зв'язаних з гальмом.
- частина ваги візка, що приходиться на
зв'язані з гальмом колеса; n, nт.к.
– відповідно кількість усіх коліс і
коліс, зв'язаних з гальмом.
Коефіцієнт зчеплення φ для механізмів, що працюють у закритих приміщеннях, приймаємо φ = 0,2 . Коефіцієнт запасу зчеплення Кз.с. = 1,15-1,2.
Можна вибрати гальмо, у якого Мт.ф. = Мт тах ≤ Мсц.тin . Можна вибрати гальмо, у якого Мт тах перевищує Мсц.тin , але вказати на обов'язковість регулювання гальмівного моменту до рівня Мт.ф. ≤ Мсц.тin .
Гальмівний шлях lт буде найбільшим при зупинці навантаженого візка, оскільки гальмівний момент постійний, а момент від сил інерції більше. Тому визначають гальмівний шлях навантаженого візка lт.гр. :
lт.гр. = Vср.т · tт.гр. ;
Vср.т = Vф. ;
tт.гр
=
 ;
;
ІΣ = Ів.и. + Іпост ;
Ів.ч. = (Ір + Іш) · З
Іпост
≈
 ;
;
Мдин = Мт.ф. + Мст.т.гр. ;
Мст.т.гр.
=
![]() ;
;
![]() .
.
де: Vср.т і Vф – середня в процесі гальмування і фактична швидкості пересування, м/с;
tт.гр – тривалість гальмування навантаженого візка, з;
IΣ , Iпост , Iв.ч. , Iр , Iш – моменти інерції відповідно всіх частин, що рухаються, поступально і обертов, а також ротора двигуна і шківа гальма, кг·м2;
З, Кр – коефіцієнти, що враховують інерційність інших валів, крім швидкохідного, а також тертя реборд коліс об головку рейки;
fΣ - сумарний коефіцієнт опору рухові візка по рейках;
mпор – маса порожнього візка, кг;
R – радіус колеса, м;
Мдин., Мст.т.гр. – приведені до вала двигуна динамічний момент, за рахунок якого зупиняється візок і статичний момент від сил опору, Н·м;
Wт.гр , Wу , Wв – сили опору пересуванню навантаженого візка – сумарна і складові, зв'язані з ухилом шляху і витком, Н.
При необхідності, скорочення гальмівного шляху може бути досягнуто або зниженням швидкості пересування візка, або збільшенням сили зчеплення і гальмівного моменту (нарощування якості зв'язаних з гальмом коліс або ваги візка).
Додаток 2