Зайві степені вільності (місцеві рухомості) механізму.
Розглянемо приклад кулачкового механізму з гострим штовхачем
Визначимо степінь рухомості даного плоского механізму за формулою Чебишева:
![]() .
.![]() Потрібен
1 двигун.
Потрібен
1 двигун.
Даний механізм має великий недолік – гострий штовхач призводить до великого тертя та відповідно зношування поверхні кулачка.
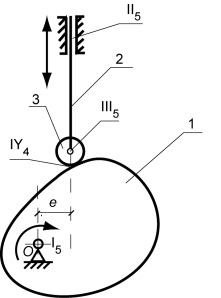
Для зменшення тертя в механізм уводиться додаткова ланка – ролик 3 (рис. 3.7), тому що тертя кочення менш за тертя ковзання, і знос поверхні кулачка зменшується.
Визначимо степінь рухомості механізму на рис. 3.6:
![]() .
.![]()
це означає, що в механізмі є місцева рухомість (ролик 3 обертається навколо власної осі).
Фактичний степінь рухомості , другий двигун не потрібен.
М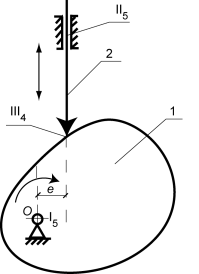
 ісцева
рухомість не впливає негативно на роботу
механізму, навпаки, як в даному випадку,
покращує її (зменшення тертя).
ісцева
рухомість не впливає негативно на роботу
механізму, навпаки, як в даному випадку,
покращує її (зменшення тертя).
Заміна в плоских механізмах вищих кінематичних пар нижчими.
Контрольна №4
Утворювання механізмів шляхом нашарування структурних груп (груп Ассура).
Л.В.Ассур (1878-1920 р.р.) довів, що будь-який механізм може бути утворений шляхом приєднання до так званого початкового механізму структурних груп – груп Ассура.
Більшість
механізмів мають степінь рухомості
![]() ,
отже, у більшості випадків початковий
механізм один.
,
отже, у більшості випадків початковий
механізм один.
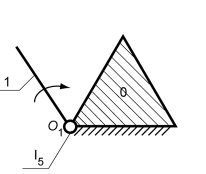
За початкову ланку найчастіше приймають кривошип (а) або повзун (б), тому початковий механізм має вигляд :
|
|
|
|
а. |
б. |
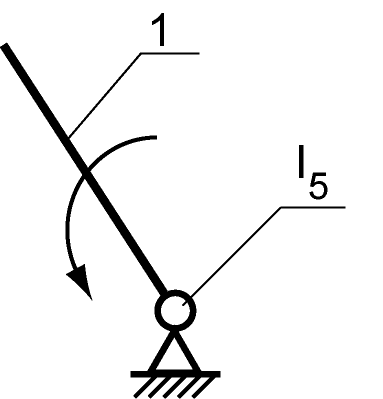
1-го класу (за Ассуром – 1-го класу 1-го порядку).
Класифікація механізмів. Структурна класифікація за Ассуром. Формула будови механізму.
Існує три принципи класифікації механізмів:
структурно-конструктивна (механізми: шарнірно-важільні, кулачкові, зубчасті, фрикційні, з гнучкою ланкою тощо);
функціональна (за призначенням: механізми передач, сортування, вмикання, вимикання тощо);
структурна (за Ассуром).
Клас механізму визначається класом найскладнішої групи Ассура, що входить до його складу.
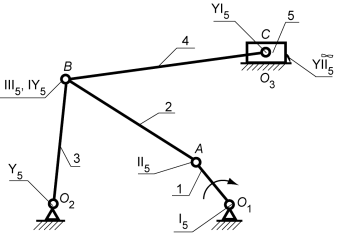
Розглянемо приклад: маємо шарнірно-важільний механізм (ШВМ) завантажника термічної печі (рис. 3.12).
Визначаємо степінь рухомості даного плоского механізму за формулою Чебишева:
![]()
Потрібен 1 двигун.
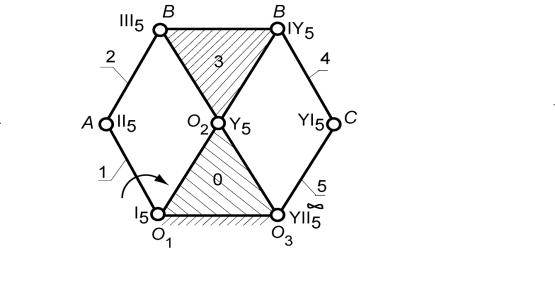
Складаємо допоміжну таблицю ланок і кінематичних пар
(рис. 3.12, б) для подальшої побудови структурної схеми за відомим алгоритмом (рис. 3.12, в).
Будуємо стояк за числом його елементів – 3 (трикутник).
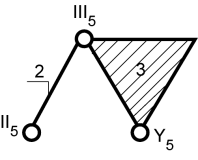
Будуємо ланки, які утворюють кінематичні пари зі стояком (це ланки 1, 3 ,5), причому ланка 3 – триелементна (трикутник).
Будуємо решту ланок у порядку утворювання замкнутих контурів (ланки 2 і 4).
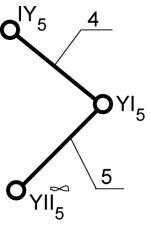
Розбиваємо структурну схему на групи Ассура (рис. 3.12, д, е), виділивши початковий механізм (рис.3.12, г ).
Складаємо формулу будови механізму:
![]() .
.
Отже, даний механізм є механізмом 2-го класу.
|
|
|||||||||||||||||
а. |
в. |
|||||||||||||||||
б. |
||||||||||||||||||
|
|
|
||||||||||||||||
|
|
|
||||||||||||||||
г. |
д. |
|
||||||||||||||||
|
||||||||||||||||||