

5.5.2. Кінематичний ланцюг із вищими парами
Нехай до ланки ВС із вищою парою С прикладені головний вектор і головний момент усіх сил, ураховуючи й сили інерції (рис. 5.10).
Невідомими є: - реакція в шарнірі В (невідома за величиною та напрямком); - реакція в поступальній парі (невідома за величиною), точка прикладання її відома.
 Умова
статичної визначуваності
плоского
КЛ із вищими парами:
Умова
статичної визначуваності
плоского
КЛ із вищими парами:
![]() або
або
|
(5.12) |
отже,
![]() ,
3=3.
,
3=3.
Умова справедлива тільки для плоскої системи сил.
5.5.3. Умова статичної визначуваності просторового
кінематичного ланцюга (КЛ)
Для просторового КЛ справедлива умова:
![]() або
або
|
(5.13) |
32 Теорема м.Є. Жуковського
Якщо зрівноважену систему сил, що діють на ланки механізму, перенести в однойменні точки повернутого на 900 плану швидкостей механізму, то сума моментів цих сил відносно полюса плану дорівнює нулю.
Доведемо цю теорему (див. рис. 5.13):
1.
Нехай маємо механізм
![]() ,
на ланки якого діють сили
,
на ланки якого діють сили
![]() .,
що є рівнодіючими всіх сил і прикладені
відповідно в т.
.,
що є рівнодіючими всіх сил і прикладені
відповідно в т.
![]() (рис. 5.13,а).
(рис. 5.13,а).
2. На повернутий на 900 план швидкостей у однойменні точки (знайдені за подібністю) переносимо сили (рис. 5.13,б).
3. Для доведення теореми скористаємося принципом можливих переміщень, відомий з курсу теоретичної механіки.
Сума елементарних робіт на можливих переміщеннях дорівнює нулю.
-
 .
.
Треба
довести, що
![]() .
.
4.
Позначимо плечі сил
![]() ,
а також кути
,
а також кути
![]() між векторами швидкостей
між векторами швидкостей
![]() та цими плечами.
та цими плечами.
5.
Складаємо рівняння суми моментів усіх
сил відносно полюса плану
![]() .
.
Скористаємося поняттям доведення від зворотного, тобто прирівнюємо суму моментів сил не нулю, а деякій величині А,
далі
треба довести, що
![]() .
.
-
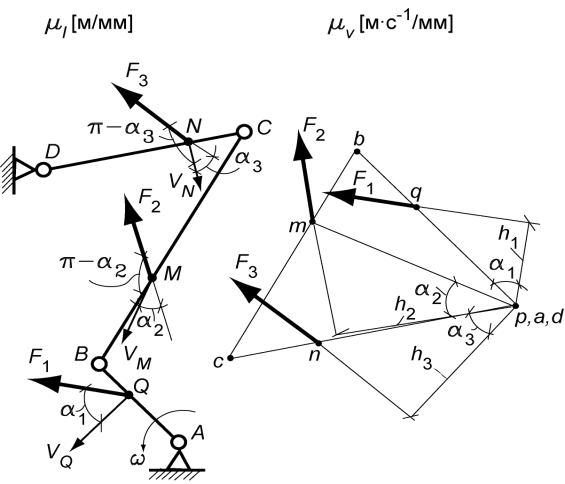
Рис. 5.13: До теореми Жуковського:
а. – план механізму; б. – план швидкостей, повернутий на 900
6. Із плану швидкостей бачимо, що плечі сил , можна виразити таким чином:
|
(5.44) |
7. Якщо помножити всі складові цього рівняння на масштаб , маємо швидкості точок :
![]() .
.
або
|
(5.45) |
8.
Розглянемо, що це за кути
.
Для цього переносимо вектори швидкостей
![]() на план механізму в точки
,
повертаючи їх попередньо на кут 900
проти напряму повороту плану швидкостей
(рис. 5.13,б). Як бачимо, це кути між векторами
сил
і векторами швидкостей
(два останніх – між їх продовженнями).
на план механізму в точки
,
повертаючи їх попередньо на кут 900
проти напряму повороту плану швидкостей
(рис. 5.13,б). Як бачимо, це кути між векторами
сил
і векторами швидкостей
(два останніх – між їх продовженнями).
9.
Помножимо всі частини попереднього
рівняння на
![]() ( у лівій частині отримаємо елементарні
переміщення точок
),
а також урахуємо знаки “cos”:
( у лівій частині отримаємо елементарні
переміщення точок
),
а також урахуємо знаки “cos”:
![]()
|
(5.46) |
Примітка: знаки “+” з'явилися за рахунок напрямів швидкостей.