

60 Задачі синтезу зубчастих зачеплень. Види зачеплень.
Зубчасте зачеплення – це вища кінематична пара, яка утворена послідовно взаємодіючими елементами двох ланок.
Зубчаста передача - це триланковий механізм, який складено з двох зубчастих коліс і стояка.
Зубчасті передачі призначені для передачі руху з одночасною зміною кутової швидкості та відповідно обертового моменту.
Рухомими ланками зубчастого механізму є зубчасті колеса, які утворюють зі стояком нижчу кінематичну пару, а між собою - вищу.
Елементами цієї вищої кінематичної пари є бокові поверхні зубців.
Лінія перетину бокових поверхонь зубців із площиною, перпендикулярною до осі обертання колеса, називається профілем зубця.
Менше з двох коліс називається шестернею, більше – колесом.
За формою колеса бувають: круглі, конічні, еліптичні.
Задача синтезу зубчастого зачеплення полягає в проектуванні елементів вищої кінематичної пари зубчастого зачеплення, тобто, профілів зубців, відповідно до заданих умов.
Умовами синтезу є:
положення осей обертання (паралельні, пересічні, перехресні);
необхідне передаточне відношення;
якісні показники зачеплення (коефіцієнти перекриття, відносного ковзання, питомоготиску);
експлуатаційні умови (плавність і безшумність роботи передачі, міцність, довговічність тощо).
61. Геометричні елементи зубчастого колеса.
На рис. 9.1. наведена схема зубчастого зачеплення та позначення основних параметрів.
Термінологія надана за ГОСТ 16530-83.
Індекси для позначення коліс: 1 – шестерня; 2 – колесо.
|
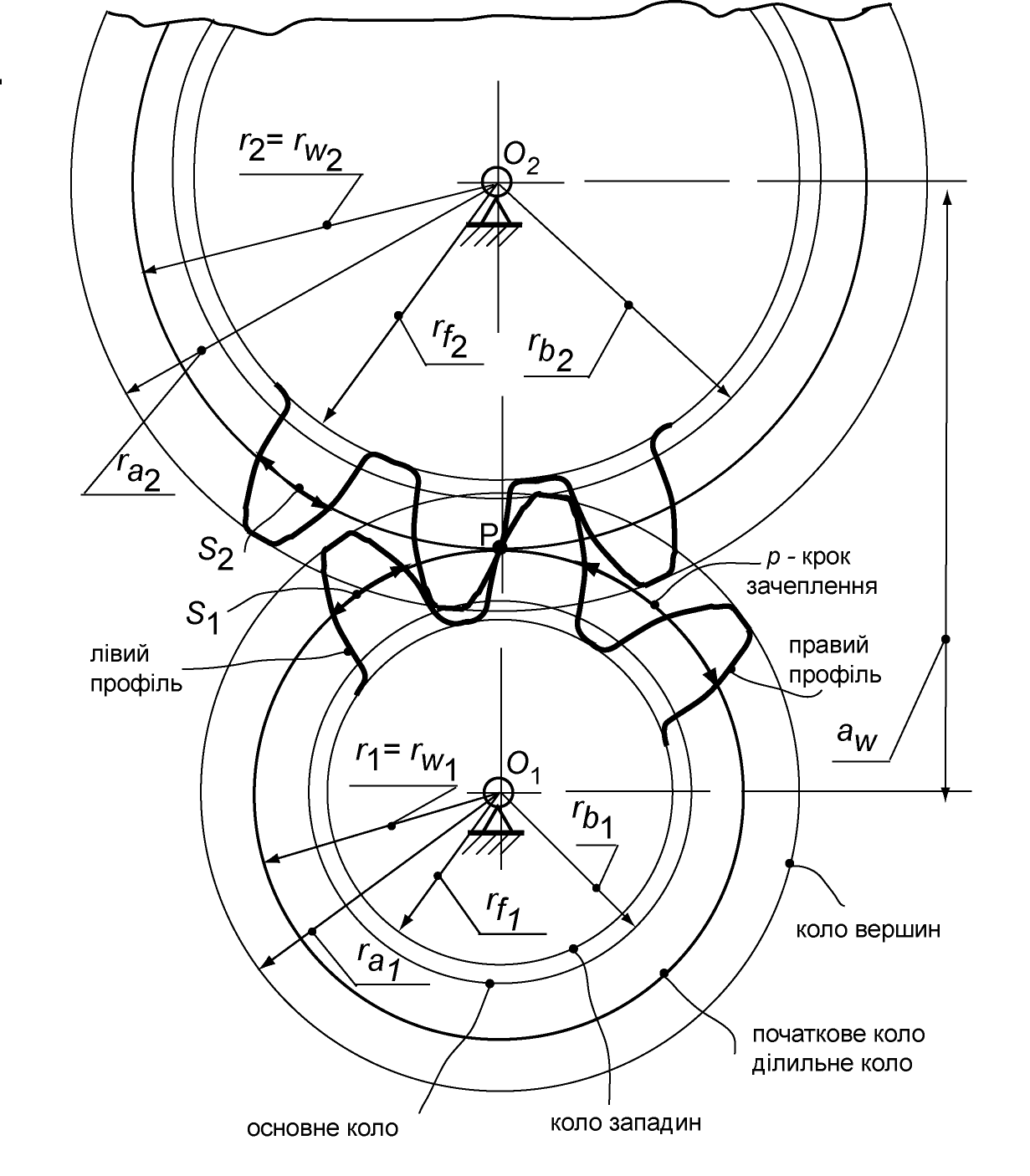
Ділильне коло – це базове коло, відносно якого визначаються всі геометричні параметри зубчастого колеса.
На рис. 9.1:
![]() -
радіуси ділильних кіл шестерні та
колеса;
-
радіуси ділильних кіл шестерні та
колеса;
![]() -
радіуси початкових кіл шестерні та
колеса;
-
радіуси початкових кіл шестерні та
колеса;
![]() -
радіуси основних кіл шестерні та колеса;
-
радіуси основних кіл шестерні та колеса;
![]() -
радіуси кіл вершин шестерні та колеса;
-
радіуси кіл вершин шестерні та колеса;
![]() -
радіуси кіл западин шестерні та колеса;
-
радіуси кіл западин шестерні та колеса;
![]() -
товщини зубців шестерні та колеса.
-
товщини зубців шестерні та колеса.
Основне коло – це геометричне місце центрів кривизни профілю зубця.
Крок зачеплення – це відстань по ділильному колу між однойменними профілями двох сусідніх зубців.
Позначимо:
- крок зачеплення;
![]() - число зубців;
- число зубців;
![]() - діаметр ділильного колеса.
- діаметр ділильного колеса.
Тоді довжина ділильного кола:
Основний закон зачеплення
Нормаль профілів зубців завжди проходить через миттєвий центр обертання, який ділить міжосьову відстань на відрізки, обернено пропорційні кутовим швидкостям.
Профілі зубців, які задовольняють основному закону зачеплення, називаються спряженими.
Основна вимога до зубчастих механізмів:
|
|
|
|
|
 .
.
|
У
полюсі зачеплення Р:
![]()
Коефіцієнти відносного ковзання:
|
(9.20) |
У
полюсі зачеплення Р:
![]() .
.
Висновки з основного закону зачеплення:
Профілями зубців можуть бути дві будь-які взаємообвідні лінії: пряма, парабола, гіпербола, евольвента тощо. Однак, профілі зубців мають відповідати ще й експлуатаційним умовам (технологічності, міцності, довговічності тощо), тому на практиці за профіль зубців приймають:
евольвенту кола;
циклоїдальні криві;
дуги кола.