

4.2.2. Аналоги прискорень
Відомо, що прискорення - це друга похідна за часом від радіуса-вектора.
|
(4.10) |
|
(4.11) |
За аналогією:
|
(4.12) |
|
(4.13) |
Аналог прискорення – це друга похідна від радіуса-вектор за узагальненою координатою.
Встановимо зв'язок між прискоренням та аналогом прискорення:
Отже,
|
(4.14) |
Аналогічно:
|
(4.15) |
Властивості планів швидкостей та прискорень.
Абсолютні швидкості проходять через полюс плану і спрямовані від полюса.
Відносні швидкості через полюс плану не проходять.
Кінці векторів абсолютних швидкостей точок ланки утворюють фігуру, подібну до фігури ланки, і повернуті відносно неї на кут p/2.
Полюс плану є зображуючою точкою миттєвого центра швидкостей ланки.
План швидкостей будується на основі розв'язання векторного рівняння:
|
(4.16) |
Абсолютні прискорення проходять через полюс плану та спрямовані від полюса.
Відносні прискорення через полюс плану не проходять.
Кінці векторів абсолютних прискорень точок ланки утворюють фігуру, подібну до фігури ланки, і повернуті відносно неї на кут
 ,
де
,
де
 у бік кутового прискорення
у бік кутового прискорення
 .
.Полюс плану прискорень є зображуючою точкою миттєвого центра прискорень.
Кінематичне дослідження механізмів методом планів швидкостей та прискорень.
Тут дохера писать…кому-то не повезет
Визначення кутових швидкостей та прискорень ланок механізму за його планами
швидкостей та прискорень. Контрольна №5
Задачі кінетостатичного дослідження механізмів. Принцип кінетостатики.
Задачею КАМ є визначення реакцій (тисків) у кінематичних парах механізму з урахуванням сил інерції, а також зрівноважувальної сили або зрівноважувального моменту, які прикладені до початкової ланки.
Принцип кінетостатики полягає в тому, що в число зовнішніх сил, що діють на ланки механізму, запроваджують сили інерції, які є фіктивними для самої ланки, але реальними для її зв'язків.
Принцип кінетостатики ґрунтується на відомому положенні Д'Аламбера, згідно з яким система сил, до якої уведені сили інерції, вважається рівноважною, і для неї придатні рівняння статики.
Отже, при включенні в число сил, що діють на ланку, сили інерції, ланка умовно вважається у стані спокою, тому можна застосовувати рівняння статики.
Цей принцип є методологічним.
Сили, що діють на ланки механізму.
Розглянемо блок-схему, наведену на рис. 5.1.
|
Рис. 5.1. Сили, що діють на ланки механізму |
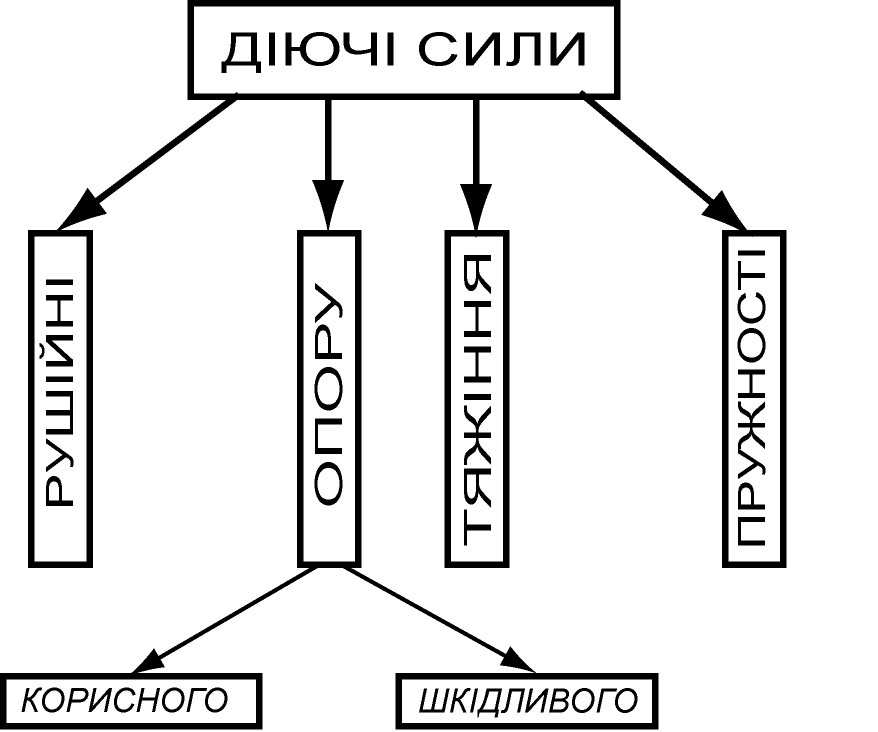
5.2.1. Рушійні сили – це сили, робота яких за цикл усталеного руху додатна.
|
(5.1) |
Рушійні сили задаються у вигляді діаграм, наприклад (рис.5.2):
5.2.2. Сили опору – це сили, робота яких за цикл усталеного руху від'ємна.
5.2.2.1. Сили корисного опору – це сили, для подолання яких призначено механізм.
Сили корисного опору задаються у вигляді діаграм
5.2.2.2. Сили шкідливого опору – це сили, для подолання яких необхідно витратити роботу понад тої роботи, що йде на виконання технологічного процесу. Наприклад, сили тертя в кінематичних парах механізму.
5.2.3. Сили тяжіння
|
(5.2) |
де
![]() - маса, кг;
- маса, кг;
![]() - прискорення вільного падіння, м/с2.
- прискорення вільного падіння, м/с2.
Робота сил тяжіння за цикл усталеного руху дорівнює нулю.
5.2.4. Сили пружності
|
(5.3) |
де
![]() - коефіцієнт жорсткості, Н/м;
- коефіцієнт жорсткості, Н/м;
![]() - переміщення, м.
- переміщення, м.
Робота сил пружності за цикл усталеного руху дорівнює нулю.